山区高速公路直线段车速预测方法
2014-06-27 06:00邓北川仇建华吴玉春张俊溪
交通科学与工程 2014年3期
王 栋,邓北川,仇建华,吴玉春,张俊溪
(西安航空学院车辆与医电工程系,陕西西安 710077)
中国高速公路总里程已居世界第二位,山区高速公路占有很大的比例。虽然为人们提供了安全和高效的服务,但与普通公路相比,高速公路的事故率、死亡率和受伤率分别是普通公路的7.95倍、4.20倍和4.37倍[1]。而在这些事故中,山区高速公路的事故率占有相当大的比例。研究[2]表明:以60km/h的车速行驶时,车速每提高5km/h,事故发生的危险性将增大两倍。对某条高速公路长期的事故统计中发现,在所有事故中,有72.5%的事故发生在直线段,27.48%的事故发生在曲线段[3]。有1/3的交通事故是由车速原因引起的。在所有致因中,车速排在第二位,仅次于驾驶员[4]。车辆运行速度与平均速度的差越大,发生交通事故的可能性就越大,即车速分布的离散度越高,事故率就越高[5]。
道路设计一致性是指在一定的条件下道路的线形与驾驶员的期望保持一致,它与交通安全有着密切的关系[6-7]。高速公路线形的不一致起源于不同路段的线形变化。路段车辆运行速度的预测不仅可以对道路线形进行评价,而且对事故多发路段安全设施的合理设置具有重要的指导意义[8]。在直线段,由于前、后衔接着曲线,并且在直线段上车辆有较明显的加速,车速的变化很显著。在山区高速公路,这种曲线接直线再接曲线的路段很多,因此,对高速公路直线段车速进行研究具有很重要的意义,可以有效地控制和预防交通事故的发生。
目前,人们对运行车速、运行车速的限制及道路几何线形对运行车速的影响进行过相关的研究,但这些模型没有考虑到路段的连接情况,只能预测所研究路段的中点速度,无法预测驶离路段的终点速度,而这样就可能为用运行速度来进行的安全审核带来困难[9-12]。同时,运行车速模型的建立方法大多是利用回归分析的方式得到的[13-15]。采用回归的方法容易将影响车速变化的道路线形、交通条件及环境条件等因素平滑掉,使计算结果产生较大的误差。而神经网络具有较强的非线性适应能力和良好的容错能力,能够很好地处理多种因素和模糊信息问题。
作者拟采用两阶段预测模式,研究山区高速公路直线段车速预测方法。从道路线形因素和线形衔接出发,建立基于BP神经网络的山区高速公路直线段速度预测模型。为了排除其他因素的干扰,拟选择西汉高速公路中平面线形指标较好的路段作为研究对象,以一系列的实地勘察和实车测试为基础,建立山区高速公路直线段前、后两阶段车速的预测模型,并对所建立的模型进行验证,以表明该模型具有较高的准确性和适应性。
1 基于BP神经网络车速预测模型的建立
1.1 人工神经网络模型的选择
人工神经网络(Artificial Neural Networks,简称为ANNs),也称为神经网络(Neural Networks,简称为NNs),是模拟生物神经网络进行信息处理的一种数学模型[16]。
道路几何线形与运行车速等因素之间存在着一定的非线性关系[17],这种非线性的关系为本研究使用人工神经网络方法、研究道路线形与车速之间的关系提供了可能。由于高速公路直线段车辆运行速度的研究还处于一个初级阶段,数据资料还处于初步积累阶段,现阶段还没有大量现成的基础资料。而BP网络的学习及其响应模式能够适应这种数据不断增加和改善的状况。
1.2 输入输出变量分析
正确预测道路上车辆的运行速度,需要综合考虑各种影响因素,但这样会大大增加模型的复杂性。对于特定路段,对运行车速影响最大的只有个别因素。选择车辆进入直线段的速度x1、直线段前路段线形半径x2、直线段后路段线形半径x3、前一路段道路长度x4、后一路段道路长度x5及直线段长度x6作为模型的输入。
试验直线纵坡路段均较短。通常车辆在高速公路上行驶时,上坡减速,下坡加速,但在山区高速公路上,这种规律不明显,甚至相反。因为山区高速公路车速均较低,约为60~75km/h。当车速较低时,坡度对车速的影响较小。可忽略路段坡度对车速的影响。
预测时,采用两阶段进行。第一阶段,先根据模型预测出直线段中点的速度vpm;第二阶段,根据第一阶段预测的直线段中点的速度vpm,预测出直线段终点的速度vem。将两阶段预测的速度作为模型的输出。模型的网络结构如图1所示。

图1 网络结构Fig.1 Network structure
1.3 模型的建立过程
1)输入层设为:

式中:x1为直线段起点车速;x2为前一路段线形半径;x3为后一路段线形半径;x4为前一路段线形长度;x5为后一路段线形长度;x6为直线段长度。
2)预测模型中输入层对应的输出层为:

3)隐含层各个单元的输入为:

式中:wij为输入层至隐层的连接权重;θj为隐层单元的阈值;p为隐层单元的个数。
转移函数采用Sigmoid函数f(x)=1/(1+e-x),则隐含层单元的输出为:

4)输出层单元的输入为:

输出层单元的输出为:

式中:vjt为隐层到输出层的连接权重;γt为输出层单元阈值。
过程1)~4)为模型的正向传播。在误差反向传播的过程中,通过训练设置好的BP神经网络,使得连接权重wij,vjt和阈值γt不断调整,直至误差减小到要求的精度。则式(6)调整后即为本研究BP神经网络的预测模型。
2 道路试验
实验数据采集的准确度直接关系到数据分析的结果和模型的准确度,实验路段和实验设备的选择是后期数据分析研究的基础。本研究选择西汉高速公路秦岭段(K1132+500~K1158+320)上、下行进行道路试验。该路段设计车速为60km/h,大型车限速为50km/h,小型车限速为60km/h。利用CTM-8C车载非接触速度仪进行速度的采集,并获得连续车速,试验车辆为中型客车,直线段参数和采集的部分数据见表1。
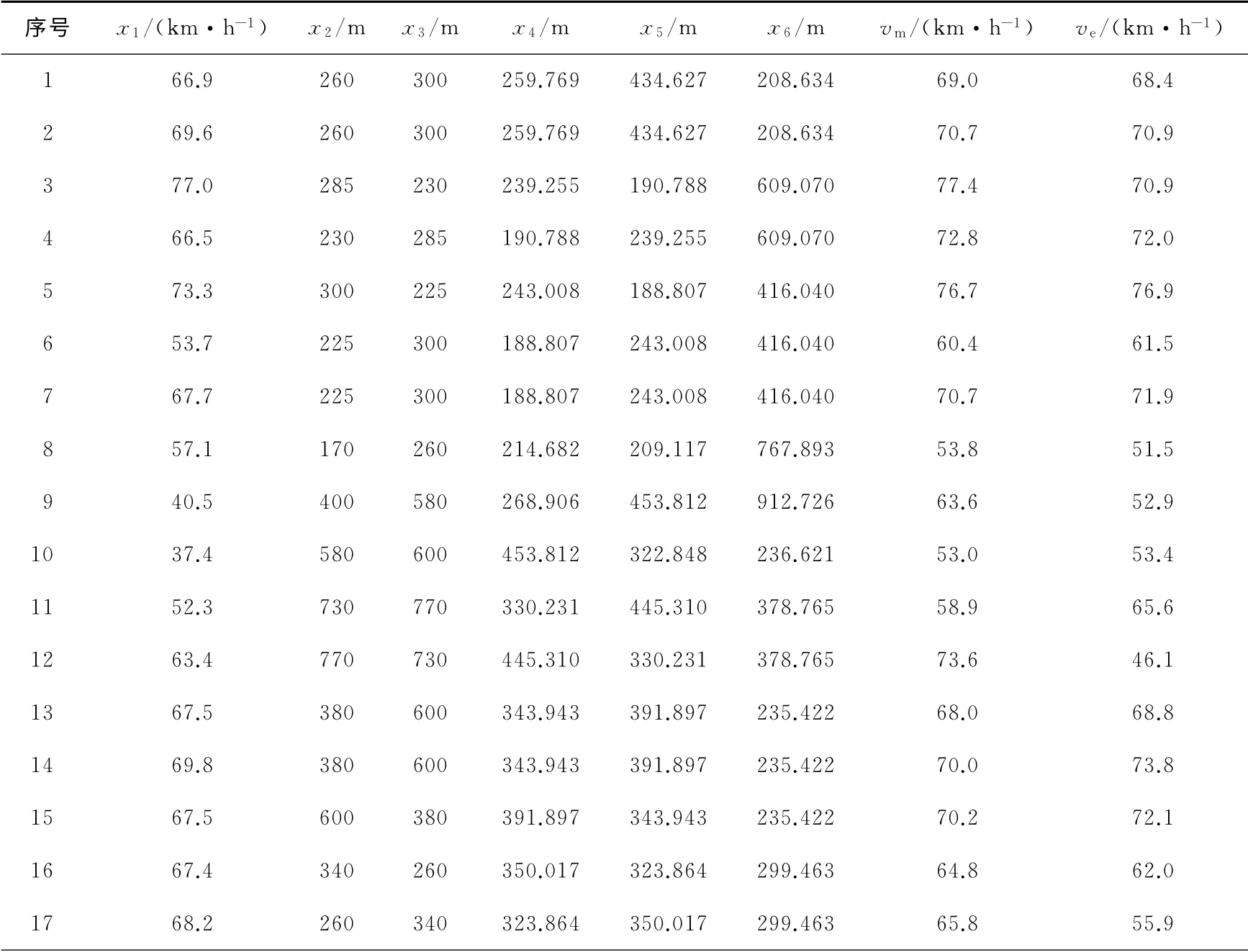
表1 线形参数和采集的速度数据Table 1 Road alignment parameters and speed test

续表1
3 模型设计训练及测试
3.1 模型设计与调试训练
选择表1中前20组数据作为训练样本进行网络训练。在获得样本数据后,由于数据中各个指标都不相同,原始样本中数值大小差异较大,为了运算方便及防止部分神经元达到过饱和状态,在模型设计时,运用函数premn mx对样本数据进行归一化处理。
根据理论分析并考虑现有的数据量等因素,模型结构设计为3层BP神经网络,隐含层神经元为6个,隐含层传递函数为对数S型(Log-Sigmoid)传递函数logsig,输出层传递函数为线性传递函数purelin。选用trainoss(一步正切BP训练函数)作为训练函数。学习函数选用梯度下降动量学习函数learngdm,它利用神经元的输入和误差、权值或阈值的学习速率和动量常数来计算权值或阈值的变化率。网络的性能函数选择均方误差性能函数MSE。
考虑到网络结构较为复杂,神经元个数较多,需要适当地增大训练次数和学习速率,训练次数设定为5 000,训练目标设定为0.001,学习速率设定为0.01。
经过2 241次训练后,网络的误差达到要求,而且训练数据收敛速度较快。MSE=0.000 969 044,训练结果如图2所示。

图2 训练收敛曲线Fig.2 Training curve
3.2 模型的测试
训练好的网络需要进行测试才可判定是否可投入应用。为了更准确地预测网络的性能,必须用训练样本以外的数据来作为测试样本进行网络的测试。用表1中的数据(29组数据除去前20组训练样本数据外的剩余9组)进行模型的测试。测试时仍然使用函数premn mx对测试样本数据进行归一化处理。训练误差曲线如图3所示。在预测直线段末点的速度时,也有类似的规律。测试车速与训练完成后网络所得到的预测车速对比见表2。
从图3中可以看出,基于BP神经网络原理,所建立的高速公路直线段车速预测模型的网络预测值和真实值之间的误差较小,只有个别次出现了一个较大的误差,即使较大的误差也在0.1范围之内,这完全满足应用的要求。网络具有较好的泛化能力。

图3 训练误差曲线Fig.3 Training errors
从表2中可以看出,基于神经网络所建立的车速预测模型的相对误差都小于7%,最大相对误差为6.7%,最大误差为4.7km/h,平均相对误差为3.1%,平均误差为2.1km/h。
综上所述,采用BP神经网络方法建立的模型,能够较好地预测出高速公路直线段的运行车速。相比回归分析等数学拟合的方法(对数据质量要求较高),BP神经网络具有较强的容错性和非线性映射能力,它表现出的优势明显突出,即使数据中存在着一定的噪声,但其对结果的干扰很小。因此,BP神经网络方法明显优于数学回归分析的方法,具有较好的应用价值。

表2 试验车速与预测车速值对比Table 2 Tested vehicle speed compared with the predicted vehicle speed
4 结论
1)考虑到道路线形与运行车速之间的非线性关系,提出了两阶段人工BP神经网络方法来预测高速公路直线段车辆的运行速度。
2)为了使网络模型具有处理多种问题的能力,在设计网络模型结构时采用了开放式的设计理念,用户使用时可以方便地改变输入变量的数量和隐含层的层数,选择不同的训练函数和学习函数等网络结构形式。
3)在网络模型建立的基础上,对模型进行了训练和测试,试验段最大相对误差为6.7%。如果能增大样本数据量,则模型将会达到更高的精度。为高速公路速度预测提出了一种较为可行的方法。同时,在今后的研究中,可以在该模型的基础上进行其他类型公路线形的速度预测。
(References):
[1]高建平.成渝高速公路重庆段安全事故分析研究[J].重庆交通学院学报,2003,22(3):74-81.(GAO Jianping.Chengdu-Chongqing highway analysis of security incidents[J].Journal of Chongqing Jiaotong University,2003,22(3):74-81.(in Chinese))
[2]毛建民,于博,张春学.超速行驶对交通安全的影响及其对策[J].公路与汽运,2009(4):52-54.(MAO Jian-min,YU Bo,ZHANG Chun-xue.Speeding the impact on the traffic safety and its countermeasures[J].Highways &Automotive Applications,2009(4):52-54.(in Chinese))
[3]贺玉龙,卢仲贤,马国雄,等.高速公路直线段车辆稳定运行速度模型[J].公路,2002(10):99-103.(HE Yu-long,LU Zhong-xian,MA Guo-xiong,et al.Speed prediction model of the stable vehicle operation at the high-way line segment[J].Highway,2002(10):99-103.(in Chinese))
[4]高建平,孔令旗,郭忠印,等.高速公路运行车速研究[J].重庆交通学院学报,2004,23(4):78-81.(GAO Jian-ping,KONG ling-qi,GUO Zhong-yin,et al.Study on the speed of highway[J].Journal of Chongqing Jiaotong University,2004,23(4):78-81.(in Chinese))
[5]许金良,叶亚丽,苏英平,等.双车道二级公路纵坡段车辆运行速度预测模型[J].中国公路学报,2008,21(6):31-36.(XU Jin-liang,YE Ya-li,SU Yingping,et al.Speed prediction model on gradient section for two-lane secondary highway[J].China Journal of Highway and Transport,2008,21(6):31-36.(in Chinese))
[6]Schur K S,McCoy P T,Pesti G,et al.Relatioship between design,operating and posted speeds on horizontal curves on rural two-lane highways in nebraska[R].Washington,D C:Transportation Research Record,1796,TRB,National Research Council,2002.
[7]钟小明,刘小明,荣建,等.基于高速公路路线设计一致性的中型卡车运行速度模型研究[J].公路交通科技,2005,22(3):92-96.(ZHONG Xiao-ming,LIU Xiao-ming,RONG Jian,et al.Research on speed models ian of free-flowing truck for alignment design consistency of expressway[J].Journal of Highway and Transportation Research and Development,2005,22(3):92-96.(in Chinese))
[8]邓云朝.公路长大下坡路段小客车运行速度预测模型[J].长安大学学报:自然科学版,2009,29(4):43-47.(DENG Yun-chao.Speed prediction model of freeflowing passenger car on long and steep downgrades[J].Journal of Chang’an University:Natural Science Edition,2009,29(4):43-47.(in Chinese))
[9]Krammes R,Brackett R,Shafer M,et al.Horizontal alignment design consistency for rural two-lane highways[R].Washington,D C:FHWA-RD-94-034.Federal Highway Administration,1995.
[10]Fitzpatrick K,Elefteriadou L,Harwood D,et al.Speed prediction for two-lane rural highways[R].Washington,D C:FHWA-RD-99-171.Federal Highway Administration,1999.
[11]Fitzpatrick K,Wooldridge M D,Krammes R A,et al.Alternative design consistency rating methods for two-lane rural highways[R].Washington,D C:Federal Highway Administration,2000.
[12]钟小明,陈永胜,张杰,等.公路平曲线路段大型车运行速度模型研究[J].公路交通科技,2005,22(12):35-38.(ZHONG Xiao-ming,CHEN Yong-sheng,ZHANG Jie,et al.Research on the model of truckoperating speed on horizontal curve section[J].Journal of Highway and Transportation Research and Development,2005,22(12):35-38.(in Chinese))
[13]Lamm R,Choueiri E M,Hayward J C,et al.Possible design procedure to promote design consistency in highway geometric design on two-lane rural roads[J].Transportation Research Record,Geometric Design and Operational Effect,1989,1195:111-122.
[14]Krammes R A,Brackett R A,Shaffer M A,et al.Horizontal alignment design consistency for rural two-lane highways[M].Washington D C:FHWARD-94-034,1994.
[15]McFadden J,Elefleriadou L.Evaluating horizontal alignment design consistency of two-lane rural highways:Development of new procedure[R].Transportation Research Record,2000,1737:9-17.
[16]张良均,曹晶,蒋世忠.神经网络实用教程[M].北京:机械工业出版社,2008.(ZHANG Liang-jun,CAO Jing,JIANG Shi-zhong.Neural network practical guide[M].Beijing:Machinery Industry Press,2008.(in Chinese))
[17]王栋.山区高速公路直线段和曲线段驾驶人车速控制行为试验研究[J].长沙理工大学学报:自然科学版,2013,10(4):36-40.(WANG Dong.Driving behavior test study of mountainous freeway straight and curve section[J].Journal of Changsha University of Science and Technology:Natural Science,2013,10(4):36-40.(in Chinese))
猜你喜欢
工会博览(2022年5期)2022-06-30
中国交通信息化(2021年2期)2021-07-22
铁道建筑技术(2021年3期)2021-07-21
西部交通科技(2021年9期)2021-01-11
建材发展导向(2019年11期)2019-08-24
装备制造技术(2018年8期)2018-10-17
汽车维护与修理(2018年1期)2018-04-04
作文周刊·小学一年级版(2017年27期)2017-08-10
中国塑料(2015年1期)2015-10-14