半潜式起重船浮吊作业的数值模拟与模型试验
2014-06-22 05:08:16杨建民
船舶力学 2014年7期
许 鑫,李 欣,杨建民
(上海交通大学 海洋工程国家重点实验室,上海200240)
半潜式起重船浮吊作业的数值模拟与模型试验
许 鑫,李 欣,杨建民
(上海交通大学 海洋工程国家重点实验室,上海200240)
深水起重船是海洋油气开发、海上风电设备安装中不可缺少的一项重要装备。以一艘最大起重能力达16 000 t的半潜式起重船为研究对象,分别用数值模拟和模型试验的方法研究其空勾和最大起重时在波浪作用下的运动性能。数值模拟方法基于三维线性势流理论,分别从频域和时域两个方面分析,在起重作业时考虑船体和重物两体之间的相互耦合作用,得到船体和重物运动的RAO和运动时例曲线;在上海交通大学深水池中对该起重船进行了静水衰减、白噪声和不规则波的模型试验,其分析结果与数值模拟方法相对比。结果表明,数值模拟和模型试验得到的结果非常吻合,数值模拟方法具有较高的可靠性;半潜式起重铺管船在波浪中拥有良好的运动性能,在文中列出的海况下能够安全地进行作业。
起重船;时域模拟;多刚体系统;模型试验
1 引 言
随着海洋石油开发、大型海上工程、沿海风电设备安装和海难救助事业的发展,大型起重船作为不可缺少的一种工程船舶,其需求正在迅猛增加。
海洋工程起重船,通常是指通过在船艏甲板上加装吊车而具有了水面上起重能力的船舶。1963年[1],Heerema公司将一艘邮轮进行了改造,使其具有了150 t的起重能力,这是世界上第一艘船式起重船。随着造船技术的发展,起重船的起重能力变得越来越大,同时也针对不同的定位、目标和环境发展出形式多样的新型海洋工程起重系统。当起重吨位超过2 000 t后,出现了驳型(图1a)和船型(图1b)的浮式起重船[2],如Saipem公司的Saipem 3000和Castoro Otto;Acergy公司的Sapura 3000和Seaway Polaris。这些工程船舶都具有几千吨的起重能力,而且具有多种不同的用途。随着起重吨位的进一步增大,各大海洋工程公司开始采用半潜式起重系统[3](semi-submersible crane vessel,SSCV)(图1c)。这类半潜式起重船主要由三部分组成:浮体、上层甲板和起重机。下层的浮体起到提供稳性支持的作用,因而其起重能力大大增加。目前世界上已经有6艘半潜式起重船(SSCV)[4],最大的起重能力已经达到了14 200 t,但过万吨起重能力的仅有两艘(见表1)。

图1 三种不同类型的起重船Fig.1 Three different types of crane vessel

表1 目前世界现有的半潜式起重船[4]Tab.1 The existing semi-submersible crane vessels all over the world
国内在海洋工程起重船设计、制造方面起步较晚,但到目前已经有了长足发展。由原先的起重能力几百吨发展到现在的几千吨,同时船舶数量也日趋增多[2-5]。其中,值得一提的是振华港机研制的蓝鲸号起重船,具有7 500 t的单吊起重能力[5],是目前国内起重能力最大的起重船,也是世界上单吊起重能力最大的起重船。目前我国在半潜式和超大型起重设备方面还是空白,这很大程度上限制了我国对深海资源的快速开发利用,因此开展半潜式起重船的研究十分必要。
随着大型海上工程起重船舶的发展,各国对该类船舶的关键技术也开展了有针对性的研究。由于海上作业受自然条件影响极其严重,为了增加船舶的海上作业能力和生存能力,有必要对船舶抵抗自然条件的能力(如抗风、抗浪)进行分析。目前国内外的研究主要包括作业耐波性能研究[6]、水动力耦合定位性能分析[7]、稳性分析[8]等。
本文针对即将建造的国内第一艘半潜式起重船,对其在起重作业前后的耐波性能以及起重过程中与重物的耦合运动进行了分析,并开展了相关的模型试验研究,对数值计算结果进行了验证,最终为今后的海上作业提供指导。
2 数值模拟
2.1 船型参数与环境工况
本文以一艘最大起重能力为16 000 t的半潜式起重船为研究对象(如图2),其全长220 m,型宽90 m,主甲板距基线48 m。该船下浮体为双体浮箱用来提供浮力,每个浮箱上有5个立柱。两座起重机位于船尾主甲板左右两侧,单座最大起重能力为8 000 t,当最大起重状态时,吊臂最大回转半径为50 m,主吊钩最大高度为可达到主甲板以上130 m。该起重船采用DP3动力定位,左右浮箱共包括14个螺旋桨。
为了研究浮吊作业中该起重船的运动性能,分别选取起吊准备状态(即空勾)和16 000 t的重物完全吊起状态为数值模拟的工况,船体和重物的质量、重心、惯量数据以及重物的位置见表2。其中船体和重物的纵向重心位置相对于船尾,指向船首为正;垂向重心位置相对于船体基线,向上为正;回转半径均以该物体重心为参考点。由于本文主要研究起重船的垂向运动(即垂荡、横摇、纵摇),且为了便于模型试验的操作,因此对于DP3动力定位进行了简化,采用四根水平拉出的软弹簧代替来模拟水平运动的约束(如图3)。

图2 半潜式起重船总布置图Fig.2 General layout of the SSVS
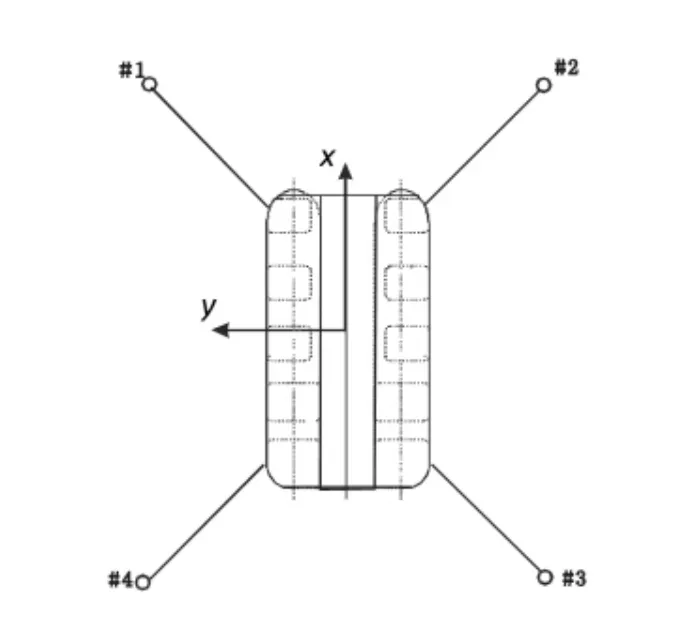
图3 简化的定位方式布置图Fig.3 Simplified arrangement of position system
根据作业海域波浪资料,作业水深为500 m。环境选择只考虑波浪荷载作用,风和流均暂不考虑。波浪谱选择JONSWAP三参数谱,公式如下[9]:

其中:S(f)为谱密度函数,Hs为波浪的有义波高,Tp为谱峰周期,f为波浪频率,g为重力加速度,fp为谱峰频率,有 fp=1/Tp,γ 为谱峰因子,σ 为形状函数(f> fp时,σ=0.09; f< fp时,σ=0.07)。

表2 船体参数和重物质量参数Tab.2 Main particulars of the vessel and lifting object

续表2
2.2 计算理论
数值计算过程中,对上文选择的工况分别进行频域和时域分析。频域分析中,使用三维势流理论计算船体的附加质量、阻尼系数等水动力参数以及船体运动响应传递函数(Response amplitude operator,RAO)等。速度势采用Green函数及边界元方法求解。频域运动分析局限在单体分析,即只考虑船体的运动,因此频域分析只针对起重准备工况。频域中船体的运动方程可表示为[10]:

其中:ω 为波浪圆频率;β为波向角;M为质量矩阵;A(ω)为附加质量矩阵;C(ω )为势流阻尼矩阵;D1为线性阻尼矩阵;Ke为静水回复力矩阵;Fe为外部回复矩阵;X( ω,β )为船体六自由度运动矢量;F( ω,β )为波浪诱导荷载。
时域计算则利用快速Fourier变换(FFT),产生波浪激励的时间序列,将已确定的波浪谱转化到时间域,以求得相应的入射波浪时间历程,考虑驳船所受波浪力以及其他外力,然后直接用数值方法求解时域内运动的常微分方程,本文中采用的是三阶Runge-Kutta方法。单体时域分析中运动方程为[11]:

其中:x为船体六自由度运动矢量;M为船体质量矩阵;A∞为频率无穷大时的附加质量矩阵;h( t-τ)为时延函数矩阵;q(t,x,)为船体受到的合外力矢量;D1为船体的线性阻尼矩阵;K为静水回复力矩阵;q)为一阶波浪力;)为二阶平均慢漂波浪力;qposi为水平系泊缆上的力。
考虑多体耦合运动时,需要分别考虑每个物体的惯性力、阻尼力等,并通过两体之间的连接缆绳上的力相互耦合,其方程如下[12]:

其中:x1和x2分别为船体和重物的六自由度运动矢量;M和m为船体和重物的质量矩阵;A∞为频率无穷大时的附加质量矩阵;h( t-τ) 为时延函数矩阵;q(t, x1,,x2,)为船体受到的合外力矢量;D1和D2为船体和重物运动的线性阻尼矩阵;K为静水回复力矩阵;为一阶波浪力;)为二阶平均慢漂波浪力;qposi为水平系泊缆上的力;qlift为船体和重物之间吊绳上的反力。
2.3 模型的建立与求解
使用面元法计算船体的水动力参数时,首先需要建立驳船湿表面模型(如图4)。驳船的湿表面部分被近似为在每个单元上均匀分布了源汇强度,源汇表征了流场速度势的分布,通过边界积分方程和Green函数方法可以求解湿表面的速度势,最后在整个湿表面对速度势积分求得一阶波浪力以及附加质量和阻尼系数。本文中使用DNV开发的HydroD软件[13]计算得到驳船的水动力参数,并求解频域运动方程。
时域非线性耦合分析使用Ocina公司的orcaflex软件[14]进行求解,分别考虑单体和多体时的计算求解。通过频域的附加质量和阻尼系数求得时延函数,并通过将一阶二阶频域波浪力参数通过时频转换到时域力,建立吊缆和系缆的模型,最终求解运动方程得到运动和受力。图5为时域分析模型图。

图4 船体湿表面模型Fig.4 Wet surface model of the hull
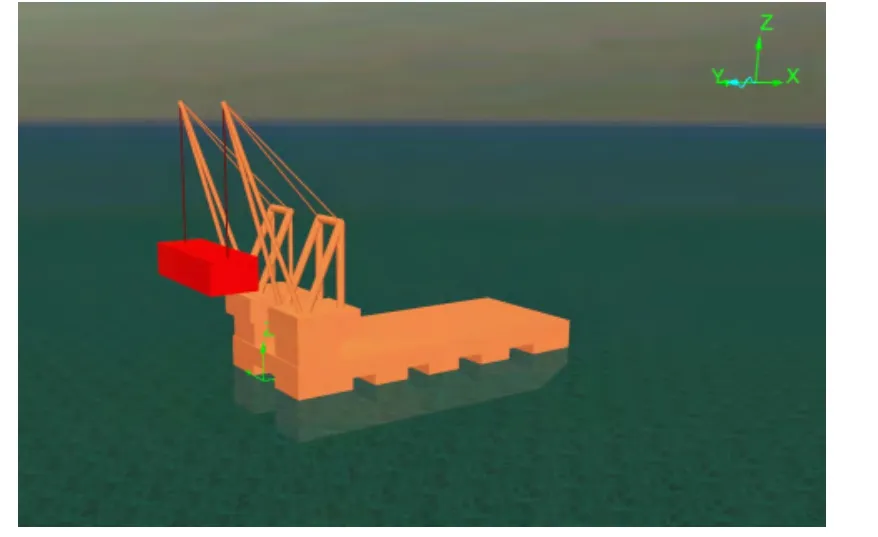
图5 时域模拟的模型图Fig.5 Model of time domain simulation
3 模型试验
模型试验在上海交通大学海洋工程国家重点实验室的深水试验池中进行,模型缩尺比为1:64。模型按缩尺比精心加工制作,模型尺度的加工误差小于1%,重量和重心位置的误差小于1%,各轴向惯性半径的误差小于3%。试验过程所有的测量数据以20次/秒的采样速度记录在计算机中,每个试验工况的测量时间不少于15分钟(相当于原型1.5小时),以获得足够的数据进行统计分析和谱分析。
模型试验[15]主要包括:静水中自由衰减试验,用以得到各方向运动的固有周期及阻尼系数;白噪声试验,得到了波频范围内的RAO;不规则波下船体六自由度运动和受力试验,分别得到不同工况下运动和受力情况的测量数据。图6为该半潜式起重铺管船在起重准备状态的不规则波浪试验,此时起重船为空吊状况;图7为挂有重物的起重状态的不规则波试验,在船尾吊臂上通过两根吊缆悬挂着重物。

图6 起重准备状态不规则波浪试验Fig.6 Irregular wave test of empty-lifting configuration

图7 最大起重状态不规则波浪试验Fig.7 Irregular wave test of full-lifting configuration
白噪声试验通过由众多规则波组成的一段宽频率带的波浪序列作为输入(如图8),其中纵轴为波浪谱密度函数,横轴为入射波的圆频率,有效值在0.2~1.4 rad/s之间,通过试验可测得船体运动的响应值,并使用谱分析方法得到响应谱密度,最终得到单位响应运动谱密度,即RAO。不规则波试验中入射波浪的有义波高为3 m,谱峰周期为10.9 s的不规则波浪,图9为试验采集的波浪谱与理论目标值的比较,从而验证其精确性。此外可以看出入射波的圆频率发生在0.4~1.5 rad/s,即周期在4.19~15.7 s;且主要能量集中在圆频率0.5~0.7 rad/s,即周期在9~12.6 s。

图8 白噪声试验的波浪谱Fig.8 Wave spectrum of white noise wave test

图9 不规则波浪试验的波浪谱Fig.9 Wave spectrum of irregular wave test
4 结果与分析
4.1 半潜式起重船耐波性分析

图10 首斜浪状态下船体运动的RAOFig.10 The motion response amplitude operator of vessel in bow sea

图11 数值计算和模型试验得到的船体自由静水中的衰减运动曲线Fig.11 Results of free oscillation in calm water by numerical simulation and model test
针对起重准备状态,首先从频域角度分析船体的运动性能。通过频域数值计算方法和白噪声试验分别得到了波浪频率从0.1~1.5 rad/s、浪向角从0°~360°的入射波作用下,驳船六自由度的运动传递函数(RAO)。图10分别是船体在首斜浪(即浪向225°)时的垂荡、横摇和纵摇的RAO曲线,模型试验和数值模拟结果进行对比,非常一致,并且其他浪向的结果类似,从而证实了频域分析方法对于该船体具有较好可靠性。此外,通过图10的RAO曲线还可看出,驳船的垂荡和纵摇峰值出现在周期为15 s以上,垂荡峰值为1.6 m/m,纵摇峰值为2.7°/m,横摇的峰值出现在30 s附近,最大峰值为2°/m。由此可以看出,对于半潜式船型的设计,使得船体摇荡运动峰值均有效地避开了自然海域中波浪周期出现较为频繁的范围,使得其在波浪环境下的运动响应得以控制。尤其是对横摇的改善最为显著,一般船体横摇的固有周期在10~15 s之间,对横浪状态下运动响应会十分显著,而半潜式船体则很好地改善了这个问题。
时域数值计算主要模拟确定的入射波序列作用下,船体运动的时间历程和统计值,从而反映实际海况中船体运动的短期预报。本次研究中,波浪选择JONSWAP三参数谱,有义波高为3 m,谱峰周期10.9 s,谱峰因子取3.3,总时间为1.5小时。首先通过用时域方法模拟船体在静水中的自由衰减,并与模型试验对照,一方面可以验证模型试验中船体的重心和转动惯量的调节是否正确,另一方面可以确定船体在水中运动的粘性阻尼系数。图11为船体自由状态下在静水中的横摇和纵摇衰减运动曲线,可以得到横摇固有周期为28.26 s,纵摇固有周期为15.77 s,和RAO结果的峰值一致。通过调节时域计算中的线性阻尼,可以使得数值模拟和模型试验得到的衰减曲线相当吻合。
经过阻尼修正后,对有入射波浪的工况进行模拟,得到实际尺度1.5小时的海况下的运动预报。图12为首斜浪作用下船体摇荡运动时例曲线,可以看出数值计算和模型试验结果吻合非常一致,验证了时域计算的可靠性。表3和表4分别为首迎浪和首斜浪情况下船体运动的统计值,可以看出数值计算和模型试验结果较为一致,此外垂荡运动最大最小值保持在±0.6 m以内,横摇在±1°以内,纵摇在±0.7°以内,对于3 m有义波高和10.9 s谱峰周期的不规则波浪下,半潜式起重船的运动性能良好,摇荡幅值均在规范要求内。

表3 首迎浪下数值计算和模型试验的统计值结果Tab.3 Statistical results of numerical simulation and model test in ahead sea

表4 首斜浪下数值计算和模型试验的统计值结果Tab.4 Statistical results of numerical simulation and model test in bow sea


图12 首斜浪作用下船体摇荡运动时例曲线Fig.12 Motion time series of vessel by numerical simulation and model test in bow sea
4.2 起重作业时与重物的耦合分析

图13 首迎浪作用下船体摇荡运动时例曲线Fig.13 Motion time series of vessel by numerical simulation and model test in ahead sea
当起重船起重作业时,重物被充分吊起后,船体和重物在波浪下耦合运动。由频域计算可以得到船体单独的水动力参数,通过时域耦合分析可以得到船体和重物分别的运动以及吊缆上的受力。环境条件选择浪向为首迎浪,JONSWAP三参数谱,有义波高为3 m,谱峰周期10.9 s,谱峰因子取3.3。模型试验对起重船在吊重物状态不规则波浪作用下的运动进行采集,得到结果并和数值计算相对比。图13为首迎浪作用下船体的垂荡运动和纵摇运动的时例曲线,可以看出数值计算和模型试验的结果非常吻合,证明了多体时域耦合分析方法同样具有很高的准确性。
表5是首迎浪作用下,最大起重状态下作业中船体和重物的运动以及吊缆受力的统计值,可以看出船体运动幅值均在规范要求范围内;相比于空勾状态时,受重物运动的影响,船体垂荡运动有所增大,纵摇运动有所减小。但重物的纵荡运动较大,最大值为2 m左右,垂荡最大值大于1 m,对于需要精细定位的物体,则需要辅助的减缓设备以降低运动幅值。

表5 首迎浪作用下数值计算得到的统计值结果Tab.5 Statistical results of numerical simulation in ahead sea
5 结 论
本文主要研究一艘起重能力为16 000 t的半潜式起重船在空吊状态时的耐波性能和最大起重状态时的耦合运动。得到如下结论:
(1)使用频域分析方法计算起重船在空吊状态下的RAO和白噪声试验结果比较吻合很好;且半潜式船体的设计,使得摇荡运动固有周期均有效地避开了自然海域中波浪周期出现较为频繁的频率段。
(2)通过自由衰减试验确定半潜式起重船由于粘性作用产生的线性阻尼,从而使用修正后的计算模型模拟有义波高3 m,谱峰周期10.9 s的不规则波浪下的时域运动,得到船体摇荡的运动时例,并和不规则波浪试验对比,结果十分一致。对于在此海况下半潜式起重船具有较小的运动幅值,符合作业可接受要求。
(3)通过时域多体耦合分析方法模拟最大起重状态下的结果仍能和模型试验吻合较好;且船体运动幅值较小,但重物的运动幅值稍大,对于是精密安装作业时,需要考虑更平静的海况,或是使用辅助缓冲设备减缓重物的运动幅值。
随着我国深海油气开发的发展,各类大型开采、生产设备不断增加,深海油气勘探技术不断提高,海上大型配套辅助设备必然成为未来发展的热点,还需要研究工作者对此进行更多更为详尽的工作。
[1]Milestones of Heerema[EB].http://www.heerema.com/Default.aspx?tabid=265.
[2]张 昊,王 辉,何 宁.海洋工程大型起重设备及其关键技术研究[J].海洋工程,2009,27(4):130-139.
Zhang Hao,Wang Hui,He Ning.Analysis of the key technology of the offshore engineering lift system and crane[J].The Ocean Engineering,2009,27(4):130-139.
[3]Snyder,Robert E,McCabe,et al.Micoperi 7000:The world’s largest SSCV goes to work[J].Ocean Industry,1988,23(7):11.
[4]Victor.Top 7 Largest Crane Vessels[EB].Engineering,Jan 14,2011.http://www.top7site.com/engineering/top-7-largestcrane-vessels.
[5]张茴栋.7500吨全回转起重船的压载系统的优化研究[D].上海:上海交通大学,2010:3-4.
Zhang Huidong.Optimization study on ballast system for 7500 tons revolving derrick barge[D].Shanghai:Shanghai Jiao Tong University,2010:3-4.
[6]李金玉,商 辉,陈 刚等.深水起重铺管船作业性能理论与试验研究[J].海洋工程,2010,28(4):33-39.
Li Jinyu,Shang Hui,Chen Gang,et al.Theory and model test study on deepwater derrick lay barge[J].The Ocean Engineering,2010,28(4):33-39.
[7]俞 .半潜起重船动力定位环境荷载计算方法初探[J].船舶,2010(1):13-17.
Yu Yun.Preliminary investigation on the calculation method of dynamic positioning environmental load of semi-submersible lifting and pipe-laying vessel[J].Ship&Boat,2010(1):13-17.
[8]张明霞,夏益美,林 焰.起重船吊重跌落后的动静稳性分析[J].中国造船,2009,50(3):74-83.
Zhang Mingxia,Xia Yimei,Lin Yan.Static and dynamic stability analysis with sudden loss of cargo during lifting for crane vessel[J].Shipbuilding of China,2009,50(3):74-83.
[9]许 鑫,杨建民,吕海宁.导管架平台浮托法安装的数值模拟与模型试验[J].上海交通大学学报,2011,45(4):439-445.
Xu Xin,Yang Jianmin,Lu Haining.Experimental and numerical analysis for floatover installation on jacket[J].Journal of Shanghai Jiao Tong University,2011,45(4):439-445.
[10]刘应中,缪国平.船舶在波浪上的运动理论[M].上海:上海交通大学出版社,1987:56-77,133-150.
Liu Yingzhong,Miao Guoping.The theory of ship motion in the wave[M].Shanghai:Shanghai Jiao Tong University Press,1987:56-77,133-150.
[11]Cummins W E.The impulse response function and ship motions[R].David Taylor Model Basin Washington DC,1962.
[12]Clauss G F,Jacobsen K.Multi-body systems in waves-Impact of hydrodynamic coupling on motions[C].Proceedings of the 12th International Congress of the International Maritime Association of the Mediterranean,IMAM 2005.2005,1:95-105.
[13]HydroD user’s manual[M].Dnv,2004.
[14]OcraFlex Manual(Version 9.0a)[M].Orcina Ltd.,2005.
[15]杨建民,肖龙飞,盛振邦.海洋工程水动力学试验研究[M].上海:上海交通大学出版社,2007:65,70-71.
Yang Jianmin,Xiao Longfei,Sheng Zhenbang.Experimental study of hydrodynamics in ocean engineering[M].Shanghai:Shanghai Jiao Tong University Press,2007:65,70-71.
Numerical and experimental analysis for lifting of a semi-submersible crane vessel
XU Xin,LI Xin,YANG Jian-min
(State Key Laboratory of Ocean Engineering,Shanghai Jiao Tong University,Shanghai 200240,China)
Deepwater crane vessel is necessary equipment for the installation of offshore wind driven generator and the development of ocean petroleum and gas.This paper investigated the lifting process of a semi-submersible crane vessel with 16 000 t lifting capacity by numerical and experimental analysis.Numerical analyses based on 3D potential flow theory in both frequency and time domain were carried out for full-lifting and empty-lifting configuration during lifting operation.Corresponding model tests were also performed in deep water basin of Shanghai Jiao Tong University.The comparison between numerical and experimental results shows that the response amplitude operator and time series agree quite well.The semi-submersible crane vessel has very favorable hydrodynamic behavior in considered sea state and the loads of equipments are allowable.
crane vessel;time domain simulation;multi-rigid-body system;model test
U661.7
A
10.3969/j.issn.1007-7294.2014.07.009
1007-7294(2014)07-0799-10
2013-12-04
国家自然科学基金重点项目(51239007)
许 鑫(1988-),男,博士,E-mail:163u@163.com。
李 欣(1975-),女,上海交通大学副教授,硕士生导师,E-mail:lixin@sjtu.edu.cn。
猜你喜欢
舰船科学技术(2022年22期)2022-12-13 03:36:58
海洋石油(2021年3期)2021-11-05 07:43:10
中国海上油气(2020年5期)2020-10-20 09:28:48
发明与创新·中学生(2018年10期)2018-10-15 09:15:20
家庭百事通·健康一点通(2017年9期)2017-09-22 00:31:54
海洋工程装备与技术(2017年5期)2017-03-05 09:49:39
中学生数理化·八年级物理人教版(2016年2期)2016-04-07 10:20:24
船海工程(2015年4期)2016-01-05 15:53:40
石油化工建设(2015年6期)2015-12-01 04:17:32
电子设计工程(2014年17期)2014-02-27 12:00:03