
北斗导航系统在我国精准农业中的应用
2014-07-02 01:42中国电子科技集团公司第五十四研究所何成龙
卫星应用 2014年12期
· 文|中国电子科技集团公司第五十四研究所 何成龙
北斗导航系统在我国精准农业中的应用
· 文|中国电子科技集团公司第五十四研究所 何成龙
卫星导航技术是精准农业技术的基本组成之一,是实现土壤及作物监测、农机定位与自动作业的基础。随着精准农业技术的不断发展和应用,对卫星导航定位精度的要求不断提高,依靠卫星导航实现分米级至厘米级的定位精度成为未来精准农业应用的基本保障。随着我国北斗卫星导航系统的建设发展,北斗系统已可提供可靠的无源定位服务,可满足精准农业应用对高精度定位、低成本化等需求,具有良好的应用优势和潜力,是未来我国精准农业技术发展的核心组成。
精准农业 北斗卫星导航系统 高精度定位 应用优势
精准农业是将导航、通信与自动化控制技术运用于农业生产,利用现代机械设备与监测系统进行田间管理,针对田间具体环境与作物状况因地制宜,精细准确地开展施肥、施药等土壤管理及播种、收割等作物管理措施。精准农业的目的为降低产业投入条件下获取更优的产出,提升作物产量和质量,保护生态环境,促进农业可持续发展[1-3]。精准农业体系主要包括卫星导航系统、地理信息系统、遥感技术、管理信息系统及自动化控制等技术[2](图1)。
卫星导航技术在精准农业中的应用主要体现在以下两方面:农业信息的定位,包括农业土壤及作物监测信息的准确定位等,便于分析处理和决策;农业机械的自动导航控制,包括田间作业农机的自动导航驾驶与作业控制等,提高农机的工作效率。北斗卫星导航系统可提供免费、实时的无源定位服务,为农业机械的智能控制提供导航定位信息。随着北斗卫星导航系统的进一步建设,北斗将成为我国精准农业技术发展的核心组成之一。
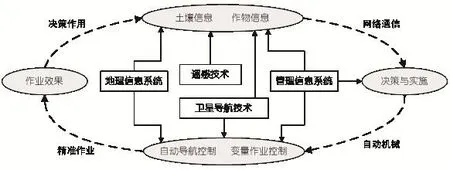
图1 精准农业技术组成
一、 卫星导航技术在国外精准农业中的应用
近20年来精准农业技术在国外得到了快速发展,实现了大规模、自动化、精细化农业生产,获得了十分可观的经济效益。
20世纪80年代美国提出了精准农业的构想,1995年美国在联合收割机上装备GPS,实现了精细化作物收割应用,标志着精准农业技术的诞生[3]。在随后的发展中,利用GPS、计算机网络和自动化机械的结合逐渐实现了播种、收割、施肥、灌溉等农业作业的精细化,大大降低了大面积作业下的人力和资源投入,提高了工作效率和经济收益。
欧洲、北美、澳大利亚、日本等多个国家相继开展本国精准农业,并基于卫星导航、微机械惯导(MEMSINS)等技术发展相应的自动化农机,实现自动化作业生产,如无人播种机、无人驾驶拖拉机等。
目前,国外精准农业普遍基于GPS卫星导航系统。伴随着自动化农机和飞行器材的应用,需要GPS接收机提供分米级至厘米级的定位精度。DGPS(差分GPS)得到了普遍应用,依靠载波相位差分(Real Time Kinematic,RTK)技术可为农机提供可约达2cm的定位服务。
二、精准农业对定位精度的需要
精准农业对卫星导航定位精度的需求与作物种类和作业方式高度相关,但随着定位性能的提升投入成本也迅速增加,图2为精度需求和成本间的大致关系。
针对精准农业应用的卫星导航产品普遍集中在2~5m定位精度范畴[4],这是由于接收机设计可在适度增加成本的基础上基于多种改进算法达到比普通接收机更优的定位性能,且5m的定位精度可显著提升人工作业效率,如人工操作机械收割或航空喷洒等应用,对于中小型农田作业具有良好的成本和效率优势。
对于特大型农田,需要最大程度地降低人力投入和提升作业效率与质量,以提升作物产出,精细至2~20cm的播种与收割需要自动化农机完成,在这种条件下对于特大型农田采用DGPS的成本投入相对于产出仍具有良好的适应性。
精准农业的总体发展趋势是实现高精准、自动化作业,为了提升精准农业水平,推广DGPS在精准农业中的应用,国外相关厂商正在逐步降低差分系统的成本,以适应各类农田特别是大中型农田应用对成本的需求。
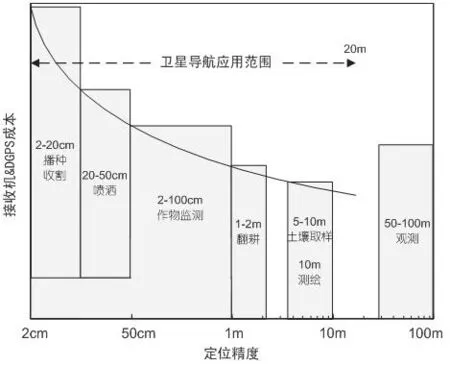
图2 精准农业定位精度需求
三、 北斗系统在精准农业中的应用分析
1. 北斗卫星导航系统的技术优势
北斗卫星导航系统是我国拥有自主知识产权的卫星导航系统,目前北斗二代系统已可为中国及周边区域提供免费的无源定位服务,北斗已具备为我国精准农业发展提供技术基础的能力。
相对于国外卫星导航系统,北斗在我国精准农业中的技术优势包括:
(1)信号覆盖能力好
北斗系统特有的GEO+IGSO+MEO星座分布使得卫星更多地分布在东经84°~160°区域,随着北斗二代系统的进一步建设,北斗在中国区域内的卫星可见性优势会进一步体现。北斗信号具备更优的信号覆盖性能,使得复杂地形等遮蔽环境下具有更多的可用信号,能够依靠北斗实现稳定定位,更好地满足这些地区精准农业发展对卫星定位连续性和有效性需求。
(2)提供三频定位,提高定位精度
北斗已可为民用用户提供B1/B2/B3 3个频点的定位服务,分别为1561.098MHz、1207.14MHz、1268.52MHz。对于单点定位,三频有助于将空间导航信号传播的电离层误差更好地消除,以获得精度更优的定位性能;对于载波相位测量,北斗的三频可获得更优的宽巷效应,有助于整周模糊度的快速收敛,获得更快的定位速度。
(3)提供短报文通信能力
北斗独具RDSS短报文通信服务能力,无需地面通信基站,可满足远程通信及偏远地区通信的应用;通信成本低,容量大,通常一部RDSS指挥机可与数百台流动站间进行通信,通信成本费用低廉,对于以长期、频繁、单次信息容量小为主要通信特点的精准农业应用,通信成本远低于地面移动通信。
2.北斗在精准农业中的应用模式
北斗卫星导航系统在我国精准农业的发展与应用需要与我国农业发展现状与趋势相结合。受经济水平、人口密度和耕地分布的影响,精准农业在我国农业体系中所占比例相对不高,技术推广率低,特大型及大型农田较少,因此我国尚不能大范围采用全自动化农机,人工操作机械仍为主要作业工具。
北斗卫星导航在精准农业的应用可包含两种应用模式,一种为面向无人作业应用,采用差分定位体制,应用于特大型及大型农田;一种为面向辅助作业应用,采用高精度接收机体制,应用于大中型农田。其中无人作业应用的模式如图3所示。
在图3中,地面设备包括一个北斗地基差分站;装备有北斗差分接收机的自动化农机;用于作物和土壤监测中定位的移动差分接收机;用于处理分析信息并生成决策的控制中心。北斗差分站接收北斗卫星导航信号,并向服务区内播发差分信息,差分接收机接收空间导航信号和差分信号来定位;对于自动化农机,在接收到控制中心的决策后根据自身定位数据按照规划的轨迹行驶,并根据任务决策在不同的作业区域调整作业强度,如喷淋流量、播种密度等,并实时通过地面通信/RDSS通信将自身的定位信息传递至控制中心;对于作物及土壤监测,在开展监测时通过差分接收机将定位信息发送至控制中心以便于分析处理。通常,一台差分站可实现数十千米内的差分接收机达到分米级至厘米级的定位精度。
辅助作业应用模式如图4所示。
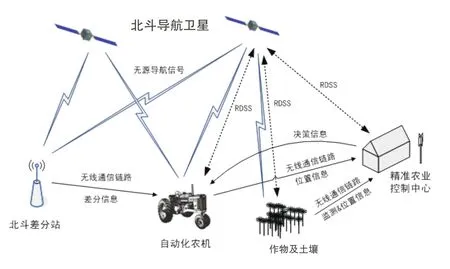
图3 北斗在无人作业中的应用
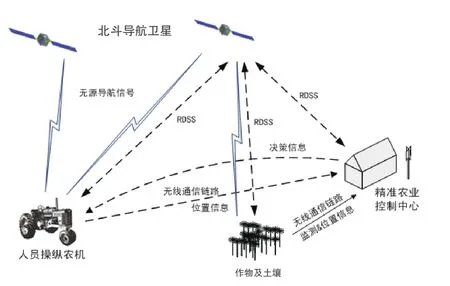
图4 北斗在辅助作业中的应用
与无人作业应用的主要不同包括以下几点:系统不包含地面差分站;接收机为基于算法改进的高精度接收机;可包含有控制中心及相应的通信链路,但也可依靠作业前规划来取代。从系统性能上,作物及土壤的监测精确度下降,但仍可满足一定程度上的信息分析;若以作业前规划的方式,则对农机的实时任务调整能力相对较差;对于农机,受限于定位精度仍需要人工的参与,但借助于定位信息可大大提高作业的准确性和效率。
3. 北斗导航装备与自动化农机的整合
自动化农机是无人自动化作业主要实现载体,RTK定位是自动化农机的基本技术之一。
自动化农机作业包括自主驾驶和自主作业两部分,自主驾驶是指按照规划的轨迹自动完成运行和速度控制,自主作业是指在指定区域开展指定种类和强度的作业活动。达到这一目标需要实现精准定位、测向测姿、变量控制、自动驾驶和有效通信等。对于北斗卫星导航装备,在自动化农机上的作用体现在三个方面:一为通过北斗RDSS通信实现农机和管理中心间的信息交互,满足指令的传递和信息反馈;通过北斗RTK接收机实现高精度定位,为运行和作业自动控制提供基本位置信息;通过北斗RTK多天线方式提供基本测姿测向数据,并和低成本MEMS进行信息融合,为自动化农机设备自动控制提供测姿测向信息。
通过通信、导航定位、自动控制的整合,可实现自动化农机的自主驾驶和自主作业,实现自动化精准农业生产。
目前我国已具备可用于精准农业的北斗导航定位装备,其产品特点如下:
·支持北斗/GPS双模定位;
·支持单点定位/动态RTK定位;
·支持基准站/流动站切换;
·信号种类:
GPS L1C/A, L2P(Y), L2C;
北斗 B1I, B2I, B3I;
·单点定位精度:
水平1.8m 垂直3.6m;
·动态RTK定位精度:
水平10mm±1ppm 垂直20mm±1ppm。
北斗高精度接收机与国外产品相比,优势体现在:
1)达到国外GPS RTK产品的定位标准,定位精度可达厘米级,百公里内达分米级;
2)支持北斗/GPS双模多信号体制运作,除可支持现有的DGPS工作模式外还可支持北斗工作模式,具有更强的工作能力;
3)支持单点定位,定位精度达到2~4m;
4)价格相对低廉得多,具有良好的应用推广能力。
四、总结
精准农业用以提高作物产量、质量和效益,对我国农业发展具有重要意义。北斗卫星导航系统可为我国精准农业发展提供技术支撑。相对于国外GPS导航定位产品,北斗产品具备两个突出优势:
1) 自主化,不受限于国外技术垄断,便于后期产品的维护、技术升级、产品改造和集成。
2) 更优的性价比,独具三频高精度定位能力和短报文通信能力,综合性能达到过超或国外产品;成本相对低廉。
北斗卫星导航技术及产品在农业领域具有良好的应用推广能力,对我国精准农业的发展和应用推广具有重要意义。
[1]郭信平,曹红杰.卫星导航系统应用大全[M].北京:电子工业出版社,2011.
[2]闵士权.卫星遥感与卫星定位在我国农业信息化建设中的应用[C].2007卫星通信与农村信息化发展研讨会,2007.
[3]李强,李永奎.我国农业机械GPS导航技术的发展[J].农机化研究,2009(8):242-244.
[4]James F.McLellan,Les Friesen.Who Needs a 20cm Precision Farming System?[J].Position Location and Navigation Symposium,1996:426-432.
[5]谢钢.GPS原理与接收机设计[M].北京:电子工业出版社,2009.
猜你喜欢
数学杂志(2022年5期)2022-12-02
湘潭大学自然科学学报(2022年2期)2022-07-28
导航定位学报(2021年4期)2021-08-29
新世纪智能(数学备考)(2021年5期)2021-07-28
中学生数理化·八年级物理人教版(2020年11期)2020-12-14
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01
雷达学报(2017年1期)2017-05-17
百科探秘·航空航天(2016年9期)2016-12-01
太空探索(2015年5期)2015-07-12
