高速公路汽车追尾碰撞预警关键参数估计
2014-06-23 13:52张为公
哈尔滨工程大学学报 2014年9期
宋 翔,李 旭,张为公
(东南大学 仪器科学与工程学院,江苏 南京210096)
高速公路汽车追尾碰撞预警关键参数估计
宋 翔,李 旭,张为公
(东南大学 仪器科学与工程学院,江苏 南京210096)
为准确、可靠获取高速公路汽车追尾预警算法的关键参数,提出一种基于车辆相对运动典型工况的估计方法。根据高速公路车辆不同的相对运动典型工况建立多个卡尔曼滤波系统状态模型,以全球定位系统与车车通信信息结合雷达信息作为观测量,并在运行过程中检测、容忍传感器信息的不准确甚至失效,利用交互多模型算法,实时、准确、可靠的获取两车相对距离、速度、加速度以及碰撞时间等关键参数。仿真及实车试验结果表明,估计方法具有精度高、鲁棒性和适应性好的优点,且在传感器失效的情况下依然能取得较好的估计效果。
追尾碰撞;参数估计;交互多模型;卡尔曼滤波;车车通信;全球定位系统;毫米波雷达;传感器失效容忍;距离碰撞时间
统计资料表明,车辆的追尾碰撞事故是高速公路上最主要的事故形态,其预警系统的研究也因此引起了世界各国的重视,环境感知与预警算法是其中的2项关键技术。
在环境感知方面,雷达[1]、红外[2]、机器视觉[3]等技术被广泛研究和应用。毫米波雷达[4]最为常用,性能也最为优良,但所测信息噪声较大,易受恶劣天气、电磁波等影响,难以有效区分干扰目标,且无法获取车辆间相对加速度信息。近年来,国外很多学者对基于全球定位系统与车车通信[5-7](GPSV2V)的防追尾碰撞技术进行了研究,该技术所获取信息较为全面、准确,且不受天气、干扰目标等影响,但其有效性取决于GPS和车车通信所传递信息的准确可靠,若GPS受到遮挡,或因车车通信受到干扰而被屏蔽或延时,则会导致信息的不准确甚至无法获取,同时车车通信并未普及,很多车辆并不具备该功能。
碰撞时间(time to collision,TTC)是追尾碰撞预警算法[8]中的一个关键参数与指标,国内外的TTC值计算[9]方法忽略了相对加速度,导致计算结果误差较大,影响预警的准确性。同时,为滤除观测噪声,卡尔曼滤波[10]、粒子滤波[11]等滤波方法被广泛应用,近年来,交互多模型(IMM)[12-13]机动目标跟踪算法也被应用于此,进一步减小了测量误差,但所采用的模型未考虑高速公路车辆相对运动的典型工况,准确性不足,也无法对故障或失效传感器信息有效处理和容忍,影响算法的可靠性。
基于此,本文提出一种高速公路汽车追尾碰撞预警关键参数估计方法,针对车辆相对运动的不同典型工况建立多个模型,利用IMM算法,融合雷达和GPS-V2V信息,实时、准确、可靠获取两车相对距离、速度与加速度等关键参数,并结合相对加速度信息来改进传统 TTC算法,以准确、可靠地估计出TTC这个预警关键参数。
1 系统传感器配置及算法构架
1.1 传感器特性
采用毫米波雷达、GPS、加速度计,结合V2V以提供观测信息。毫米波雷达提供包含较大噪声的两车相对距离与速度,一般不会完全失效。GPS与加速度计提供自车位置、车速与加速度信息,V2V作提供前车的位置、车速与加速度信息,GPS-V2V信息较为全面准确,但GPS信号受到遮挡或V2V无法传输信息时会导致无法提供有效的前车信息。
V2V发生故障或失效的表现为无前车信息信号,很易判别,GPS信号是否发生故障或失效则可利用水平精度因子(horizontal dilution of precision,HDOP)值结合卫星数来判别,在HDOP<5时且卫星数大于等于4个时,判定为GPS正常工作,否则判定GPS失效。
基于此结合GPS-V2V与雷达的优缺点,当传感器都工作正常时,以GPS-V2V与加速度计及信息作为观测量,当车车通信失效而GPS能正常工作时,以GPS、加速度计及雷达信息作为观测量,当GPS失效时,以加速度计及雷达信息作为观测量。
1.2 算法构架
所提出的关键参数估计算法如图1。
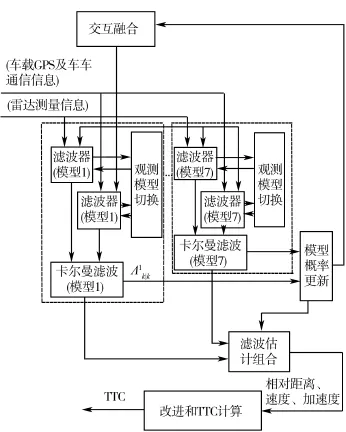
图1 估计方法框图Fig.1 Flowchart of estimation method
2 车辆状态模型设置
2.1 系统状态方程
车辆运动状态采用离散时间多模型表示:

式中:k表示离散化时刻;下标j表示第j个模型;状态向量 X=[d vLaLvFaF]T;W 为系统白噪声,其协方差矩阵为Q;A表示状态转移矩阵;d为前车距自车的距离;VL、aL为前车速度与加速度;VF、aF为自车速度与加速度。
2.2 多模型设置
针对高速公路车辆运行及发生追尾碰撞的典型场景和工况进行分析,定义如下6种较为普遍的追尾碰撞危险工况,为简化模型,假定自车与前车行驶在同一直线上:
工况1:前车静止,自车匀速行驶;
工况2:前车静止,自车加速行驶;
工况3:前车匀速行驶,自车以大于前车速度的车速匀速行驶;
工况4:前车匀速行驶,自车加速行驶;
工况5:前车减速行驶,自车匀速行驶;
工况6:前车减速行驶,自车加速行驶。
除此之外,还考虑高速公路上常见安全状态:
工况0:自车以等于前车的速度匀速行驶;
工况7:自车以小于前车的速度匀速行驶;
工况8:前车加速行驶,自车匀速行驶;
工况9:前车匀速行驶,自车减速行驶。
可见工况7、8、9的状态转移矩阵等同于工况3、5、4,因此仅对工况0~6进行分析即可。采用7个卡尔曼模型来描述上述7种工况,即j=1,2,…,7,分别代表工况0~6,计算其状态转移矩阵A1-A7。以A1为例,有:

2.3 观测方程
第j个滤波器的观测方程为

式中:Z为观测向量,H为观测矩阵,Z与H根据传感器实时状态进行切换如图2所示;V是与W互不相关的观测噪声向量,其协方差矩阵为R。

图2 观测量切换框图Fig.2 Flowchart of observations switching
图2中,dGPS-V2V为由GPS及V2V所计算的车间距离,dradar和vr-radar为雷达所观测的车间距离与前车相对于自车的速度,vL-V2V和aL-V2V为V2V所传输的前车速度和加速度,vF-GPS为 GPS所观测的自车速度,aF-ACC为加速度计所观测的自车加速度。
3 基于IMM的改进TTC估计方法
针对上述典型工况,建立7个卡尔曼滤波模型,模型之间的转移概率用一个马尔科夫链来表示:

式中:m(k)是系统模型;pij是转移概率,下标i、j表示从状态i转移到状态j的概率。
3.1 交互估计计算
预测第j(j=1,2,3,…,7)个模型的模型概率ρj(k,k-1):

预测混合概率ρi|j(k-1):

则可计算出交互估计后第j个滤波器在k时刻的输入X0j(k-1)与估计误差方差阵P0j(k-1)。
3.2 模型条件滤波
每个滤波器各自进行卡尔曼滤波递推,可根据标准卡尔曼滤波递推过程进行,包括时间更新和测量更新两个过程,从而递推出第j个模型滤波器的状态估计Xj(k)与估计误差方差阵Pj(k)。
3.3 模型概率更新
在每个模型完成上一步的更新之后,利用最大似然函数Λj(k)计算新的模型概率ρj(k),最大似然函数计算如下:

式中:Dj(k)与Sj(k)分别为模型条件滤波中所计算出的第j个模型k时刻的残差与协方差,由贝叶斯定理给出第j个模型在k时刻的模型概率ρj(k):

式中:ρj(k-1)为第j个模型在k-1时刻的模型概率。
3.4 估计组合
在计算出各模型为正确的后验概率之后,对所有滤波器的状态估计进行概率加权并求和,权系数为模型正确的后验概率,得到最终的状态估计为

据此即可推算出最终的两车相对距离、速度和加速度估计,即车辆间相对距离d可直接估计得出,前车相对于自车的速度vr=vL-vF,前车相对于自车的加速度ar=aL-aF。
3.5 改进TTC算法
传统的TTC计算方法为当前两车相对距离除以相对速度,该方法忽略了车辆间相对加速度,存在较大的误差,从而影响预警效果。在此基础上考虑相对加速度信息进行改进:

解式(9)可得
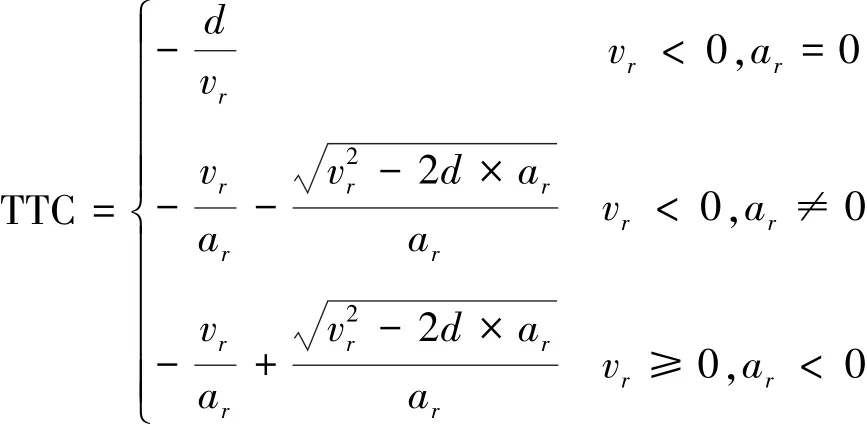
将估计出的d、vr、ar值代入即可实时计算出TTC值,且当或 vr≥0,ar≥0时,式(2)无解,此时不予计算TTC值。
4 仿真及试验分析
4.1 仿真验证与分析
设置高速公路上典型工况对本文算法进行验证,应注意的是,若存在全面准确的V2V信息,则本文算法所需的所有信息均可实时准确获取,无法验证本文算法的鲁棒性,因此,在仿真试验中,假设无法获取V2V信息。仿真工况1设置为:时长10 s,0~5 s内,自车与前车以相同的速度匀速行驶,5~10 s内前车加速,自车加速。对两车距离的估计结果如图3所示,并与利用单卡尔曼滤波器所估计结果进行比较。

图3 工况1车间距离估计结果Fig.3 The estimation results of distance 1
图3中可见本文多滤波器方法的估计结果优于单滤波器的估计结果,这是由于常规卡尔曼滤波器在使用时,其结构保持不变,在车辆运行工况发生改变而不符合设定模型时会产生较大的误差。图4为各典型工况对应概率,可见,在0~5 s内,符合工况3,因此工况3所对应的的模型概率为最大,5~10 s,符合工况6,因此,工况6对应的模型概率为最大。

图4 工况1模型概率Fig.4 Models probability 1
图5为前车车速与加速度的估计结果,虽然无车车通信信息,但依然取得了较好的估计效果。

图5 前车车速与加速度估计结果Fig.5 The estimation results of speed and acceleration
仿真工况2设置为:仿真时长为15 s,0~10 s内,自车与前车都匀速行驶,且自车大于前车的车速,10~15 s内,前车依然匀速行驶,自车加速行驶,其中设定第8~12 s GPS因遮挡而失效,此时,仅靠雷达与加速度计获取观测信息,车距如图6所示。图中可见依然能够取得较好的估计效果,图7为各典型工况对应概率,可见,在0~10 s内,符合工况3,因此工况3所对应的的模型概率为最大,10~15 s,符合工况4,因此,工况4对应的模型概率为最大。

图6 工况2车间距离估计结果Fig.6 The estimation results of distance 2

图7 工况2模型概率Fig.7 Models probability 2
4.2 实车试验验证
针对本文所提出的方法进行实车试验验证,采用毫米波雷达获取相对距离与相对车速,GPS获取车速信息,陀螺仪获取车辆加速度信息,利用基于PC104的工控机实时同步采集信息,采样频率为10 Hz,试验车辆及传感器如图8所示。

图8 试验车辆及传感器Fig.8 Test vehicle and sensors
实车试验时长50 s,结果如图9所示,图中,由于试验条件所限,无法获取V2V信息,但依然取得了较好的估计效果,验证了方法的鲁棒性。与传感器测量值或计算值相比较,滤波后的车速与距离信息更为平滑,有效的滤除了直测信息所含的毛刺和噪声信息,误差小,准确性高,以自车加速度为例,其滤波后值更为符合自车车速的变化趋势。其中,前车的加速度信息无测量值进行比较,但可以看出,其与前车车速的变化趋势相吻合,具有较高的准确性。试验中各种工况交替出现,而模型概率也很好的体现了这一点,说明了本方法的适应性较好,能够适应不同的行驶工况。

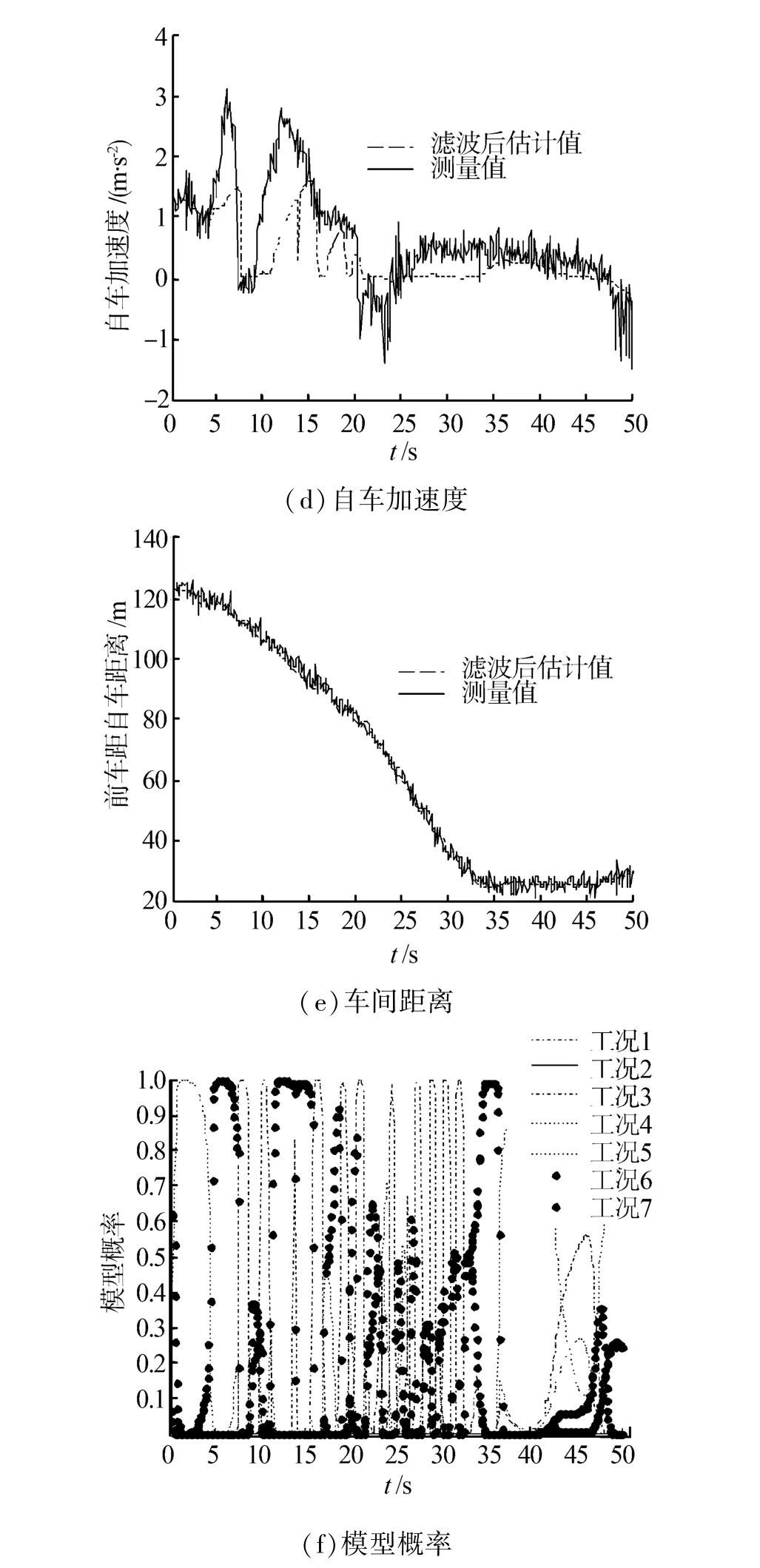
图9 试验结果Fig.9 Trial results
4.3 改进TTC算法验证
对上述仿真工况1与实车试验分别计算TTC值,图10为传统方法所计算TTC值,图11为改进方法计算TTC值。可见,利用传统TTC方法进行计算,当两车车速较为接近时,计算值往往较大,不符合实际情况,事实上此时,若两车较为接近,也是较为危险的工况,而利用改进方法计算TTC值则有效避免了该状况。以实车试验为例,假设预警阈值为10 s(以灰色虚线表示),传统方法所计算TTC值忽略了相对加速度即车辆间相对运动趋势,所计算TTC值高达1 000 s,远远偏离了实际状况,产生了大量漏警,而利用改进方法计算的TTC值在30 s之内,符合实际状况,避免了漏警和虚警。第6~8 s中,自车与前车减速行驶,且前车减速度大于自车减速度,但自车车速暂小于前车车速,此时为较为危险的工况,若利用传统方法计算,忽略了相对加速度信息,则判定为无需报警,而利用改进方法计算值小于报警阈值10 s,有效避免了漏警。

图10 传统方法TTC估计结果Fig.10 TTC estimate results of traditional methods


图11 改进方法TTC估计结果Fig.11 TTC estimate results of improved methods
5 结论
仿真及试验结果表明,本文所提出的算法能够较好地估计出追尾碰撞预警所需的关键参数,具有精度高、鲁棒性好、实时性好、适应性好等优点。
1)该方法针对高速公路车辆不同的相对运动典型工况提出,利用交互多模型算法实现不同工况模型间的交互,能够保证在不同工况下对于高速公路追尾碰撞预警关键参数估计的准确性和适应性。
2)充分利用GPS与V2V信息结合雷达信息来建立滤波系统的观测量,并考虑到V2V技术尚未成熟,且GPS存在因遮挡而失效状况,根据传感器实时状态进行切换,在运行过程中检测、容忍传感器信息的不准确甚至失效,保证个别传感器失效时依然能取得较好的估计效果,从而保障关键参数估计的可靠性和鲁棒性。
3)结合相对加速度信息,对传统TTC估计方法进行改进,能够更为准确、可靠地估计出TTC这个高速公路追尾碰撞预警关键参数。
[1]PARK S,HWANG J P,KIM E,et al.Vehicle tracking using a microwave radar for situation awareness[J].Control Engineering Practice,2010,18:383-395.
[2]WENDER S,DIETMAYER K.3D vehicle detection using a laser scanner and a video camera[J].IET Intelligent Transport Systems,2008,2(2):105-112.
[3]SIVARAMAN S,TRIVEDI M M.A general active-learning framework for on-road vehicle recognition and tracking[J].IEEE Transactions on Intelligent Transportation Systems,2010,11(2):267-276.
[4]PARK S,HWANG J P,KIM E,et al.A neural network approach to target classif i cation for active safety system using microwave radar[J].Expert Systems with Applications,2010,37:2340-2346.
[5]CHANG B R,TSAI H F,YOUNG C P.Intelligent data fusion system for predicting vehicle collision warning using vision/GPS sensing[J].Expert Systems with Applications,2010(37):2439-2450.
[6]RAFAEL T M,MIGUEL A Z.Collision avoidance support in roads with lateral and longitudinal maneuver prediction by fusing GPS/IMU and digital maps[J].Transportation Research Part C,2010,18:611-625.
[7]TALEB T,BENSLIMANE A,LETAIEF K B.Toward an effective risk-conscious and collaborative vehicular collision avoidance system[J].IEEE Transactions on Vehicular Technology,2010,59(3):1474-1486.
[8]CHANG T H,HSU C S,WANG C,et al.Onboard measurement and warning module for irregular vehicle behavior[J].IEEE Transactions on Intelligent Transportation Systems,2008,9(3):501-513.
[9]JANSSON J,GUSTAFSSON F.A framework and automotive application of collision avoidance decision making[J].Automatica,2008(44):2347-2351.
[10]EDELMAYER A,MIRANDA M,NEBEHAJ V.Cooperative federated f i ltering approach for enhanced position estimation and sensor fault tolerance in ad-hoc vehicle networks[J].IET Intelligent Transport Systems,2009,4(1):82-92.
[11]GUSTAFSSON F,GUNNARSSON F,BERGMAN N,et al.Particle filters for positioning,navigation and tracking[J].IEEE Transaction on Signal Processing,2002,50(2):425-437.
[12]刘扬,闫新庆,国强.基于多因素模糊判决的多模型机动目标跟踪[J].哈尔滨工程大学学报,2014,35(5):630-636.
LIU Yang,YAN Xinqing,GUO Qiang.The multi-model method of maneuvering target tracking based on multi-factor fuzzy synthetic evaluation[J].Journal of Harbin Engineering University,2014,35(5):630-636
[13]RODRIGUEZ S A,FREMONT V,BONNIFAIT P,et al.An embedded multi-modal system for object localization and tracking[J].IEEE Intelligent Transportation Systems magazine,2012,4:2-14.
Estimation of key parameters of highway rear-end collision warning
SONG Xiang,LI Xu,ZHANG Weigong
(Department of Instrument Science and Engineering,Southeast University,Nanjing 210096,China)
In order to obtain key parameters of highway rear-end warning accurately and reliably,an estimation method is proposed based on typical relative movement working condition of vehicles.According to the different vehicle relative movement conditions on the highway,the multiple Kalman filtering system state models are established.Combining the global positioning system,vehicle-to-vehicle communication information and radar information as observational variables,the key parameters,such as relative distance,relative velocity,relative acceleration and TTC(time to collision),are accurately and reliably acquired in real time by using interacting multiple models algorithm.Moreover,the inaccurate and invalid information of sensors is detected and tolerated in this method.The simulation and trial results show that the estimation method has advantages of high accuracy,good robustness and strong adaptability.In addition,the high-quality estimation results can still be obtained even in the case of sensor malfunctions.
rear-end collision;parameters estimation;interacting multiple model;Kalman filtering;global positioning system;microwave radar;vehicle to vehicle communication;sensor failure tolerance;time to collision
10.3969/j.issn.1006-7043.201404090
TP273
A
1006-7043(2014)09-1142-07
http://www.cnki.net/kcms/doi/10.3969/j.issn.1006-7043.201404090.html
2013-04-26. 网络出版时间:2014-09-04.
国家自然科学基金资助项目(61273236);教育部博士点基金资助项目(200802861061);江苏省自然科学基金资助项目 (BK2010239);江苏省博士后科研基金资助项目(1401012C).
宋翔(1984-),男,博士后;李旭(1975-),男,副教授,博士生导师.
宋翔,E-mail:sx2190105@163.com.
猜你喜欢
当代水产(2022年6期)2022-06-29
汽车观察(2018年12期)2018-12-26
装备制造技术(2018年8期)2018-10-17
金桥(2018年4期)2018-09-26
劳动保护(2018年8期)2018-09-12
汽车维护与修理(2018年1期)2018-04-04
汽车工程(2017年8期)2017-09-15
作文周刊·小学一年级版(2017年27期)2017-08-10
人民交通(2016年9期)2016-06-01
汽车维护与修理(2015年5期)2015-02-28