感应电机模型参考模糊自适应矢量控制系统研究
2014-06-26 05:36:54蒋林应凯
电气传动 2014年4期
蒋林,应凯
(西南石油大学电气信息学院,四川 成都 610500)
1 引言
与传统的感应电机模型参考自适应矢量控制系统相比,基于定子电流模型的模型参考自适应系统(MRASCC)调速范围更广[1-2]。但是该方法中可调模型和磁链观测器含转子时间常数等参数,而转子参数会随电机运行工况发生变化,当转子参数与实际值偏离较大时,会使转子磁链观测不准确,破坏矢量控制系统的磁链和转矩控制的解耦条件,从而影响系统的动、稳态性能[3-4]。因此,对转子参数进行实时在线辨识和调整就显得尤为重要。首先,本文分析了磁链观测器对转子时间常数的敏感性,结合模糊控制器,提出了一个基于定子电流模型的模型参考模糊自适应系统(MRFAS)来在线辨识感应电机转速和转子时间常数,并以此构建了感应电机的无速度传感器矢量控制系统。其次,该系统的转速自适应律采用参数自调整模糊控制方法进行设计。该方法对输入和输出量化因子进行动态调整,实时调整模糊控制论域和控制规则。最后,本文将基于Matlab仿真平台,对基于转子参数辨识的MRFAS矢量控制系统进行仿真实验,并与基于MRASCC的矢量控制系统进行对比分析,验证本文所提控制方法的有效性和正确性。
2 感应电机数学模型
感应电机在两相静止参考坐标系下的数学模型可描述为[5]

其中
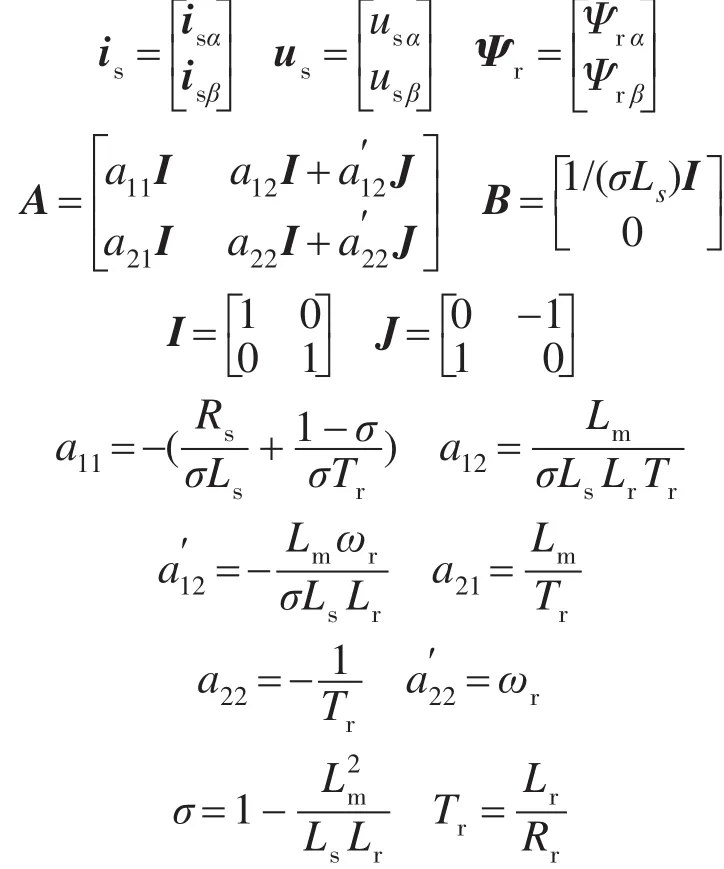
式中:us,is分别为定子电压、电流矢量;Ψr为转子磁链矢量;Rs,Rr分别为定子、转子电阻;Ls,Lr,Lm分别为定子、转子自感和互感;Tr为转子时间常数;ωr为转子转速。
3 磁链观测器参数敏感性分析与MRFAS系统设计
3.1 磁链观测器参数敏感性分析
电流模型磁链观测器可以在全速范围内对磁链进行观测,故本文采用电流模型(IM)来估计转子磁链。为了衡量转子磁链估算值与实际值Ψr之间的误差,构建一个磁链矢量比值函数Φ=/Ψr,以此分析转子时间常数变化时磁链观测器的敏感性[6-7]。将感应电机的电流模型磁链观测器用复数矢量表示如下:

式中:Ψr,is分别为转子磁链矢量和定子电流矢量。
令p=s,则有:

将s=jω1代入式(3),ω1为同步角频率,可得:

所以,转子磁链比值函数为

式(6)表明,转子磁链比值函数包含互感Lm、转子时间常数Tr和转差率ωs3个参数。当系统进入稳态时,转差率主要受负载的影响,因此,该电流模型磁链观测器仅受Lm和Tr误差的影响。实际中,转子时间常数Tr会随电机运行工况发生较大的变化,所以它对磁链观测器的影响也较大。
接下来,分析转子时间常数Tr变化时磁链观测器的敏感性。假设Lm=,式(6)可写为

转子磁链比值函数的频率特性为
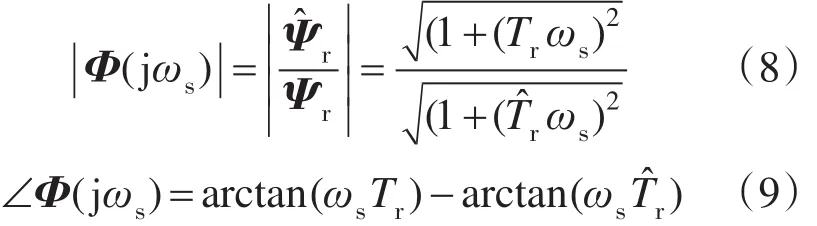
下面分析转子时间常数偏大或偏小时对转子磁链观测的影响,其中转矩与转速是基于额定值的标幺值,当=0.5Tr和=1.5Tr时磁链比值函数与负载转矩和转速的关系,如图1所示。
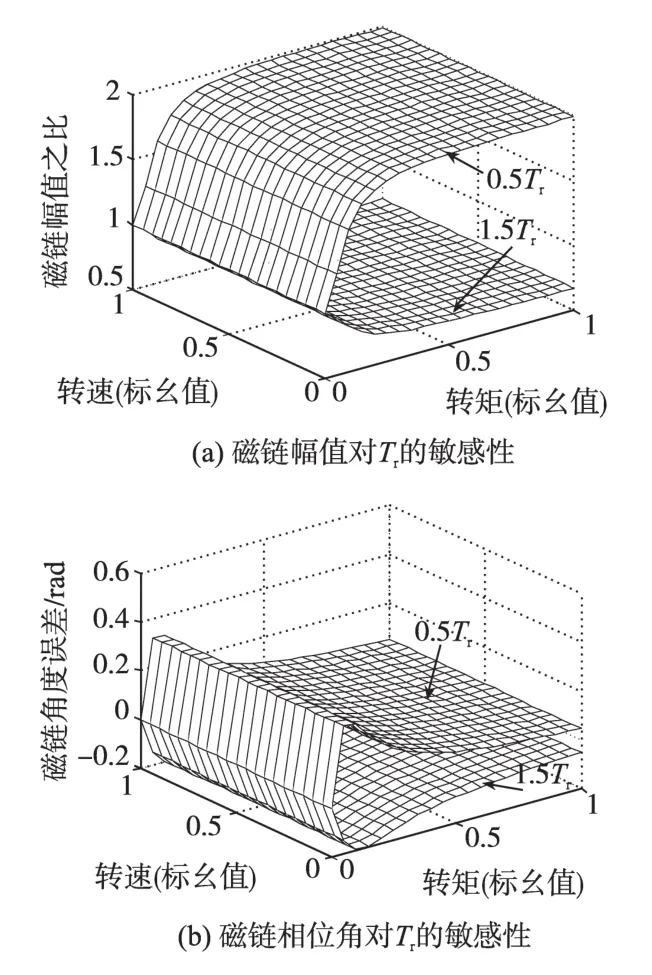
图1 磁链比值函数Ф随转速和负载转矩的变化图Fig.1 Diagram of flux ratio functionФchanged with speed and load torque
3.2 MRFAS系统
基于定子电流模型的模型参考模糊自适应(MRFAS)系统是以感应电机本身为参考模型,以感应电机定子电流状态方程和转子磁链的电流模型共同作为可调模型,以定子电流矢量is作为参考变量,并结合模糊控制构成模型参考模糊自适应机构来辨识转速和转子时间常数。
利用感应电机的定子模型SM(stator model)[1]来估计定子电流:


来估计转子磁链。
显然,感应电机的定子模型和转子磁链的电流模型都与转子角频率ω^r有关,因此将它们共同作为可调模型。设,即转子时间常数倒数,利用Popov超稳定性定理可推导出转速和转子时间常数倒数的自适应律分别为
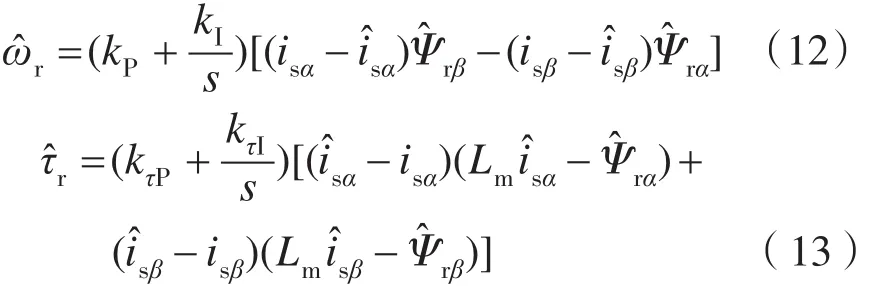
并可以证明此自适应律可使系统渐进稳定[2-4]。然而,PI调节器的控制性能依赖于感应电机精确的数学模型,当电机参数变化时其控制效果会变差。为此,本文提出一种参数自调整模糊控制器来代替传统的PI调节器,并由此构成MRFAS系统,其原理框图如图2所示。该系统不仅具有常规模糊控制器对电机参数依赖性小、鲁棒性强的优点,而且根据输入量的大小,实时调整量化因子及比例因子,提高系统的自适应性和鲁棒性。
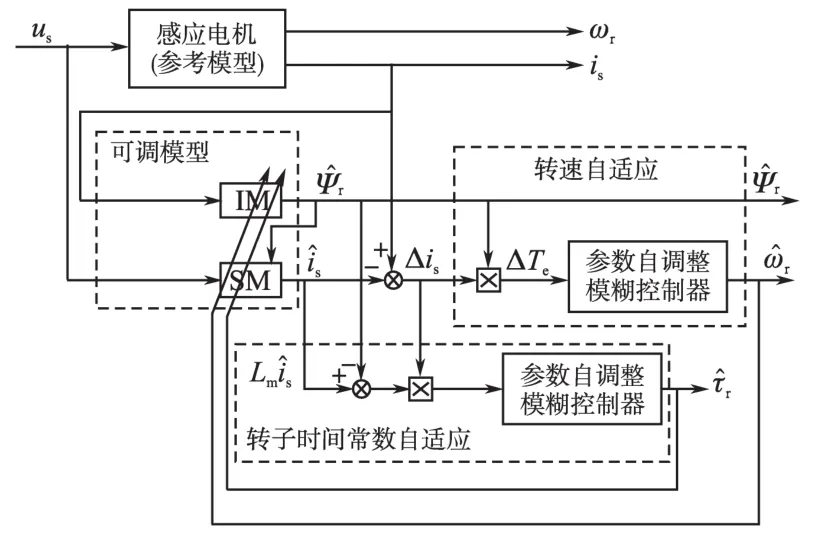
图2 MRFAS系统框图Fig.2 Block diagram of MRFAS system
3.3 参数自调整模糊控制器设计
为了克服常规模糊控制器量化因子固定的缺陷,本文设计了参数自调整模糊控制器,其原理框图如图3所示。它主要包括模糊控制表和参数自调整表的设计,本文采用双输入单输出的模糊控制器,即偏差e和偏差变化率ec作为输入,控制量u作为输出[8]。
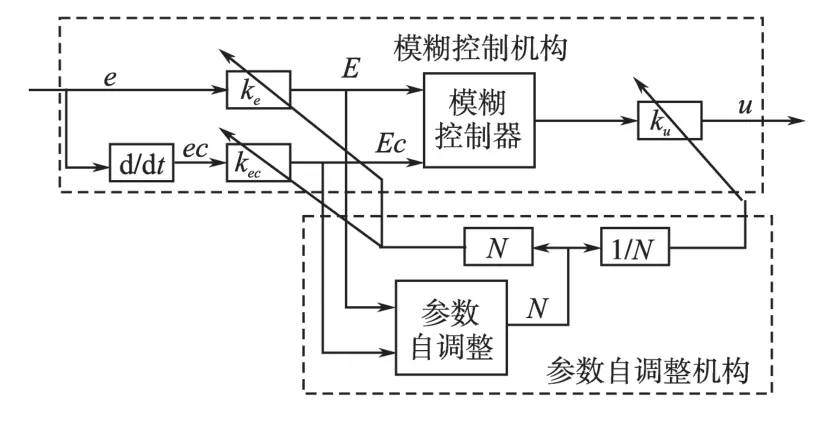
图3 参数自调整模糊控制器结构框图Fig.3 Structure diagram of self⁃adjusting fuzzy controller
设输入量转速偏差ew的论域为[-120,120],其变化率ecw的论域为[-20,20],输出量u的论域为[-6,6],并选取三角形的模糊隶属函数。用语言变量{负大(NB)、负中(NM)、负小(NS)、零(Z)、正小(PS)、正中(PM)、正大(PB)}对变量进行模糊化。模糊控制器输入和输出变量的量化论域都取为{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6},则原始的量化因子分别为:ke=1/20,kec=3/10,ku=1。模糊控制规则选取“if E and Ec then u”的格式,模糊控制规则如表1所示。采用重心法对输出量u进行去模糊化处理,即:
式中:f(uk)为uk处的隶属度。
同理,设转子时间常数倒数偏差eτ的论域为[-0.2,0.2],偏差变化率ecτ的论域为[-0.1,0.1],输出控制量u的论域为[-1,1],则原始量化因子为:ke=30,kec=60,ku=1/6,隶属度函数、模糊控制规则、反模糊化方法都与转速辨识模块选取一样。
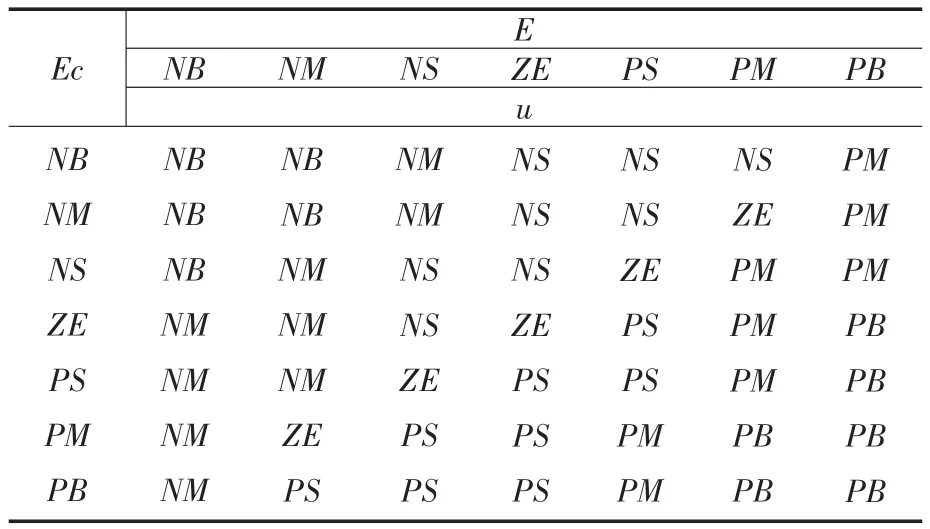
表1 模糊控制规则表Tab.1 The table of fuzzy control rule
模糊控制器的输出量u不仅与前一时刻的E和Ec有关,而且与量化因子ke,kec,ku也相关,但它们之间是一种复杂的非线性关系。众所周知,ke,kec,ku的变化与系统的动、静态特性有关,因此实时调整量化因子ke,kec,ku时要兼顾“粗调”和“细调”,如表2所示。即当e与ec较大时,以系统响应为主,采用“粗调”方法;当e与ec较小时,以考虑系统精度、减小超调量为主,采用“细调”方法[9]。由于ke、kec与ku的趋势是相反的,这里取ke,kec的变化倍数与ku的变化倍数互为倒数关系。
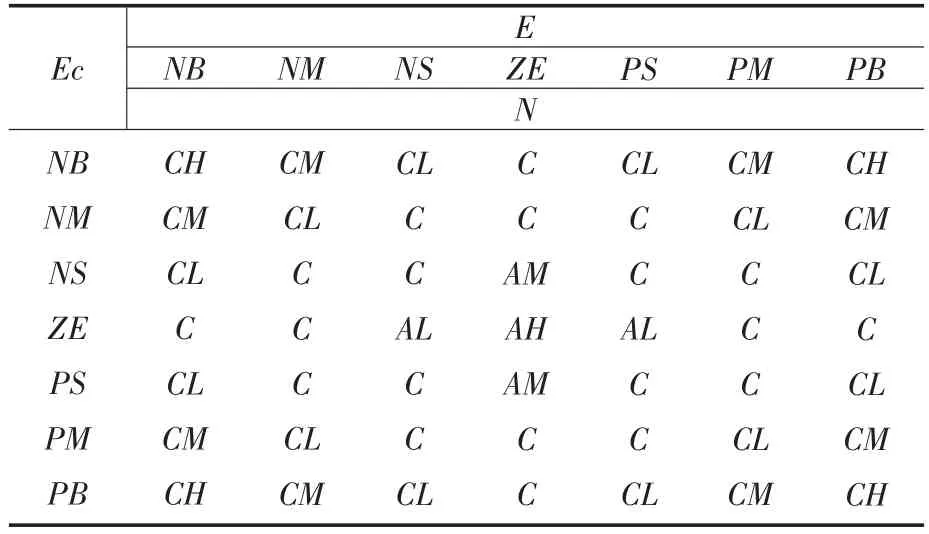
表2 参数调整规则表Tab.2 The table of parameter adjustment rule
模糊控制器的输入量仍为E和Ec,输出量为调节倍数N。偏差及其变化率的论域与控制表的选取相同,输出调节倍数N的论域取为{1/8,1/4,1/2,1,2,4,8},分别对应的语言变量为{CH(高缩)、CM(中缩)、CL(低缩)、C(不变)、AL(低放)、AM(中放)、AH(高放)}。
4 仿真实验及结果分析
4.1 仿真模型及参数设置
基于 Matlab/Simulink仿真平台[8,10],搭建基于MRFAS的感应电机无速度传感器矢量控制系统仿真模型,如图4所示,其中,MRFAS辨识模块的仿真模型如图5所示。
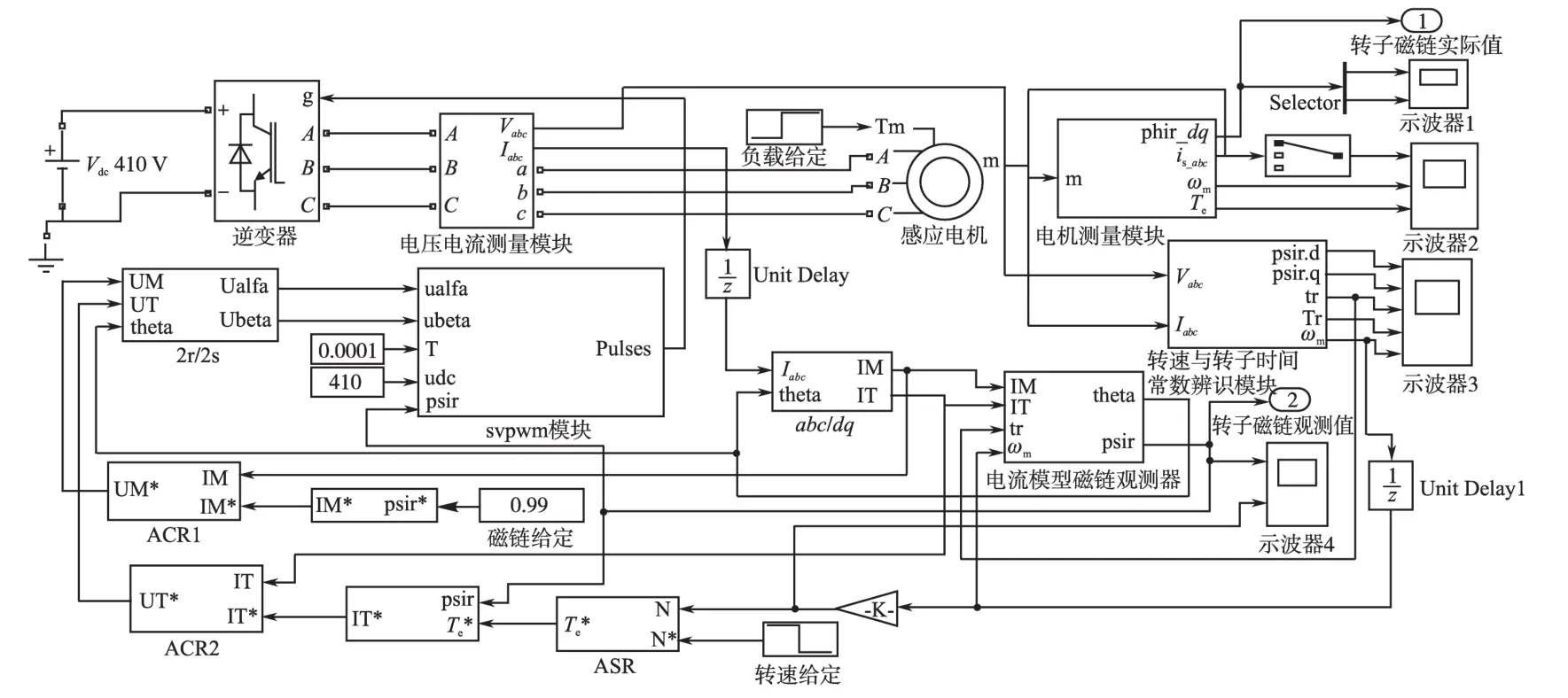
图4 基于MRFAS的感应电机无速度传感器矢量控制系统仿真模型Fig.4 Simulation model of speed sensorless vector control system for induction motor based on MRFAS

图5 基于MRFAS的转子时间常数与转速辨识仿真模型Fig.5 Simulation model of rotor time constant and speed identification based on MRFAS
仿真感应电机参数为:PN=35 kW,UN=380 V,fN=50 Hz,nN=1430 r/min;定子电阻Rs=0.4 Ω,定子自感Ls=0.087 H,转子电阻Rr=0.5 Ω,转子自感Lr=0.088 H,互感Lm=0.085 H,极对数np=2,转动惯量 0.087 kg·m2,阻尼系数 0.001 kg·m2/s;各调节器参数:ASR的参数KP=55,KI=0.1;ACR1和ACR2的参数都为KP=20,KI=5。
4.2 仿真结果及分析
将文献[2,4]中的方法与本文所提方法进行对比分析,在相同条件下的仿真结果分别如图6、图7所示。两种系统从给定转速120 r/min启动,在0.4 s时突加负载10 N·m,0.7 s时负载减为零,1 s时转速降到60 r/min,1.5 s时转速变到-60 r/min。由图7可知,它们在低速时的各种工况下都能够稳定运行,但是文献[2,4]中的MRASCC矢量控制系统的转速和转子磁链观测值都存在一定偏差,突加负载时转速降落较大,转速突变时超调量大且存在一定的稳态误差;而本文的MRFAS矢量控制系统在各种工况下转速和转子磁链的观测值都能很好地跟踪实际值,且突加负载时转速降落较小。
图8为MRFAS矢量控制系统在空载时斜坡转速给定的跟踪响应曲线。由图8可知,本文所提方法具有良好的转速跟踪能力,系统动态响应快,且无超调和稳态误差。
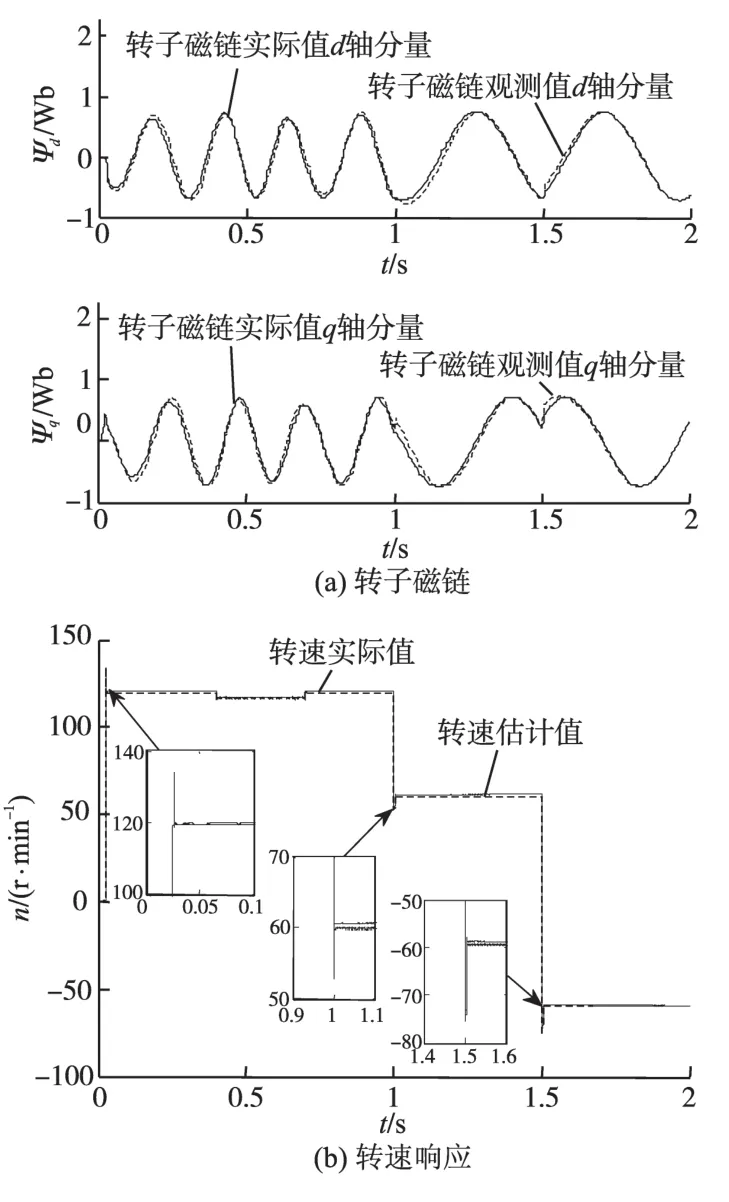
图6 MRASCC矢量控制系统低速时的动态响应Fig.6 The dynamic response of MRASCC vector control system at low speed
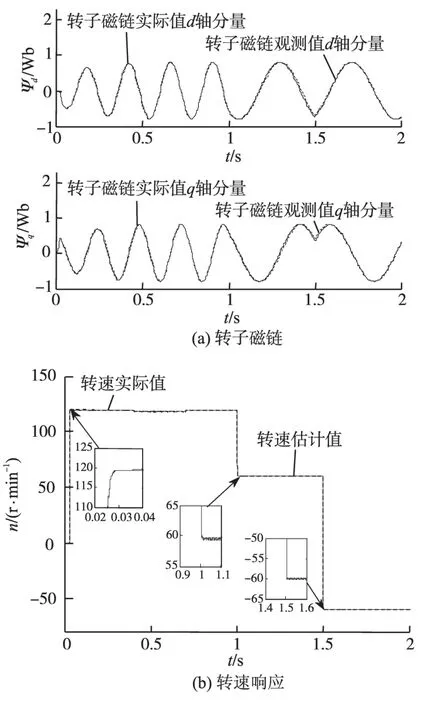
图7 MRFAS矢量控制系统低速时的动态响应Fig.7 The dynamic response of MRFAS vector control system at low speed
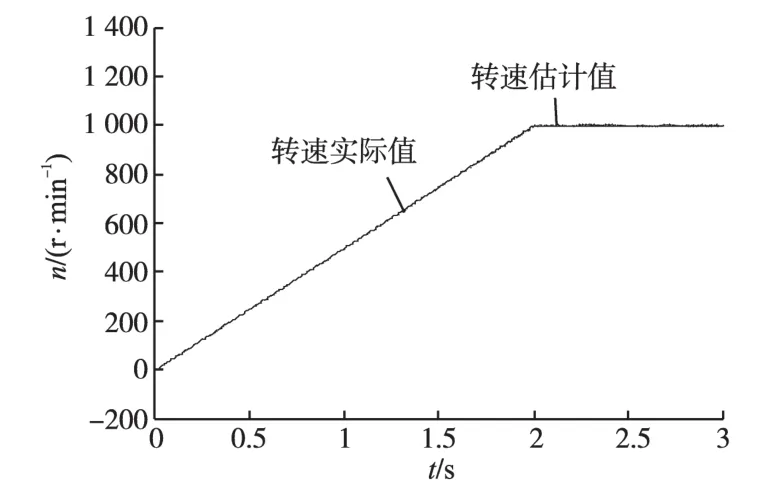
图8 空载条件下转速斜坡响应Fig.8 Ramp responses of motor speed without load
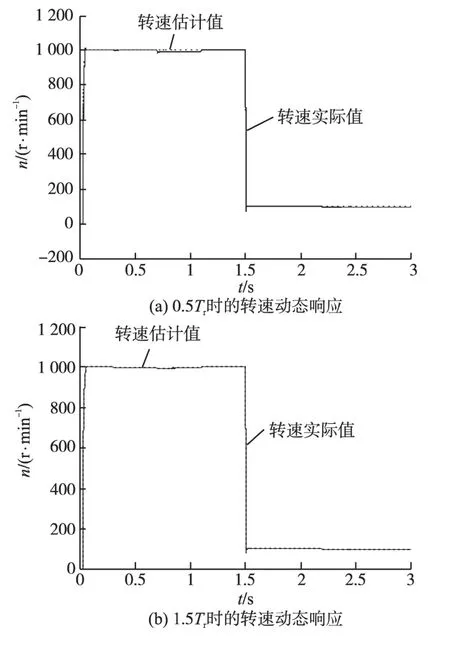
图9 转子时间常数变化时MRFAS矢量控制系统动态响应Fig.9 The dynamic response of the MRFAS vector control system to the rotor time constant′s change
图9是当T^r=0.5Tr和T^r=1.5Tr时,MRFAS矢量控制系统在给定1000 r/min时空载启动,在0.3 s时突加5 N·m的负载,0.7 s时增大到20 N·m,1.1 s时负载突变为0,又在1.5 s时转速突降为100 r/min,1.8 s时再突加5 N·m的负载,2.2 s时增加为20 N·m的动态响应过程。由图9可知,无论是在高速还是在低速,也不管转子时间常数是偏大还是偏小,即使在负载变化时转速观测值都能很好地跟踪实际值,且稳态误差与超调都较小,系统具有较好的自适应性和鲁棒性。
综上所述,带转子参数辨识的MRFAS矢量控制系统对转子参数的变化具有较强的鲁棒性,从而改善了系统的动、稳态性能。其主要原因在于MRFAS矢量控制系统引入了参数自调整模糊控制器,可以动态修正模糊量化因子,结合转子时间常数的在线辨识,就可以实时更新转子时间常数,使得转子磁链观测更加准确,转速也有较好的跟踪性能,降低了该系统对转子参数变化的敏感程度,增强了系统的鲁棒性和自适应性。
5 结论
本文在分析磁链观测器对转子时间常数的敏感性的基础上,设计了参数自调整模糊转速自适应律,并构建了一个基于转子参数在线辨识的感应电机模型参考模糊自适应(MRFAS)矢量控制系统。由于引入了转子参数的在线辨识和参数自适应模糊控制,该系统具有较强的鲁棒性和自适应性,即使转子时间常数随电机运行和负载变化时发生改变,也能够实时辨识和在线调整,从而提高了转子磁链和转速的观测精度,改善了系统动、稳态性能,扩大了调速范围。
[1]Holtz J.Sensorless Control of Induction Machines— with or Without Signal Injection[J].IEEE Transactions on Industrial Electronics,2006,53(1):7-30.
[2]Orlowska⁃Kowalska T.Stator⁃current⁃based MRAS Estimator for a Wide Range Speed⁃sensorless Induction Motor Drive[J].IEEE Transactions on Industrial Electronics,2010,57(4):1296-1308.
[3]Dybkowski M,Orlowska⁃Kowalska T.Low⁃speed Perfor⁃mance of the Stator Current Based MRAS Estimator with FL Controller in the Sensorless Induction Motor Drive[C]//Proc of OPTIM 2008,Brasov,Romania.USA:IEEE,2008:75-80.
[4]马小亮.怎样才能扩展IM无转速传感器VC系统的调速范围[J].电气传动,2011,41(1):3-8.
[5]王焕钢,徐文立,杨耕.感应电机无速度传感器控制的自适应转速估计[J].电气传动,2002,32(1):6-9.
[6]Benoît R,Bruno F,Philippe D,et al.Vector Control of In⁃duction Machines:Desensitisation and Optimisation Through Fuzzy Logic[M].New York :Springer,2012.
[7]罗慧.感应电机全阶磁链观测器和转速估算方法研究[D].武汉:华中科技大学,2009.
[8]李士勇.模糊控制[M].哈尔滨:哈尔滨工业大学出版社,2011.
[9]方力,李宏胜,张建华.比例因子自调整模糊神经网络SRM控制研究[J].电气传动,2011,41(12):54-60.
[10]洪乃刚.电力电子和电力拖动控制系统的Matlab仿真[M].北京:机械工业出版社,2006.
猜你喜欢
成都信息工程大学学报(2021年6期)2021-02-12 03:00:52
重型机械(2019年3期)2019-08-27 00:58:52
测控技术(2018年10期)2018-11-25 09:35:52
广东石油化工学院学报(2016年3期)2016-05-17 05:17:10
电测与仪表(2016年10期)2016-04-12 00:26:38
电源技术(2016年2期)2016-02-27 09:04:56
华东理工大学学报(自然科学版)(2015年2期)2015-11-07 09:16:20
华东理工大学学报(自然科学版)(2015年2期)2015-11-07 09:16:20
物探化探计算技术(2014年1期)2014-06-27 01:32:50
电测与仪表(2014年23期)2014-04-04 12:08:30