简支平板上多个惯性主动吸振器的控制原理以及数值分析
2014-06-15 16:18刘孝斌俞孟萨高岩
船舶力学 2014年7期
刘孝斌,俞孟萨,高岩
简支平板上多个惯性主动吸振器的控制原理以及数值分析
刘孝斌,俞孟萨,高岩
(中国船舶科学研究中心,江苏无锡214082)
文章使用阻抗方法建立了多个吸振器分布式反馈控制简支平板的振动模型,数值计算分析了这种控制方式的机理。惯性吸振器的电磁力、惯性力与弹性力耦合产生作用力于简支平板,惯性吸振器之间通过平板振动也会产生耦合,通过数值模拟揭示了反馈控制方式的“模态控制”和“主动阻尼”的机理,吸振器的数量和分布范围越大,控制的振动频率范围和控制性能就会越高,为吸振器的优化布置提供了理论支撑。辐射声功率为目标函数对反馈控制机理进行了分析,低频时奇—奇模态占辐射主要贡献成分,中心位置的单个吸振器就可以取得很好的辐射声控制效果。
惯性主动吸振器;主动控制;速度反馈;分布式控制
1 引言
各种运输工具如航空、航运应用中对燃油经济性和快速性的要求越来越高,轻薄材料如复合材料会得到大量应用,这引来了振动与噪声的问题。传统的被动控制措施主要作用于中高频区域,低频区域被动控制会以大质量为代价,这与降低运输工具的质量相违背,主动控制在低频区域可以有效地控制振动与噪声[1]。
主动控制区别于被动控制的特点是它需要外部能量的输入,从而抵消不需要的振动和噪声。主动控制的范围包括有源消声、主动吸振以及主动隔振等,目前都有相应的产品或者在开发过程之中。澳大利亚的柯林斯级潜艇上在双层隔振系统中间质量块上安装了主动吸振器,柴油机的运行工况下前三阶频率都得到了良好的控制。主动吸振器以其安装方便、稳定可靠以及宽带控制的优点使它最近越来越成为一个热点[2]。
英国南安普顿大学的ISVR对采用电磁力的惯性主动吸振器进行了相关的研究,Gonzalez Diaz[3]建立了单个惯性主动吸振器对平板振动的控制方程,通过理论计算和试验考察了吸振器的控制性能以及稳定性能,然后分析了吸振器的缩尺与输出力之间关系;哈尔滨工程大学的王佳静[7]设计制造了惯性主动吸振器,并进行了大量的相关试验对吸振器的控制效果进行了验证。
本文建立了多个惯性主动吸振器对简支平板的分布式控制方程,平板振动总能量与辐射声功率作为目标函数对吸振器的控制性能进行考察,详细阐述分析主动吸振器的控制机理,为优化吸振器的合理布放提供依据。
2 理论模型

图1 吸振器与平板组成的弹性系统示意图Fig.1 Elastic system composed of actuators and plate
单个吸振器与平板的耦合振动方程[3]已经得出,吸振器由永磁体、弹簧、线圈构成,永磁体有质量效应,弹簧有阻尼和弹性效应,永磁体和线圈产生电磁力,吸振器与平板组成弹性系统。系统的振动与其边界条件、外界激励、本身材料都有着密切关系,使用多个吸振器可以提高控制的可靠性,建立多个吸振器的振动方程求解系统的振动,吸振器不仅与平板振动有振动耦合,吸振器相互之间也有振动耦合,该问题有一定的复杂性。先考察两个吸振器的平板系统振动,如图1所示。假设两个吸振器的位置分别为c1,c2,Yc1c1,Yc2c2分别为两个吸振器接触点处的简支平板的输入导纳,Yc1p,Yc2p为外界激励力fp点分别到两个吸振器接触点处的传递导纳,Ya1,Ya2分别为两个吸振器永磁体的导纳,Za1,Za2分别为两个吸振器弹簧的阻抗。fc1,fc2分别为两个吸振器接触点处简支平板受到的传递力,fm1,fm2分别为两个吸振器永磁体受到的作用力,fa1,fa2分别为两个吸振器线圈与永磁体输出的电磁作动力,w˙m1,w˙m2分别为两个吸振器永磁体的振速,w˙c1,w˙c2分别为两个吸振器接触点处简支平板的振速,(1)式为位置c1处吸振器的振动方程,(2)式为位置c2处吸振器的振动方程,

其中


φmn(x,y)=sin( mπx/lx)sin( nπy/ly)为简支平板的振型函数,]为简支平板的共振频率,lx,ly为简支平板的尺寸,D为简支平板的刚度,Mp=ρlxlyh/4,η为简支平板的结构损耗因子,Mai为永磁体的质量,Kai为弹簧刚度,Cai为弹簧阻尼系数,ψi为输出电磁作动力的力常数,iai为线圈通电电流,与(1)式和(2)式可以分别解得振速与外界激励力、作动力以及其他吸振器输出的作动力关系:


标记

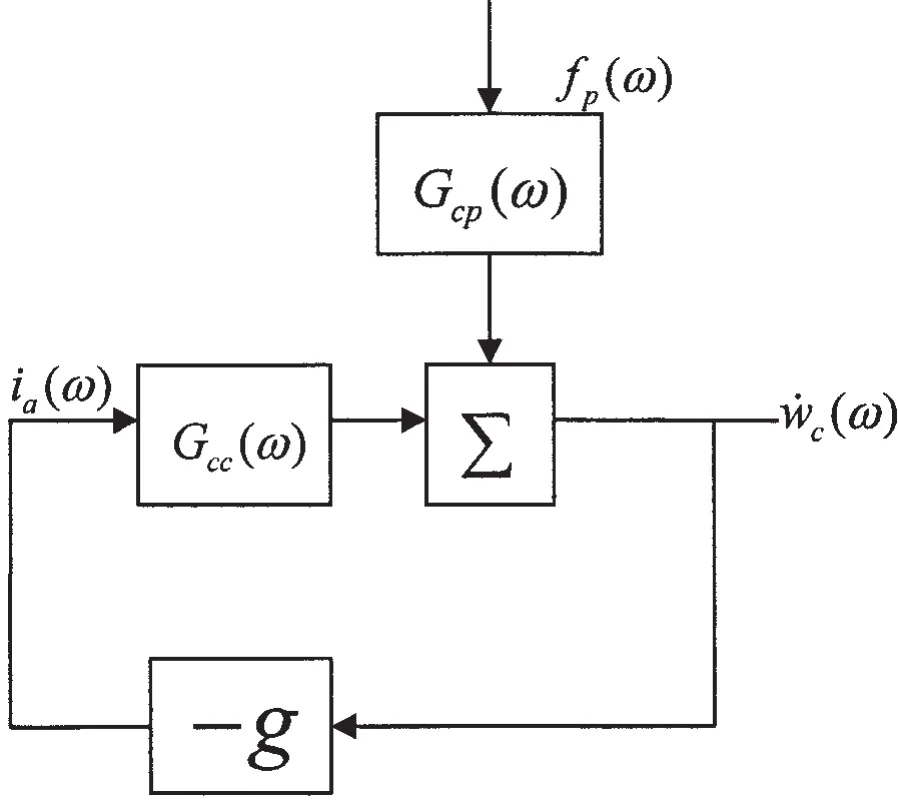
图2 反馈控制示意图Fig.2 Diagram of feedback control
建立闭环控制系统[4]ia1=-g1w˙c1,ia2=-g2w˙c2,其中g1,g2为反馈系数,如图2所示。

将(1a)、(2a)式和(6)、(7)式联立,并重新排列得:

写成矩阵形式

解得了两个吸振器反馈控制平板振动的系统方程,利用振动系统的线性特征,平板任意点振速就可以表达为

两个吸振器控制平板振动一般化到L个吸振器控制平板振动,与推导两个吸振器的过程一样,L个吸振器反馈控制平板振动的系统方程为


其中
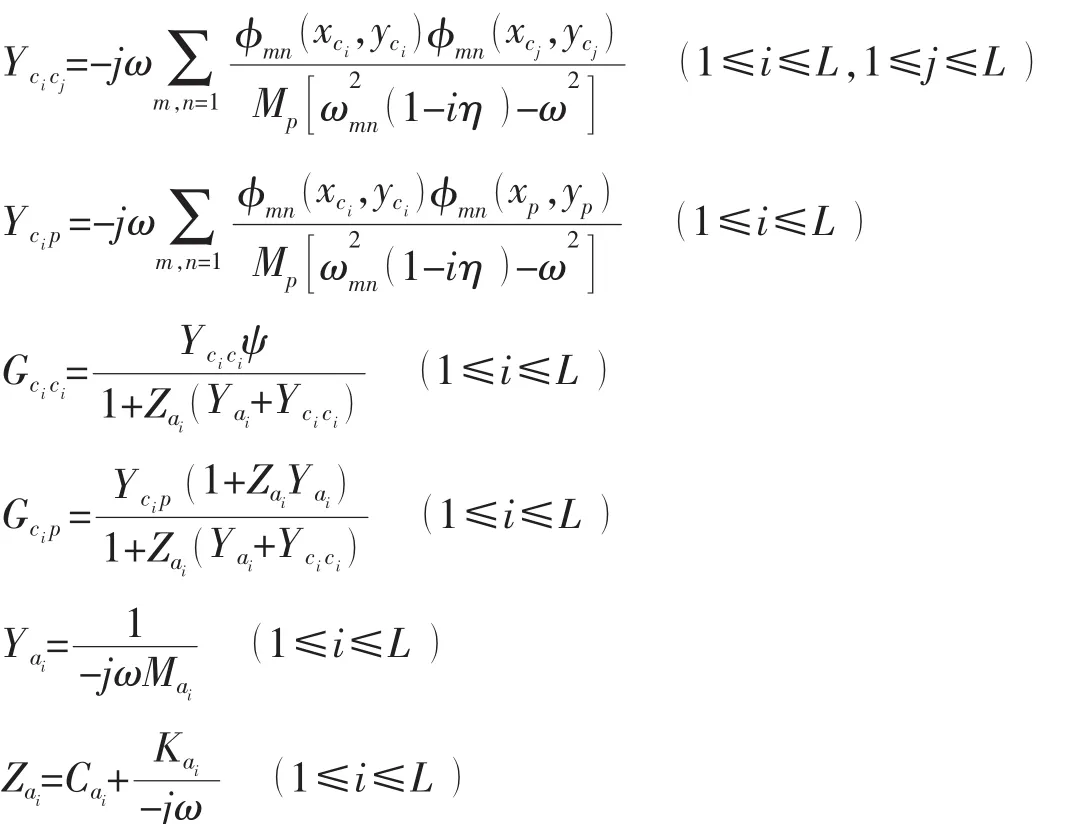
其中:Ycicj为i吸振器与j吸振器的传递导纳,Ycip为i吸振器与外界激励力点的传递导纳,Gcici为i吸振器的电流值与i吸振器处振速的传递函数,Gcip为外界激励力与i吸振器处振速的传递函数,Yai为i吸振器永磁体的导纳,Zai为i吸振器弹簧的阻抗。
任意点振速表达为:

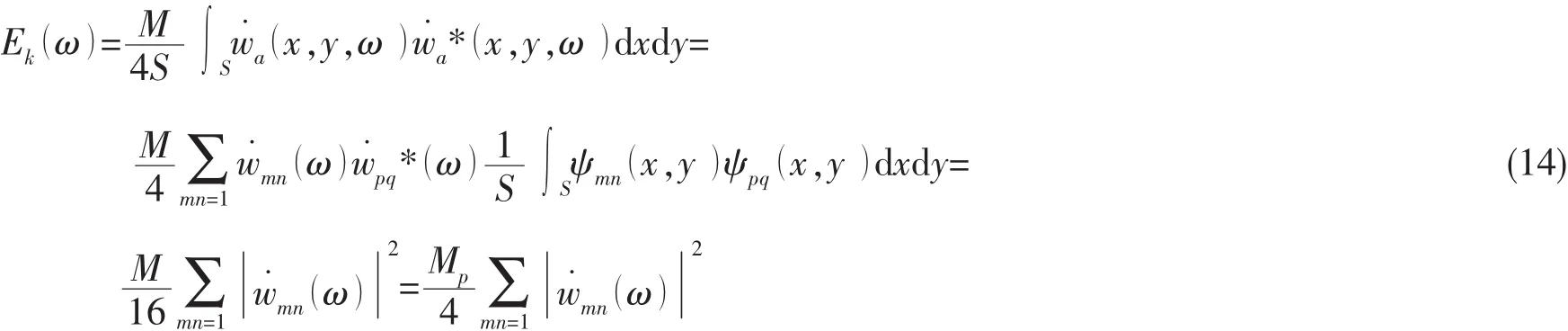
平板动能定义为平板上所有点动能的积分,也可以在模态空间上表示,就可以整体评估L个吸振器控制下的平板振动,为吸振器优化布置提供定量计算工具。
振动物体的控制效果不仅表现在振动物体本身的振动控制作用,同样表现在振动物体向周围流体的辐射控制作用,振动与辐射并不一致,还会出现振动增大而辐射减小的特殊情况,辐射与振动的空间分布、振动频率密切相关,他们之间的关系可以用辐射效率来表示,定量考察辐射就十分必要。
有限大平板振速用模态形式表达为:
矩形平板边界条件为简支情况时,φmn(x,y)=sin( mπx/lx)sin( nπx/ly),该处只讨论矩形简支板的振动辐射问题。
辐射的求解可以用空间上的Rayleigh积分,也可以用波数空间的积分,Wallace[5]用Rayleigh积分方法计算了矩形简支板远场声辐射问题:



其中:α=k0lxsinθcosφ,β=k0lysinθsinφ,k0,ρ0,c0分别为外部流体的波数,密度和声速,r为远场点与矩形板角点距离,θ,φ分别为远场点的极角和方位角。
辐射声功率为
3 振动与辐射的控制数值分析
表1为简支平板的计算参数,表2为吸振器计算参数,其中反馈系数g=1,平板负载为空气负载,考察吸振器的布放位置与数量对振动能量以及辐射功率的控制效果,为优化布放提供指导意见,振动能量与辐射声功率的数学表达式分别为(14)式与(17)式。

表1 简支平板的振动参数Tab.1 Parameters of simply-supported plate
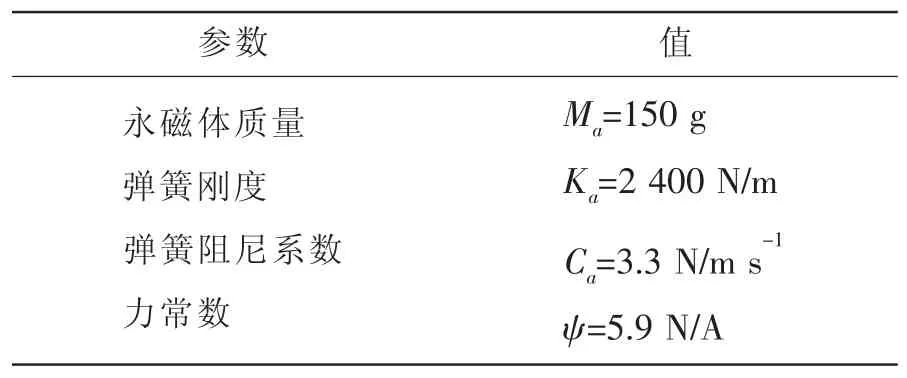
表2 吸振器参数Tab.2 Parameters of actuators
图3为平板振动总能量的示意图,其中单吸振器工况对应的吸振器布放位置为平板正中位置,也就是位置点[lx/2,ly/2],中间位置点位于偶数模态的波节位置,只对奇数—奇数模态有控制效果,由图中可以看出f1,1=39 Hz,f1,3=238 Hz,f3,3=352 Hz,f5,1=382 Hz控制效果明显,图4(a)为频率f1,1=39 Hz的平板振速幅值空间分布示意图,可以明显看出整个平板的振动都被控制住;而在共振频率f3,1=153 Hz处控制效果不明显,该频率与偶数模态频率f2,2=156 Hz基本重合,图4(b)为该频率处的平板振速幅值空间分布示意图,该频率有两个主要的振动模态,处于中心点的吸振器只对(3,1)模态有控制作用,而对(2,2)模态没有控制作用,控制后的平板振速幅值空间分布趋近于(2,2)模态振型函数。
双吸振器工况对应的两个吸振器布放位置为[lx/4,ly/2],[3lx/4,ly/2],布放点位于简支平板(2,1)模态的波峰位置处,上面的讨论中可以知道y方向上只能控制奇数模态,而在x方向上不仅可以控制奇数模态,也可以控制偶数模态(除4n阶模态外,吸振器布放点位置处于4n阶模态的波节)。从图中看出在奇数—奇数模态频率f1,1=39 Hz,f1,3=238 Hz,f3,3=352 Hz,f5,1=382 Hz处依旧有控制效果,x方向的偶数模态频率y方向的奇数模态频率f2,1=81 Hz,f2,3=281 Hz相较于单吸振器工况也出现了明显控制效果,在x方向的4n阶模态频率f4,1=253 Hz没有控制效果。可以得出这样的结论,两个吸振器作用相较于一个吸振器作用,其控制的模态数量增加,其控制效果的有效频率范围从低模态频率处向高模态频率处扩张。

图4 平板振速幅值空间分布示意图Fig.4 Spatial distribution of plate’s vibration amplitude
四吸振器工况为布放四个吸振器,其布放位置分别为[lx/4,ly/4],[3lx/4,ly/4],[lx/4,3ly/4],[3lx/4,3ly/4],其布放位置位于简支板(2,2)模态振型函数的波峰位置,可以控制除4n模态的所有模态,从图中可以看出f4,1=253 Hz,f4,2=328 Hz,f1,4=412 Hz,f2,4=455 Hz,f4,3=453 Hz模态频率处的振动控制效果为零,而在其他频率处都有明显的控制效果,相较于两个吸振器控制进一步拓展了其控制性能。可以得到这样的结论:该工况下的吸振器布置可以控制大部分的模态,低模态频率共振峰基本被控制,从主动控制在低频区域的有效要求来说,四个吸振器就已经基本达到了低频控制的要求。
图5为平板辐射声功率频谱,从理论上可以推知在低频区间上[6],奇数—奇数模态的辐射相当于单极子,偶数—奇数或者奇数—偶数模态的辐射相当于偶极子,而偶数—偶数模态的辐射相当于四极子。辐射声功率频谱图中可以看出奇数—奇数模态频率处峰值很高,低频处f1,1=39 Hz,f3,1=153 Hz,f1,3=238 Hz峰值最为突出,在其他模态频率处峰值相对来说较低。

图5 平板辐射声功率频谱Fig.5 Sound radiation power of plate
平板振动总能量控制讨论中得知单个吸振器控制奇数—奇数模态,而低频区域的声辐射奇数—奇数模态占主要贡献,单个吸振器就已经很好地控制了平板的声辐射,继续增多吸振器的数量对平板声辐射的抑制效果不再明显。
图中需要注意的是在一些非奇数—奇数模态频率位置处,其控制后的声辐射反而要大于控制前,这是由于吸振器改变了平板振动的波数,使得振动波数向奇数—奇数模态处转移,使得能量更容易向外场辐射。
4 结论
文中建立了多个惯性主动吸振器对简支板的耦合振动方程,数值模拟了吸振器对平板振动和辐射的控制效果,从而对控制机理以及合理布放得到了如下结论:
(1)吸振器对平板振动的共振峰控制效果明显,吸振器数量越多,控制的幅值和频率范围扩大。
(2)平板振动与辐射并不存在一致的正比关系,低频辐射时奇数—奇数模态占主要贡献,因此辐射控制注意力要集中于奇数—奇数模态的振动控制。
[1]Gardonio P.Review of active techniques for aerospace vibro-acoustic control[J].J Aircr,2002,39:206-214.
[2]Active damping devices and inertial actuators[J/OL].Micromega Dynamics,www.Micromega dynamics.com/doc/ADD_Catalog_Rev2.pdf.
[3]Diaz C G,Paulitsch C,Gardonio P.Active damping control unit using a small scale proof mass electrodynamic actuator[J]. Journal of the Acoustical Society of America,2008,124(2):886-897.
[4]Distefano J J,Stubberud A R,Williams I J.Feedback and control of systems[M].McGraw-Hill Press,NewYork,1990.
[5]Wallace.Radiation resistance of a rectangular panel[J].Journal of the Acoustical Society of America,1972,51:946-952. [6]Fahy F J.Sound and structural vibration[M].Academic Press,London,1985.
[7]王佳静.惯性式主动吸振系统设计及其特性研究[D].哈尔滨:哈尔滨工程大学,2009.
Control mechanism and numerical analysis of proof mass electromagnetic actuators on the simply supported plate
LIU Xiao-bin,YU Meng-sa,GAO Yan
(China Ship Scientific Research Center,Wuxi 214082,China)
This paper builds the theoretical model of multiple proof mass actuators controlling the simplysupported plate by velocity decentralized feedback,then the control mechanism is analyzed from numerical results.The electromagnetic force,inertial force and elastic force are coupled together to excite the plate and the coupling among actuators are transmitted through the plate.Modal control and active damping are revealed from numerical results,more actuators are used and more frequency range and control performance are obtained,this supports the actuator’s distribution method.Radiation sound power as object function is analyzed,odd-odd modes in the low frequency dominate the radiation and single actuator in the middle of panel can achieve good radiation control performance.
proof mass;active control;velocity feedback;decentralized control
O328
A
10.3969/j.issn.1007-7294.2014.07.014
1007-7294(2014)07-0841-08
2014-03-31
刘孝斌(1984-),男,中国船舶科学研究中心工程师,E-mail:liuxbin@aliyun.com;俞孟萨(1960-),男,博士,中国船舶科学研究中心研究员。
猜你喜欢
汽车实用技术(2021年16期)2021-09-09
山东交通科技(2020年1期)2020-07-24
工程与建设(2019年3期)2019-10-10
中华建设(2019年6期)2019-07-19
西南交通大学学报(2018年5期)2018-11-08
武汉理工大学学报(交通科学与工程版)(2015年5期)2015-12-05
汽车与新动力(2015年1期)2015-02-27
噪声与振动控制(2015年4期)2015-01-01
噪声与振动控制(2015年4期)2015-01-01
噪声与振动控制(2015年4期)2015-01-01