带支腿浮式结构水动力建模及波浪力分析
2014-06-23 13:52黄亚新武海浪陈徐均
哈尔滨工程大学学报 2014年9期
黄亚新,武海浪,陈徐均
(解放军理工大学野战工程学院,江苏南京210007)
带支腿浮式结构水动力建模及波浪力分析
黄亚新,武海浪,陈徐均
(解放军理工大学野战工程学院,江苏南京210007)
为研究海上多腿浮式结构在收放桩腿的过程中水动力特性的变化规律,对某风电安装船结构进行了合理简化,使用有限元方法建立了多腿支撑结构的水动力模型,按水下桩腿长度的不同对结构划分了5种工况,探讨了船身、桩腿、桩靴的湿面单元划分,以所建模型为基础数值分析了水下桩腿长度对结构所受波浪激励力的影响,给出了结构所受波浪激励力(矩)与波浪频率的关系。结果表明:水下桩腿长度对受力、力矩的影响体现在波浪处于中频段;桩腿对引起垂荡的波浪激励力和引起纵摇的波浪激励力矩的影响不大,引起横摇的波浪激励力矩影响较大。
海洋工程;带支腿浮式结构;有限元建模;湿面;波浪激励力
海上风力发电已经成为世界新能源发展的热点,出现了专用的海上风电设备安装平台[1]。安装平台通常为多腿支撑结构,可以分为非自航式和自航自升式2种。非自航式平台一般配备了4~8个桩腿,由于不具备自航能力,需由拖船拖行,到达现场后,通过液压升降装置可以调整桩腿插入海底,使船体完全或部分露出水面,如A2SEA公司的Sea Jack号就是一艘专门为海上风机安装而建造的非自航式多腿支撑平台;而自航自升式平台具备一定的航速和操纵性,由自身推进系统航行至作业海域后,利用动力定位系统与推进器配合完成精确定位,然后将桩腿放下,使船身抬升为海洋工作平台,不需要拖航,可以单独完成海上作业任务。如英国 MPI Offshore公司的“MPI Resolution”是世界上第一艘专门为海上风机安装而制造的特种船舶[2]。
国内外学者对这种多腿支撑结构所涉及的各方面问题给予了较多关注,比较有代表性的有:风电安装船防碰撞、倾覆的风险评估体系建模[3];风电安装船特种钢材性质分析[4];各类风电安装船的性能和经济效益对比分析[5];关键部位的有限元建模及在环境载荷作用下的强度及承载力分析[6-10];风电安装船升降系统的齿轮设计[11]等。
事实上,桩腿与船体相连,收放缓慢,以某型安装船为例,其桩腿最快提升速度为1 m/min,完成一次收放时间需要2 h左右。在这样长的一段时间中,船体处于带桩腿漂浮或者慢速航行状态,会在波浪的作用下产生摇荡运动和漂移,这必将影响安装船到场后的精确定位和转场的效率。另外,桩腿的收放不断地改变着平台的自身属性,如:重心、转动惯量、水面以下船体外型,从而船的水动力特性必然随之改变。因此研究带支腿浮式结构的水动力问题既有现实的保障意义也有一定的理论意义,本文即针对这一问题重点讨论带支腿浮式结构的水动力建模,并以所建模型为基础分析了水下桩腿长度对结构所受波浪激励力的影响。
1 计算原理及水动力建模
1.1 计算原理
根据三维势流理论,当船舶没有航速地在自由面上作摇荡运动时,对于一阶近似,场内速度势要满足拉普拉斯方程和边界条件都是线性的,可以应用迭加原理把速度势φ加以分解[12-13]:

式中:φI、φD分别代表入射波和绕射波势,φj代表第j个模态的辐射势。
若入射波是单向规则波,则在入射波场内任意一点(x,y,z)处的入射波势φI可表示为

式中:k为波数,H为水深,ω0为波频率。
绕射波势φD和辐射势φj在流场内满足拉普拉斯方程:

拉普拉斯方程可由响应的边界条件求解:

式中:[SF]为自由面条件、[S]为物面条件、[SB]为底部条件和 [S∞]为无穷远处辐射条件;r=为外辐射波边界;nj表示物面上某点的广义法向矢量。
可利用格林函数法求解[12],以辐射势为例,经开拓后场内任一点P的速度势可按源分布表示为

式中:σ(Q)为源强分布密度;G(P,Q)为格林函数,应由物面条件决定。决定源强σ(Q)的积分方程为
通常,积分方程(7)可以在离散化后,化成代数方程求解。离散化的一种方法是将物面S0分成N块面元,设每一块面元上分布等强度的源,即在标号为n(n=1,2,…,N)的面元上,σn为常数。并且在每一块面元上选控制点Pn,在这些离散的控制点上满足边界条件,于是积分方程离散为一组线性代数方程组,表示为

式中:nj为单位法线矢量对应于j阶模态运动的分量所组成的N阶列阵。由上线性代数方程组可求得源强σ(Q),将结果代入式(6)即可得到场内任一点P的速度势。因此,物面的离散化是求得场内速度势的一个重要步骤。
同理,绕射势φD也可用同样的方法求得,只要选择合适的格林函数 G(P,Q)=G(x,y,x;ξ,η,ζ)使之满足一定的条件,则场内的速度势就可由这一格林函数在物面S0上的分布来确定。
在已知入射波势φI和求得绕射波势φD后,即可根据式(9)求得平台在波浪运动中受到波浪激励力,即为佛汝德-克雷洛夫力和波浪绕射力作用在船体上的合力:

式中:S为湿表面,ni为广义法向矢量。
1.2 船体本型参数
选取某型风电安装平台[1]为研究对象建模,船长130.5 m,宽38 m,型深8 m,航速10.5 kn,最大载重量9 240 t,船舶总吨位14 000 t。6个液压升降腿分布于全船两侧,每个桩腿(含桩高)71.6 m,截面为4 m×4 m方形,重450 t,所用钢板最厚达150 mm,80%为超高强钢;桩腿提升速度最快1 m/min,单桩提升能力3 750 t,支承能力5 000 t。为适应海底土壤状况,设计了箱型桩靴。桩靴位于桩腿底部,卧在船底凹槽内,长9 m,宽7 m,高6.305 m,重132 t。
1.3 计算模型假定
依据上述风电设备安装平台的本型参数,本文抓住船体的主要特点,利用有限元软件ANSYS建模,对计算模型各部分假定如下:
1)船体简化模型假定:主尺度130.5 m×38 m× 8 m,全部由板材构成,外壳板厚 4 cm,内隔板厚1.5 cm。底部抠出6个如桩靴尺度的长方体凹槽,凹槽中心假定距左右舷5 m,船体两端的凹槽中心距首尾端部10.25 m,中间的2个凹槽中心位于首尾中心线,如图1(a)所示。规定x,y,z轴分别为船身的纵向、横向和垂向。
2)桩靴简化模型假定:壁厚为5 cm的长方形箱体(外部尺寸9 m×7 m×6.3 m),重约128 t。
3)桩腿简化模型假定:四边内壁厚 5 cm,长71.6 m,重约453 t。桩腿插入桩靴内,即靴内含有一个4 m×4 m的空心立柱,桩靴与桩腿固结。如图1(b)所示。
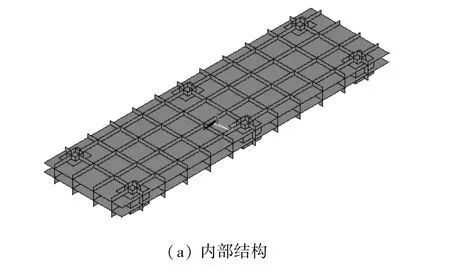
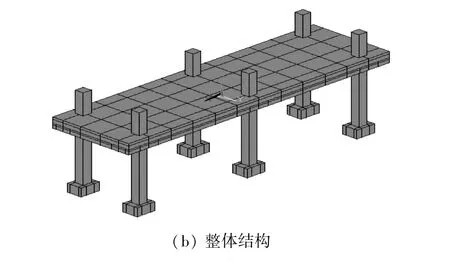
图1 船体模型结构图Fig.1 Model of the ship structure
4)根据桩腿在水下的不同长度,将计算模型具体分为如表1所示5种工况。

表1 计算模型工况划分说明Table 1 Details for the 5 cases
上述工况划分只考虑了桩腿齐放齐收的状态,因此每个桩腿在水下的长度都相等,结构始终保持关于横纵轴对称,对于非对称情况本文暂不作讨论。值得一提的是,尽管船体外型的主要参数来自于风电安装船,但所建立的计算模型并不能绝对的等同于实际船体。
1.4 各种工况物理属性分析
按上节所述方法建立简化计算模型,简化后,模型自身的质量为9 271 t。船身与桩腿的相对位置不同,整个船体自身的物理属性将发生改变,其中重心和转动惯量和水动力计算有直接的关系,表2给出了桩腿各种工况的重心和转动惯量数值。
计算模型是一个关于横轴、纵轴对称的模型,桩腿的升降,船身重心在水平面上始终位于船身的几何中心,在竖直方向上桩腿在水下越长(工况5),重心越低;桩腿在船体上下两部分较平均时(工况3),绕x轴的转动惯量相对较小。

表2 5种工况重心、转动惯量参数Table 2 The center of gravity and moment of inertial of the 5 cases
2 湿面的网格划分
由1.1节所述理论可知,浮体表面的离散化即湿面网格的划分是水动力分析的重要步骤。湿面网格划分的好坏直接影响到数值模拟结果的精确程度,针对船体湿面的网格划分前人有较多的研究[14-17],综合考虑计算精度和计算效率,忽略由于桩腿放下导致的吃水深度减小,吃水深度均取为3.6 m。对船体内外的网格剖分采用有限元软件来实现,提取水线以下部分船体外表面网格数据,对其重新整理、编号,得到计算所需要的边界元信息。具体划分如下。
2.1 船身网格划分
11块隔板沿纵向将船身划分为12个隔舱,这些隔舱分为带凹槽和不带凹槽2种类型。而带凹槽的箱体又分为位于船端隔舱和非船端隔舱2种,如图2(a)、(b)。
按照这样的特点,如图2(c)为船端隔舱底板,沿船身纵向长10.25 m划分11段,其中每个凹槽开孔处划分5段。沿船身横向长39 m划分39段,凹槽开孔处划分8段;非船端带凹槽隔舱底板,沿船身纵向长为11 m划分12段,沿船身横向长为39 m划分39段。图2(d)为不带凹槽隔舱底板,沿船身纵向划分11段,沿船身横向划分39段。沿船身垂向划分4段,底板到水平隔板1之间平均划分3段,水平隔板1到水面线划分1段。图2(e)为水线面以下船身网格划分整体结果,不含下部桩腿和桩靴的湿面元总数为6 801个。
2.2 桩靴网格划分
如图3为桩靴湿面网格划分,沿x轴方向分9段,沿y轴方向分8段,沿z轴方向分6段。上表面因桩腿的插入必须要去除相应面元。每一个桩靴上共有332个湿元,6个桩靴共计1 992个湿元,每个湿元的尺寸约为1 m×1 m。

图2 船身网格划分Fig.2 Mesh of the wetted surface on the hull

图3 桩靴网格划分Fig.3 Mesh of the wetted surface on the pile shoe
2.3 桩腿网格划分
沿x、y轴方向均划分为4段;根据其工况的不同,桩腿在水下的长度不同,其沿z轴方向划分的段数不一样,具体划分段数见表3,如图4所示。当处于工况1的时候,桩腿全部收起,此时认为桩腿底部与船底固结,划分湿面单元时作一块整板处理,不区分桩腿底面和船体底面。

表3 5种工况桩腿网格划分Table 3 Details for the mesh on the legs of the 5 cases

图4 桩腿网格划分Fig.4 Mesh of the surface on the legs
3 船体受波浪激励力分析
由式(9)可知,波浪激励力只与入射波势、绕射波势,以及船体参数有关,而与辐射波势无关。为检验所建立水动力模型的有效性,作为初步研究,本文只计算船体所受波浪激励力,并且不考虑水深变化的影响,将计算水深设定为1 km(与实际工作状态的几十米有一定的区别)。图5~10中(a)图分别给出了波向角β为-180°、-135°和-90°时的波浪激励力随波频率变化的关系。每幅图中的5条曲线代表平台5种不同的工况。为研究桩腿水下长度对船体受波浪激励力的影响,分别在低频、中频、高频选取一种波频率,提取该频率下不同工况所受的波激励力,作(b)图,图中的每条曲线代表波浪激励力在一定的波频率下随水下桩腿长度的变化趋势。
如图5,对于纵荡波浪激励力来说,波向角β=-135°时与波向角β=-180°时具有相同的量级,数值上前者略小于后者;β=-180°时船体受力的峰值在波频率0.4 rad/s附近,β=-135°时船体受力的峰值在0.5 rad/s附近;工况1受到的波浪力始终较小,在峰值频域附近,工况间的差距较大,说明桩腿的作用在峰值频域附近影响较大,其他频域内趋于一致。
如图6,对于横荡波浪激励力来说,波向角β=-135°时则明显小于波向角β=-90°时的情况;β=-135°时船体受力的峰值波频率在0.5 rad/s附近,β=-90°时船体受力的峰值在0.8 rad/s附近;当船体受波向角β=-135°,频率为0.5 rad/s左右的波作用时,船体受横荡波浪激励力随桩腿伸长而略有增大,如图6(b),其余情况,桩腿越长,受力趋于一致。
如图7,由各图曲线可知引起垂荡的波浪激励力各工况间的差别不大,说明桩腿水下长度对船体受垂荡力的影响很小;都有随波浪频率增加而减小的趋势,只是这种减小的趋势会随着波向角的改变而改变。迎浪时减小趋势较快,横浪时,这种趋势则变缓。
如图8,由各图曲线的疏密程度可知,引起横摇的波浪激励力力矩,工况间差别最大。波向角β=-135°时,力矩峰值出现在0.5~0.6 rad/s的波频域上,在峰值频域内,曲线较稀疏,说明桩腿影响明显。在中低频域内,桩腿在水下长度越长,船体受到力矩越大;波向角 β=-90°时,力矩峰值出现在 0.7~0.8 rad/s的波频域上。在中高频域内,桩腿在水下的长度越大,船体所受横荡力矩明显呈增大的趋势。
如图9,对纵摇来说,船体所受纵摇力矩对波浪方向和波浪频率更为敏感,而水下桩腿长度的影响较小。如图10,对艏摇来说,船体所受外力矩的变化规律与纵荡、横荡的规律相类似。

图5 纵荡激励力Fig.5 Wave excitation forces of surge

图6 横荡激励力Fig.6 Wave excitation forces of sway

图7 垂荡激励力Fig.7 Wave excitation forces of heave


图8 横摇激励力矩Fig.8 Wave excitation moments of roll


图9 纵摇激励力矩Fig.9 Wave excitation moments of pitch
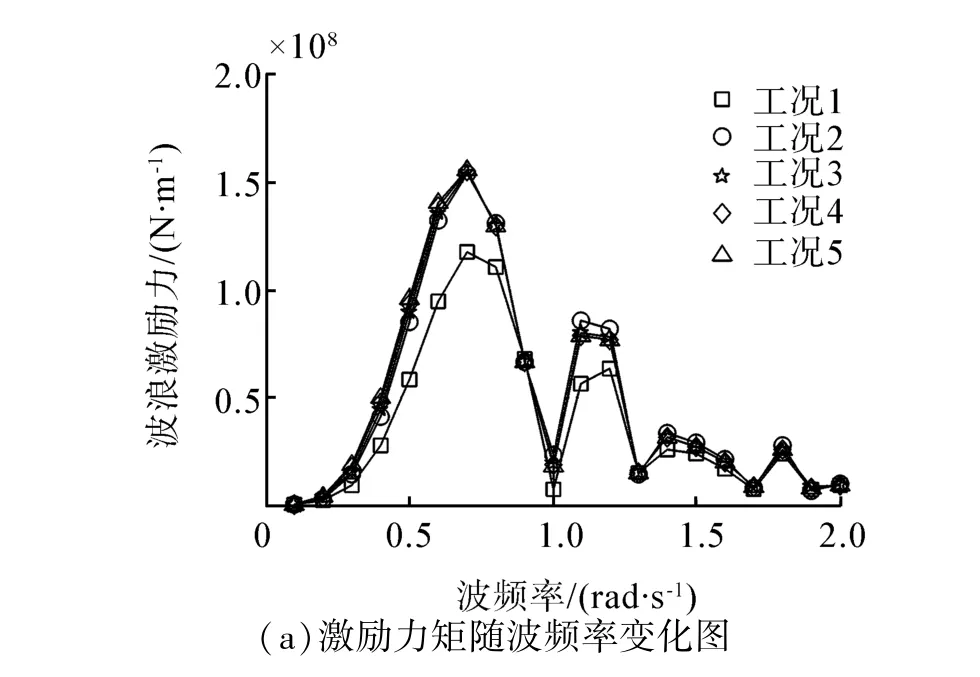

图10 艏摇激励力矩Fig.10 Wave excitation moments of yaw
4 结束语
通过对多腿支撑结构的水动力建模,划分船身、桩腿、桩靴的湿面单元,按水下桩腿长度的不同构建5种工况,数值分析了水下桩腿长度对结构所受波浪激励力的影响。结果表明:水下桩腿长度的不同对船体确实有着不可忽视的影响。首先船身的重心、转动惯量将随桩腿和船身的相对位置不同而发生变化;桩腿在水下的长度不同使船体所受波浪激励力、力矩也有明显的差异。下一步工作将重点对水下桩腿长度对船体的在波浪上动力响应的影响问题展开更加细致的研究。
[1]张太佶,汪张棠.一种新船型——海上风电设备安装船的开发[J].船舶,2009,20(5):38-43.
ZHANG Taiji,WANG Zhangtang.Development of new ship type clash marine wind turbine installation vessel[J].Ship&Boat,2009,20(5):38-43.
[2]刘贵浙,张勇慧.海上风电场工程船发展现状及展望[J].船舶物资与市场,2010(1):27-31.
LIU Guizhe,ZHANG Yonghui.Development and prospect of engineering vessel of offshore wind farm[J].Marine Equipment/Materials&Marcketing,2010(1):27-31.
[3]DAI Lijuan,EHLERS S,RAUSAND M,et al.Risk of collision between service vessels and offshore wind turbines[J].Reliability Engineering and System Safety, 2013(109):18-31.
[4]SCHUTZ W,SCHROTER F.Development of heave steel plate for mayflower resolution,special purpose vessel for erecting of offshore wind tower[J].Materials Science and Technology,2005,21(5):590-596.
[5]KAISER M J,SNYDER B F.Modeling offshore wind installation costs on the U.S.outer continental shelf[J].Renewable Energy,2013(50):676-691.
[6]姚震球,唐文献,马宝,等.海上风电安装船关键部位结构强度研究[J].中国造船,2012,53(2):79-87.
YAO Zhenqiu,TANG Wenxian,MA Bao.Research on strength of key structure at offshore wind power turbine installation vessel[J].Shipbuilding of China,2012,53(2):79-87.
[7]汤晶.海上风电安装船桩腿动载缓冲研究与强度分析[D].上海:上海交通大学2009:39-55.
TANG Jing.Dynamic load amortizing and strength analysis of leg of wind farm installation vessel[D].Shanghai:Shanghai Jiao Tong University 2009:39-55.
[8]汤晶,杨启,陈新权.海上风电机组安装船桩腿外载荷计算及强度分析[J].中国海洋平台,2009,24(2):6-10.
TANG Jing,YANG Qi,CHEN Xinquan.Loads computation and strength analysis of the leg of windmill battery fixing vessel[J].China Offshore Platform,2009,24(2):6-10.
[9]李刚强,钱娣.风力发电设备安装船的整船强度数值计算研究[J].船舶,2011,22(5):31-35.
LI Gangqiang,QIAN Di.Numerical calculation of structure strength for wind power equipment installation vessel[J].Ship&Boat,2011,22(5):31-35.
[10]龚闽.自升自航式船与地基土相互作用研究[D].上海:上海交通大学,2009:62-92.
GONG Min.Study of the interaction between the foundations and the structure of the liftboat[D].Shanghai:Shanghai Jiao Tong University,2009:62-92.
[11]马宝,唐文献,吴春艳,等.超大模数齿轮设计方法及在安装船升降系统中应用[J].机械设计与研究,2012,28(4):37-39.
MA Bao,TANG Wenxian,WU Chunyan,et al.Parametric modeling and contact analysis of supper large module pinion[J].Journal of Mechanical Transmission,2012,28(4):37-39.
[12]刘应中,缪国平.船舶在波浪上的运动理论[M].上海:上海交通大学出版社,1986:133-150.
[13]戴遗山,段文洋.船舶在波浪中运动的势流理论[M].北京:国防工业出版社,2008:64-89.
[14]REN Huilong,LIU Wenxi.Calculation of hydrodynamic coefficients of floating body with complex wetted surface[J].Journal of Ship Mechanics,2008,12(3):359-367.
[15]张海彬,任慧龙,宋竞正,等.一种船体三维湿表面网格自动生成方法[J].中国造船,2001,42(4):61-65.
ZHANG Haibin,REN Huilong,Song Jingzheng,et al.Method of 3D grid auto-generation of ship wetted surface[J].Shipbuilding of China,2001,42(4):61-65.
[16]戴愚志,余建星.一种船体及周围自由面的网格自动生成方法[J].船舶工程,2006,28(5):1-4.
DAI Yuzhi,YU Jianxing.3D mesh auto-generation method of ship hull and free surface[J].Ship Engineering,2006,28(5):1-4.
[17]杨晓蓉,余建星,姜丁,等.一种简洁的船舶湿表面网格快速自动生成方法[J].解放军理工大学学报:自然科学版,2008,9(3):274-278.
YANG Xiaorong,YU Jianxing,JIANG Ding,et al.Compact method of grid auto-generation of ship wetted surface[J].Journal of PLA University of Science and Technology,2008,9(3):274-278.
The analysis of the modeling and wave excitation force on the floating structure with legs
HUANG Yaxin,WU Hailang,CHEN Xujun
(College of Field Engineering,PLA Univ.of Sci.&Tech.,Nanjing 210007,China)
To analyze hydrodynamic characteristics of the floating structure with legs lifting up and down,the structure of a certain type of wind farm installation vessel is simplified and a hydrodynamic model is constructed by utilizing the FEA method.According to the length of the legs underwater,5 cases are set up and the meshes of the wetted surface on hull,pile legs and pile shoes are discussed.Based on these,the effects of the length of the legs underwater on the wave excitation forces/moments borne by structure are calculated by utilizing the potential flow theory.The relations between the wave excitation forces/moments and wave frequencies are presented,the results show that the effects of the legs underwater on the forces/moments primarily concentrate on the intermediate frequency range of the waves.There are little effects of the legs on the heave and pitch forces/moments,but there is a remarkable effect on the roll moment.
ocean engineering;floating structure with legs;FEA modeling;wetted surface;wave excitation force
10.3969/j.issn.1006-7043.201304036
U661.1
A
1006-7043(2014)09-1067-09
http://www.cnki.net/kcms/doi/10.3969/j.issn.1006-7043.201304036.html
2013-04-09. 网络出版时间:2014-08-29.
国家自然科学基金资助项目(51379213);国家工信部高性能船舶科
研基金资助项目;江苏省自然科学基金资助项目(BK2011121).
黄亚新(1962-),男,教授,博士生导师;
陈徐均(1972-),男,教授,博士生导师.
陈徐均,E-mail:chenxujun213@sina.com.
猜你喜欢
舰船科学技术(2022年20期)2022-11-28
快乐语文(2020年12期)2020-06-02
小学阅读指南·高年级版(2020年3期)2020-04-01
制造技术与机床(2018年10期)2018-10-13
中国铸造装备与技术(2017年3期)2017-06-21
小学教学研究(2017年21期)2017-02-26
焊接(2015年9期)2015-07-18
海军医学杂志(2015年2期)2015-02-27
中国舰船研究(2014年6期)2014-05-14
数学教学(2013年9期)2013-12-12