
纸基摩擦片送料机械手的设计分析
2014-06-27 05:46李佳雷良育石磊徐菁菁吴双任欢
重庆理工大学学报(自然科学) 2014年3期
李佳,雷良育,石磊,徐菁菁,吴双,任欢
(浙江农林大学工程学院,浙江临安 311300)
纸基摩擦片送料机械手的设计分析
李佳,雷良育,石磊,徐菁菁,吴双,任欢
(浙江农林大学工程学院,浙江临安 311300)
针对目前纸基摩擦片制备时在各工位间传送效率低下的问题,设计了一种旋转式的气缸与手爪相互独立的工件运输机械手,提高了纸基摩擦片的制备效率和质量。为提高摩擦片落料的准确性,在硬件方面利用虚拟样机技术在Adams中对其手爪进行动力学分析和参数优化;在软件方面建立了模糊自适应PID控制器,大幅度改善了中心轴驱动电机的动态性能。
机械手;模糊控制;Adams
湿式纸基摩擦片由湿式摩擦纸和钢制芯片构成,是湿式离合器非常重要的零部件之一[1-2]。其主要功能是保证发动机扭矩的顺利传输以及传输过程中湿式摩擦片和对偶摩擦副的接合平顺,降低摩擦噪声。纸基摩擦片从钢制芯片加工至贴纸完成需要经过涂粘结剂和贴纸基材料2个关键步骤,且这2个工序需要在不同的工作台上完成。这就涉及到摩擦片在2个工作台之间的运送,以及原始钢片的送入和贴片完成后摩擦片的送出。目前,工件的传送还主要靠人工手持操作,效率低下。
西北工业大学设计了一种能够实现摩擦片自动送料的装置[3]。该送料机械手能完成工件的传送,但由于2只机械手只能在气缸作用下做往返运动,空行程占有较大比例,效率提升不明显。因此,本文设计了一种旋转式的机械手,实现了零空行程,从而提高了效率。
1 结构原理
机械手的机构如图1所示。该机械手主体由上下两层机构组成。上层和中心轴与基座保持固定,下层可绕中心轴旋转。气缸和手爪分别固定在机械手的上下两层,以实现气缸和手爪的独立,避免在旋转的过程中连接气缸的气管因机械手旋转出现缠绕。处于压缩状态的弹簧推动滑块使两手指相向运动,直到成功夹持工件结束。当位于机械手上层的气缸轴伸出时,推动前方的滑块压缩弹簧,迫使两手指打开,释放工件。夹持机构采用平面连杆机构实现两手指只在一个方向上对称运动,以保证夹持和释放工件的平稳性。
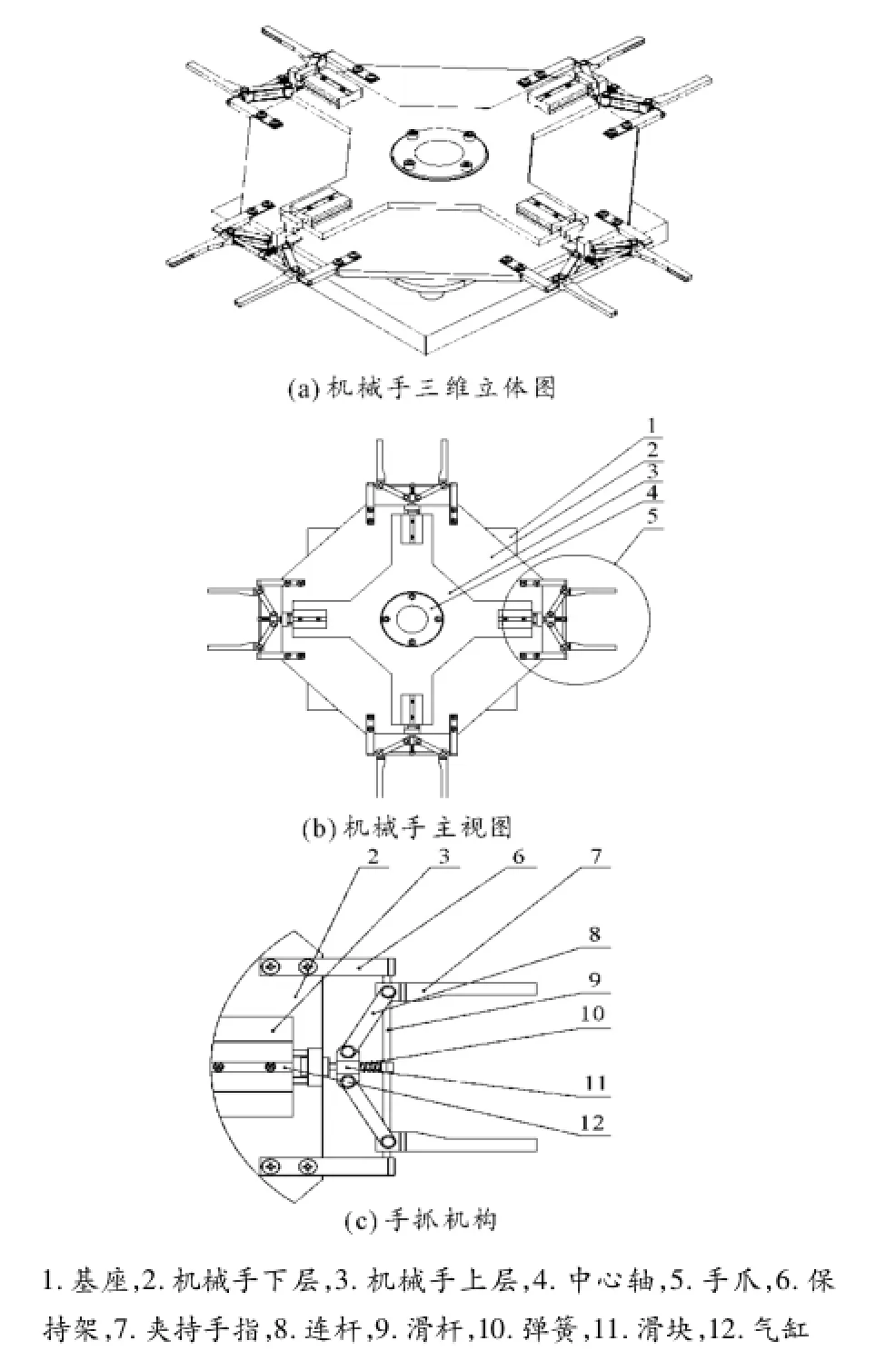
图1 机械手结构
用该机械手进行纸基摩擦片的制备时需要在机械手周围均布4个工作台,分别实现原始钢片的送入、粘接剂的涂抹、纸基的粘贴以及成品的输出。工作示意图如图2所示。工作流程为:初始状态下4气缸打开对应手爪;气缸A和手爪A对应进料工作台,气缸B和手爪B对应涂胶工作台,气缸C和手爪C对应贴片工作台,气缸D和手爪D对应出料工作台;气缸轴缩回,手爪ABC夹持工件;上层机械手和气缸保持不变,4工作台位置固定,机械手与手爪逆时针旋转90°;此时,手爪A移动到气缸B前方,手爪B移动到气缸C前方,手爪C移动到气缸D前方,手爪D移动到气缸A的前方;4气缸轴伸出打开4个手爪完成落料;工件在各个工作台加工;加工完成,4气缸收缩,手爪夹持工件旋转进入下一工作台便可完成工件的传送和连续加工。

图2 工作示意图
2 机械手落料分析
为使机械手能够准确地将工件从一个工位运至另外一个工位,需要从软硬两方面对机械手进行优化。软件方面需要机械手下层能够在伺服电机的驱动下准确地将工件移至对应的工位上方;硬件方面需要机械手爪能够精准落料。
2.1 驱动电机模糊控制
机械手下层在直流伺服电机的驱动下围绕中心轴旋转。要保证精准落料,首先要让机械手下层能够将工件准确地放在指定工作台上方。
2.1.1 直流伺服电机拖动系统数学模型的建立
图3为伺服电机拖动机械手旋转的等效电路图。根据回路电枢电压平衡(式(1))与拖动系统力矩平衡(式(2))可得系统的数学模型(见图3),由此建立系统方框图,如图4所示。

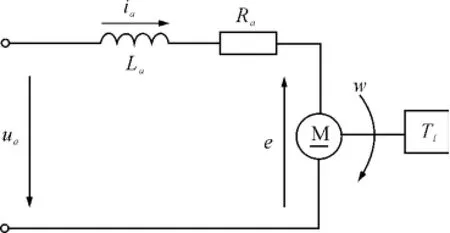
图3 拖动系统数学模型
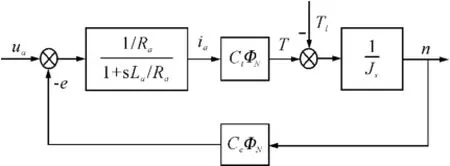
图4 系统方框图
图4中:ua为直流电机电枢电压;ia为直流电机电枢电流;La为直流电机电枢电感;Ra为直流电机电枢电阻;e为直流电机绕组感应电动势;n为直流电机输出转速;ФN为直流电机额定磁通;Tl为负载折算到直流电机端的转矩;J为系统折算到直流电机端的转动惯量。
2.1.2 系统联合仿真
为提高驱动电机的精度,工程中常采用二维自适应模糊PID控制器。以输入误差e和误差变化ec作为模糊推理单元的输入变量,Kp,Ki,Kd为输出变量,其结构如图5所示。
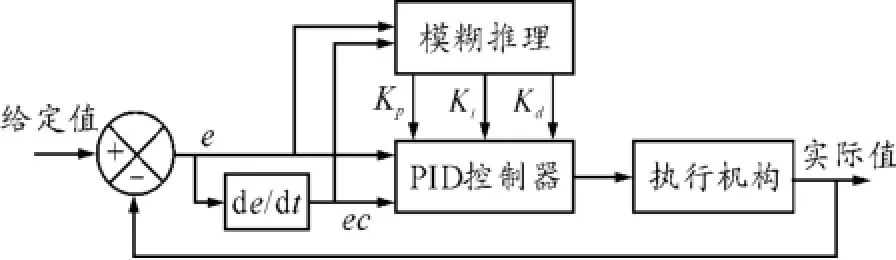
图5 自适应模糊PID控制器结构
为实时反馈机械系统在速度变化时对应的负载,采用Adams-matlab联合仿真[4-6]。在Simulink中建立系统仿真模块如图6所示。仿真所得模糊PID[7]与常规PID控制系统的对比结果见图7。

图6 系统联合仿真模块

图7 常规PID控制和模糊自适应PID控制器仿真曲线
从图7可以看出:模糊PID控制器能够让机械手平稳地达到预期的速度,且能在变化负载情况下维持较高的稳定性。
2.2 手爪优化设计
为使手爪能够准确落料,使用平面连杆机构实现手爪两手指只在夹持工件的方向上运动。利用Adams[8-9]对加持装置的尺寸进行试验研究。由于手爪两手指的运动对称,取其中一手指进行分析。图8为手爪一手指的结构示意图。图中A表示滑块;B表示手指,初始设计尺寸取AC=25 mm,BC=60 mm。为找到最优的A,B点,让A沿AC滑动,B沿BB1滑动。即取AC、BB1为设计变量,利用Adams试验分析B点的位移和速度。试验结果如图9、10所示。
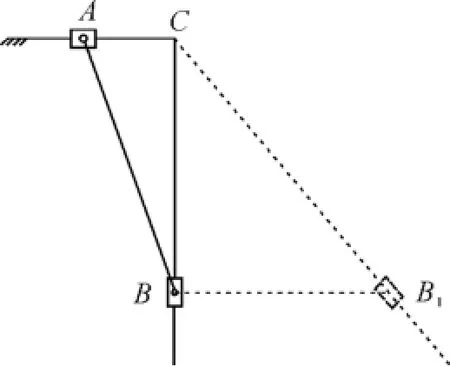
图8 手爪手指结构示意图
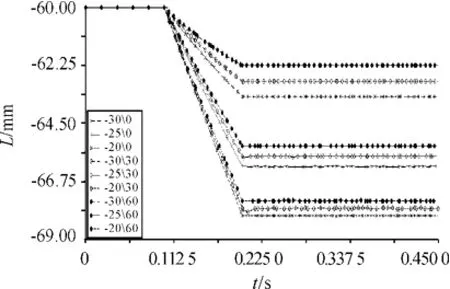
图9 试验研究位移曲线
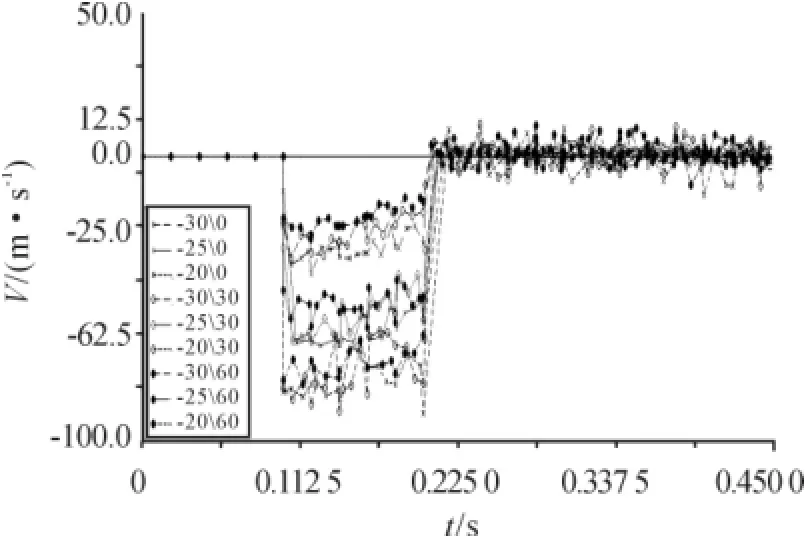
图10 试验研究速度曲线
为使工件能够从机械手爪实现落料,手指位移应大于5 mm。图10显示:当AC=25或者20时,满足要求。为使工件落料精准,手指的打开应尽量平稳。从图10看出:当AC=25 mm,BB1=60 mm时,B点速度平稳。
3 结束语
本文设计的旋转式机械手,通过对驱动电机采用模糊控制器来提高机械手的周向定位精度;运用Matlab和Adams联合仿真实时反馈不同速度下电机轴所带的负载,从而提高了仿真环境的真实性;通过对工件夹持机构进行尺寸优化实现落料平稳。
[1]马卫平.湿式离合器制动器纸基摩擦材料的研究[D].长沙:湖南大学,2007.
[2]张明远.自动变速器用湿式摩擦纸的国产化研究[J].汽车工艺与材料,2012(5):36-43.
[3]郭学平,杨方,齐乐华.纸基摩擦片送料机械手,CN102581840A[P].2012-07-18.
[4]张佳阳,高海涛,郑立熹.直流伺服电机拖动系统的仿真研究[J].中国制造业信息化:学术版,2009,38(8): 44-47.
[5]韩念龙,王家序,王惠,等.水润滑轴承加工上下料系统的自动控制研究[J].机械设计与制造,2013(1): 168-170.
[6]陈运华,高凤岐,王广龙.基于自适应模糊算法的无刷直流电机控制系统研究[J].微电机,2013,45(12):31-35.
[7]陈爱民.模糊控制技术[M].西安:西安电子科技大学出版社,2008.
[8]李增刚.ADAMS入门详解与实例[M].北京:国防工业出版社,2006.
[9]雷刚,樊伟.基于Adams的某车麦弗逊前悬架仿真分析[J].重庆理工大学学报:自然科学版,2011,25(9): 1-5.
(责任编辑 刘舸)
Design of the Feeding Robot of Paper-Based Friction Plate
LI Jia,LEI Liang-yu,SHI Lei,XU Jing-jing,WU Shuang,REN Huan
(School of Engineering,Zhejiang A&F University,Lin’an 311300,China)
For the inefficiency of the manufacture of paper-based friction plate when transferred between each station,a rotary workpiece transferring robot is designed to improve the efficiency and quality of the paper-based friction plate manufacture,on which the cylinder and the gripper are independent.Its gripper dynamic analysis and parameter optimization of virtual prototyping technology in Adams,improve the accuracy of the friction plate blanking in hardware field.Fuzzy adaptive PID controller was made to improve the dynamic performance of the drive motor on the central axis which improves the accuracy of the friction plate blanking in the software field.
robot;fuzzy control;Adams
TH122
A
1674-8425(2014)03-0065-0f4
10.3969/j.issn.1674-8425(z).2014.03.012
2013-11-15
杭州市科技发展计划项目(20130432B34)
李佳(1990—),男,四川人,硕士研究生,主要从事机电一体化研究;通讯作者雷良育(1966—),男,湖北人,博士,教授,主要从事机电检测与控制技术、车辆试验技术、电动技术等方面研究。
李佳,雷良育,石磊,等.纸基摩擦片送料机械手的设计分析[J].重庆理工大学学报:自然科学版,2014 (3):65-68.
format:LI Jia,LEI Liang-yu,SHI Lei,et al.Design of the Feeding Robot of Paper-Based Friction Plate[J].Journal of Chongqing University of Technology:Natural Science,2014(3):65-68.
猜你喜欢
北京汽车(2022年6期)2022-12-30
机械设计与制造(2020年6期)2020-06-20
装备制造技术(2019年12期)2019-12-25
装备制造技术(2019年6期)2019-08-15
模具制造(2019年4期)2019-06-24
模具制造(2019年4期)2019-06-24
电子制作(2018年24期)2019-01-03
荣誉杂志(2017年7期)2017-08-23
汽车零部件(2017年2期)2017-04-07
山东工业技术(2016年15期)2016-12-01
