
应用匹配场实现单矢量水听器被动定位*
2014-07-18 11:03孙大军师俊杰
传感器与微系统 2014年4期
张 宇, 孙大军, 师俊杰, 王 琦
(哈尔滨工程大学 水声技术重点实验室,黑龙江 哈尔滨 150001)
应用匹配场实现单矢量水听器被动定位*
张 宇, 孙大军, 师俊杰, 王 琦
(哈尔滨工程大学 水声技术重点实验室,黑龙江 哈尔滨 150001)
将匹配场原理应用到单矢量水听器上,实现对目标声源的被动定位。对常用的2种Bartlett处理器进行仿真分析,提出了一种改进的Bartlett处理器,可以抑制旁瓣个数并提高主瓣强度。通过试验数据分析,在1.3 km的范围内,接收信噪比不低于10 dB时,测距和测向误差可以控制在10 %以内。该研究为单矢量水听器的实际应用提供了重要的参考依据。
水声; 矢量水听器; 匹配场处理
0 引 言
水声学研究中包含3个最基本的研究要点:目标辐射声源、传播声信道以及接收换能器。作为声场的源头,声源在水中辐射出的声信号,其传播特征受海洋声信道的制约,并最终被水听器所采集接收。这3个研究要点彼此互相联系,构成了一个不可分割的整体。当已知水听器的接收数据,同时利用声传播信道特性和海洋环境参数对声场进行建模计算,通过数据间的匹配处理可以得到声源的位置信息,这就是匹配场被动定位的基本原理[1~3]。
在水声工程领域,传统的接收传感器为标量换能器,只能测量声场中的声压等标量参数,无法完整地采集声场信息。矢量水听器的研究工作始于20世纪50年代,是近期国内外水声换能器领域的研究热点。除声压外,矢量水听器还可以测量质点振速等矢量参数,有助于研究者完整的了解声场信息。相对于传统的标量系统,矢量水听器可以同时共点地测量声压和振速信息,具有良好的抗相干干扰能力与线谱检测能力,并且单矢量水听器在方位估计上具有天生的优势[4]。
目前,通用的匹配场定位是采用声压垂直阵或水平阵的方式进行,该种方法主要有两方面因素影响限制定位性能,一是声压水听器无法提供任何的目标声源的角度信息,必须依靠阵列信号处理的方式获取方位信息;二是对于阵列处理,尤其是匹配场定位中常用的垂直阵列,会存在倾斜、阵元深度、阵元间隔等失配问题,严重影响定位效果。针对以上问题,本文研究如何应用单矢量水听器进行宽带信号的匹配场定位。
1 匹配场处理与仿真
由于基于单矢量水听器的测向算法已非常成熟[5,6],所以,接下来的研究重点在于如何使用匹配场方法进行单矢量水听器的测距和测深。常用的匹配场处理方法有线性匹配场处理和自适应匹配场处理2种。本文主要讨论使用最为成熟的Bartlett线性匹配场处理器,其工作原理是:通过环境参量和声场模型得出拷贝场向量,然后采用拷贝场数据和实际测量数据直接相关的方法得出目标声源的估计位置,测量场数据由水听器端接收到的时域信号做FFT所得的互谱密度矩阵表征。相比于自适应处理器,Bartlett方法对环境的敏感度较弱,稳健性较强,但旁瓣较高[7]。典型的匹配场Bartlett处理方法如图1所示。
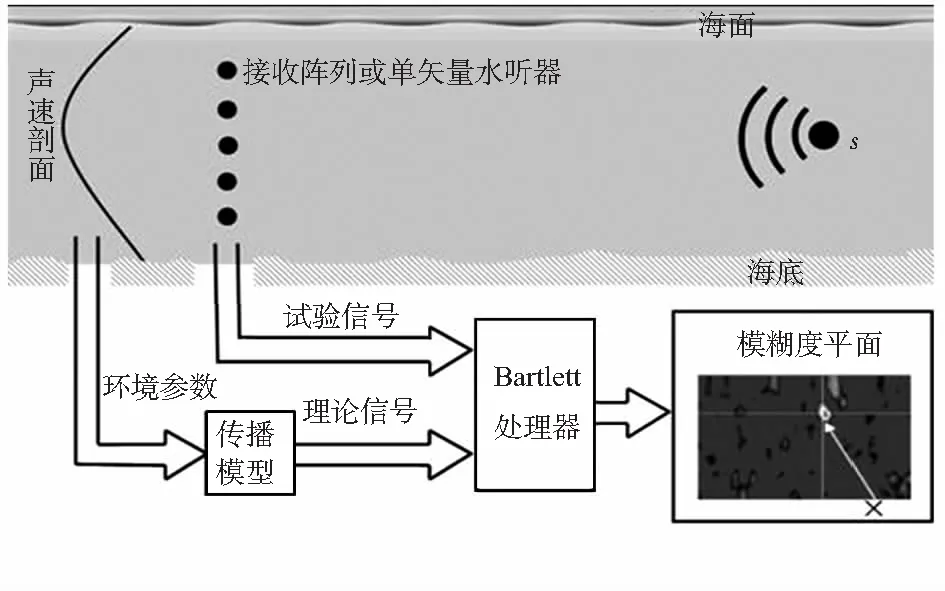
图1 典型匹配场处理Fig 1 Typical matched field processing
式(1)和式(2)给出了2种Bartlett处理器匹配表达式[8],其中,式(1)为声压p与水平合成振速Vr进行Bartlett匹配处理,式(2)为声压p与垂直振速Vz进行Bartlett匹配处理

(1)

(2)
式中p为声压向量,Vr为水平方向振速向量,Vz为垂直方向振速向量,r为目标距离,z为目标深度,H表示共轭转置,上标c表示拷贝场,上标d表示测量场。
针对式(1)和式(2)做仿真分析,仿真条件如下:声源频率为10~100 Hz,接收信噪比20 dB,声源深度55 m,声源距接收矢量水听器距离1 320 m,矢量水听器布放深度45 m,海深80 m。为了更真实地反映海洋环境,使用快速场算法计算拷贝声场,声速剖面与环境模型如图2、图3所示。
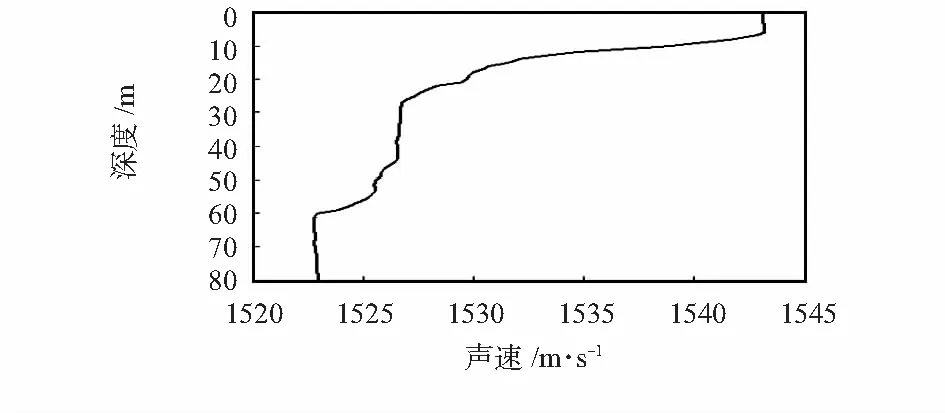
图2 声速剖面Fig 2 Sound speed profile

图3 环境模型Fig 3 Environmental model
其中,z轴是深度方向,水层厚度h0为80 m,沉积层厚度h1为50 m,声速为1 644 m/s,底质密度为1 595 kg/m3,基底层声速为1 780 m/s,基底层层密度为1 900 kg/m3,距离搜索范围为500~2 000 m,深度搜索范围为40~80 m。匹配场定位结果如图4与图5所示,其中,图4声压p与水平合成振速Vr进行Bartlett匹配处理的结果,图5为声压p与垂直振速Vz进行Bartlett匹配处理的结果。
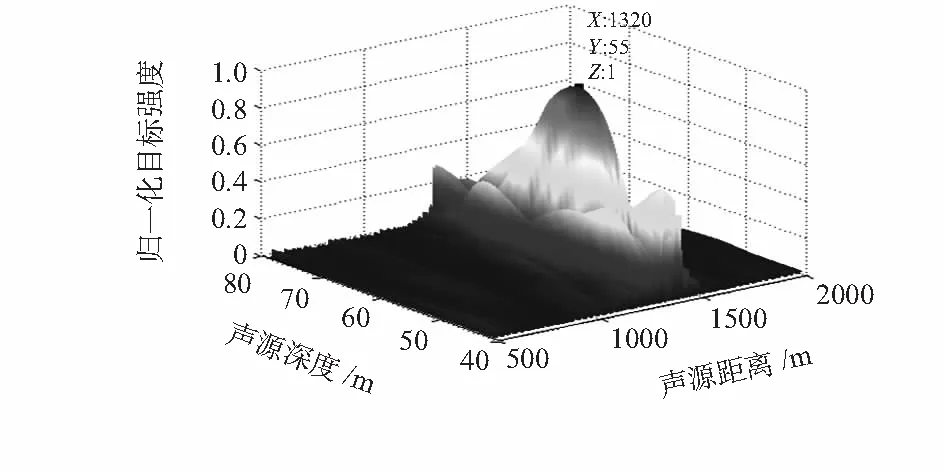
图4 Bartlett 处理器(pVr) Fig 4 Bartlett processor(pVr)
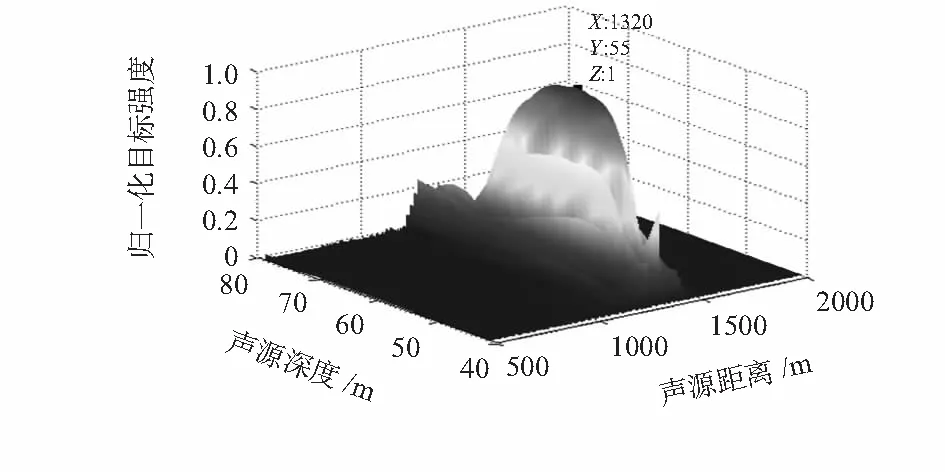
图5 Bartlett 处理器(pVz) Fig 5 Bartlett processor(pVz)
从以上的仿真结果可以看出:2种方法都可以完成基于单矢量水听器的宽带信号定位,pVr方法的主瓣相对尖锐些,干扰旁瓣的个数较多,pVz方法的主瓣明显钝化,干扰旁瓣个数较少,二者的主旁瓣比皆为1︰0.6左右。
为了最大限度地发挥以上2种算法的优点并回避其缺点,从水平通道与垂直通道数据融合的角度,提出了一种改进的Bartlett处理器算法,计算方法如式(3)所示,对应仿真结果如图6所示。
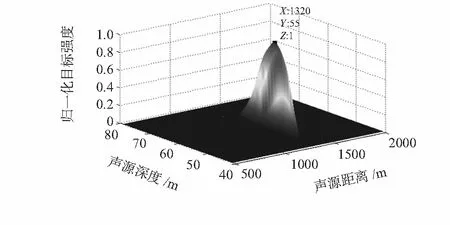
图6 改进Bartlett处理器 Fig 6 Improved Bartlett processor

(3)
从图中可以看出:经过二次拟合处理后的定位模糊面,主峰尖锐,且基本上完全消除了旁瓣的影响。
2 海试试验
2013年7月,于某海域进行了海试试验,试验海域海深85 m左右,搭载矢量水听器的潜标布放深度为45 m,使用线性调频声源信号作为目标信号,发射频率为40~100 Hz,声源深度55 m与潜标水平距离在1 km,试验期间试验船锚定,具体位置信息和深度信息由GPS和深度计获取。图7为接收信号声压和道互谱的时间历程图,从图中可以看出:信号接收信噪比不低于10 dB。

图7 接收信号频谱图Fig 7 Frequency spectrum of receiving signal
使用改进Bartlett方法进行匹配场定位,依然使用快速场计算软件计算声场,环境参数与仿真分析时一致,底质参数源自对试验海域匹配场反演得到的数据。最终的定位结果的模糊面图如图8所示,图9和图10给出了距离和深度多次测量的结果。

图8 定位结果Fig 8 Localization result
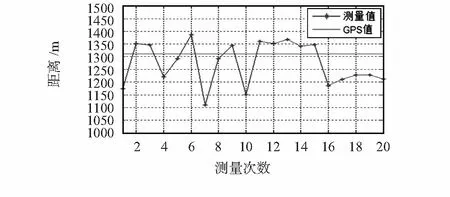
图9 距离测量结果Fig 9 Results of distance measurement

图10 深度测量结果Fig 10 Results of depth measurement
3 结 论
本文给出了利用低频矢量水听器估计低频(40~100 Hz)声目标距离和深度的方法,并进行了海上试验验证。海试结果表明:单矢量水听器可以利用匹配场处理方法有效的对目标声源的距离及深度进行估计,在1.3 km围内,接收信噪比不低于10 dB测距和测向误差可以控制在10 %以内。
[1] Baggeroer A B,Kuperman W A,Mikhalevsky P N.An overview of matched field methods in ocean acoustics[J].IEEE Journal of Oceanic Engineering,1993,18:4-16.
[2] Mecklenbrauker C F,Geravanchizadeh M,Bohme J F.Broadband matched field processing using robust prewhitening and multiple window techniques[C]∥Proceedings of ICASSP’96 Conference,Atlanta,GA,USA,1996:3081-3084.
[3] Yang Kunde,Ma Yuanliang,Yang Yixin.A novel adaptive matched field processor with environmental mismatch and under-sampling[C]∥2005 Fifth International Conference on Information,Communications and Signal Processing,Bangkok,2005:1269-1273.
[4] 陈丽洁,张 鹏,徐兴烨,等.矢量水听器综述[J].传感器与微系统,2006,25(6):5-8.
[5] 陈 川.低频矢量水听器目标绝对方位估计海上试验研究[J].传感器与微系统,2012,31(7):58-60.
[6] 姚直象.单矢量水听器目标方位估计[D].哈尔滨:哈尔滨工程大学,2005.
[7] 杨德坤.水声阵列信号的匹配场处理[M].西安:西北工业大学出版社,2008.
[8] 王学志,涂 英,吴克桐,等.应用匹配场实现单矢量水听器的三维定位[J].声学技术,2012,31(1):72-76.
Passive location realization of single vector hydrophone by applying matched field*
ZHANG Yu, SUN Da-jun, SHI Jun-jie, WANG Qi
(Science and Technology on Underwater Acoustic Laboratory,Harbin Engineering University,Harbin 150001,China)
Matched field principle is applied to single vector hydrophone to realize passive location of target acoustic source .Two kinds of commonly used Bartlett processor are simulated.An improved Bartlett processor which can both restrain the side lobe numbers and improve the main lobe intensity is proposed.Through analyzing experimental data,at the range of 1.3 km,when the SNR is not less than 10 dB,error of ranging and direction finding can be controlled within 10 %.The study provides important reference for practical application of single vector hydrophone.
underwater acoustics; vector hydrophone; matched field processing
2014—01—20
国家“863”计划资助项目(2012AA090901)
TN 911
A
1000—9787(2014)04—0021—03
张 宇(1984-),男,黑龙江哈尔滨人,博士研究生,主要研究方向为纯方位被动定位、单矢量水听器匹配场定位技术等。
猜你喜欢
数学物理学报(2022年4期)2022-08-22
舰船科学技术(2022年11期)2022-07-15
电声技术(2022年3期)2022-04-28
合肥工业大学学报(自然科学版)(2020年11期)2020-12-05
海军航空大学学报(2020年2期)2020-07-27
应用科技(2020年1期)2020-06-18
压电与声光(2019年4期)2019-08-29
汽车工程(2018年12期)2019-01-29
电子技术与软件工程(2017年12期)2017-07-05
电测与仪表(2016年9期)2016-04-12
