
小型H型垂直轴风机变桨距机构研究
2014-06-19 12:00刘立群陈鹏洪
太原科技大学学报 2014年5期
杨 凯,刘立群,陈鹏洪,田 行,曹 伟,葛 竹
(1.太原科技大学电子信息工程学院,太原 030024;2.92325部队,山西 大同 037036)
随着全球经济的快速发展,人类社会的环境问题和能源问题面临严峻的危机,大力开发清洁能源、可再生能源已成为当务之急,因此风能作为最廉价、最有希望的绿色能源开始被大规模开发使用[1]。风力发电机可以分为水平轴风机和垂直轴风机两种,相对于垂直轴风机,水平轴风机的研究已趋于成熟,但是重心高不稳定,需要偏航装置,噪声污染大以及不易于建筑集成等缺点始终制约着它的发展,而垂直轴风力发电机恰恰能克服这些缺点,并且垂直轴风机以其安装成本低,维护方便,可靠性好等已经备受人们瞩目[2]。
目前,垂直轴风机大多采用定桨距结构,导致系统风能利用率低和自启动性能差[3]。本文重点研究了垂直轴风机的数学建模和机构设计,理论上通过静止时的变桨受力分析提高其自启动能力,通过旋转时的变桨算法提高其风能利用率;并且在机构设计上,利用伺服电机的精确性和蜗轮蜗杆减速机的自锁功能完善垂直轴风机变桨距系统。
1 小型H型风机机构
本文根据垂直轴风力发电机变桨距理论,制造了一台小型H型风机作为研究对象,并且在机器构造上进行了改造,不同于一般的H型风机。总体而言,设计出的风机,机械构造上简单,方便操作,成本低,而且达到了精确的目的。
1.1 风机整体结构
风机主轴上下两端采用轴承6206,内径30 mm,外径62 mm,厚度16 mm.
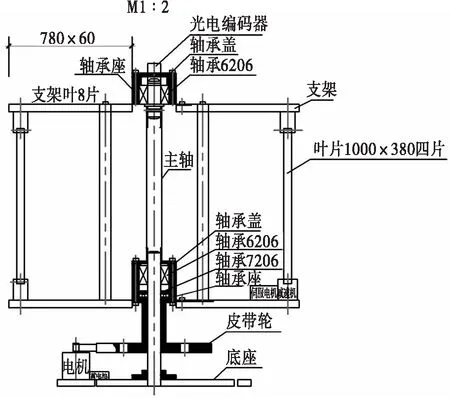
图1 风机剖面图Fig.1 Cross section of fan
如图1所示:风机总高1 790 mm,总宽1 685 mm,叶片四片1 000×380 mm.
风轮的直径由公式P=Cpρ/2V3π/4D2η求得。
其中:P为发电机功率,本文取200 W,Cp为风能利用系数,低速风机一般在0.35左右,ρ为空气密度,取1.29 kg/m3,V为风速,本文取10 m/s,η为传动效率与风车效率的积,一般取0.8~0.9,代入求得风轮直径约为1.6 m.故将支架设计成780 mm[4].
1.2 风机独立变桨机构

图2 变桨机构Fig.2 Variable pitch mechanism
如图2(a)所示:
光电编码器:设置在主轴顶端,在此风机中的作用是,采集转速信号,提供给控制器DSP.根据转速信号的采集知道叶片位置,通过程序计算当前位置的最佳攻角。编码器的型号是长春东泽光电有限公司生产的ZKX-6-50BM-G12E光电编码器。
如图2(b)所示:
变桨伺服电机:考虑到变桨距的角度精度问题,本设备采用精确性和稳定性高的伺服电机。此风机变桨系统中采用的是淄博立驰直流电机厂生产的伺服电机,型号为LC70-24BM直流伺服电机,电压12 V,转速5 200 r/min,功率100 W,电流11 A.
涡轮蜗杆减速机:选择涡轮蜗杆减速机的原因在于它的反向自锁功能,并且其具有较大的减速比。风机叶片旋转,当到达特定区域后,需要保持桨距角不变,蜗轮蜗杆减速机的自锁功能就能使叶片在特定位置停止不动。减速机的减速比为1∶50.本次设计选用的是刚性连接,即叶片直接通过联轴器和蜗轮蜗杆减速机相连,相对了同类型机器的链条传动(柔性连接),提高了变桨系统的稳定性,减小了振动[5]。
图3所示就是上文论述中的机器成品图,从外观上看,结构简单明了,蓄电池给伺服电机供电,伺

图3 机器成品图Fig.3 The finished chart
服电机连接蜗轮蜗杆减速机带动叶片转动,该设备成本低,性价比高,合适实验用。目前,只做了一个轴的变桨距机构,先对单个轴进行研究。
2 垂直轴风力发电机的数学建模
2.1 叶片的受力分析
垂直轴风力机有升力型(Darrieus)和阻力型(S型)两大类。本文重点研究升力型H型风机,对阻力型风机暂不介绍。H型风机在低风速下运行困难,要在较高风速下,叶尖速比达到3.5以上才可能正常运转,在叶尖速比在4~6可获得较高的输出功率,所以H型风机不能单靠风力自启动,通常情况下,是要发电机作电动机带动风力机旋转。由于对风速变化和负荷变化要求比较苛刻,效率难以达到高效稳定,所以本文采用变桨距策略,通过对桨距角的变化,来配合风速风向提高风机的自启动能力和风能利用率,首先应对其进行数学建模,如下所述:

图4 叶片受力分析图Fig.4 Aerodynamic analysis of blade
(1)
式中:W为相对风速;V为风速;w为风轮旋转的角速度;r为风轮旋转平面的半径;θ为叶片所处位置的方位角。
根据空气动力学可知,叶片旋转时候的受力有两个,一个是与相对速度W平行的阻力Fd,一个是与相对速度W垂直的升力Fl[6-8].
升力:
(2)
阻力:
(3)
式中:Fl为升力;Fd为阻力;a为常数,空气密度ρ与叶片弦长c的乘积;Cl为升力系数;Cd为阻力系数。
对升力Fl与阻力Fd进行分解,方向为叶片和切向和法向,得到使得叶片旋转的切向力f切与向心力f向.
f切=Flsini-Fdcosi
(4)
法向力f向:
f向=Flcosi+Fdsini
(5)
其中:f切为切向力,f向为法向力,也叫作向心力;i为攻角。
为了便于分析叶切向力与向心力的变化情况,对翼型叶片的升力系数Cl与阻力系数Cd进行多项式拟合[9-11]。取(-20,-0.15),(-10,-0.2),(0,0.5),(10,1.5),(20,0.5)进行分段拟合,得到风轮的升力系数曲线的多项式,即为:
Cl=-0.002i2+0.08i+0.4
(6)
取(-10,0.3),(0,0.1),(10,0.3)进行拟合,得到叶片阻力系数曲线的多项式为:
Cd=0.0003i2+0.05
(7)
2.2 叶片变桨距受力分析
本文以6叶片风机进行变桨距理论分析。本文公式中:ρ=1.29,w=40,r=1,V=10,c=1.
2.2.1 叶片静止时受力分析
将式(2)-式(7)联立,可以求的ft表达式,需要注意的是当叶片静止时,式中W=V,再对其求导得出攻角i,就能够知道静止时,风轮一周所受转矩力最大的角度,因此我们可调节叶片在该位置的桨距角,目的就是要提高垂直轴风机的自启动能力。图5中,实线为变桨前,虚线为变桨后。
如图5可知静止时:
1)叶片1,此时只受法向力,不产生驱动风轮转动的力矩,故要使叶片1旋转一个角度,使其对叶片1产生驱动。
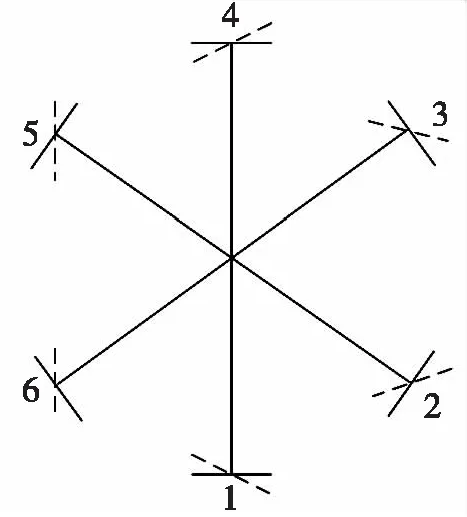
图5 叶片静止受力分析Fig.5 Aerodynamic analysis of static blade
由式f切=Flsini-Fdcosi,求得当i=45°,ft最大,故将此叶片逆时针旋转15°,使其α=45°,此时所产生的转矩最大。
2)叶片2,静止时,i=30°,受转矩力为正,通过计算,将叶片2顺时针旋转15°,使其获得最大转矩。
3)叶片3,静止时,攻角i=30°,所受转矩力为正,通过计算,将叶片3逆时针旋转15°,使其获得最大转矩。
4)叶片4,静止时,此时叶片4也只受法向力,且此法向力方面是背离中心轴,为反向的。
5)叶片5,i=30°,受的转矩力仍为负向转矩力,故使叶片5绕自身旋转轴逆时针旋转30°,使叶片与风向平行,不受力。
6)叶片6,通过受力分析可知,当其静止时,叶片所受转矩力为负,故使叶片顺时针旋转30°,使叶片6不受力。
由上述分析知:静止时,6叶片垂直轴风力机,除0°和180°两叶片攻角为90°,其余4个位置均为30°。
2.2.2 叶片旋转时的受力分析
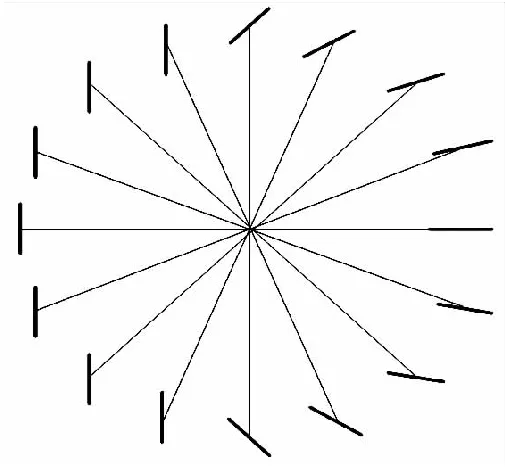
图6 叶片旋转一周示意图Fig.6 Diagram of blade rotation cycle
如图6所示,方位角处于180°~360°时,由于叶片作负功,故使叶片全部成顺桨状态,使其不受力,如图右半部分,只需要计算方位角在0°~180°时,叶片当前位置的最佳攻角。


(8)
风机启动和运行状态流程如图7所示:
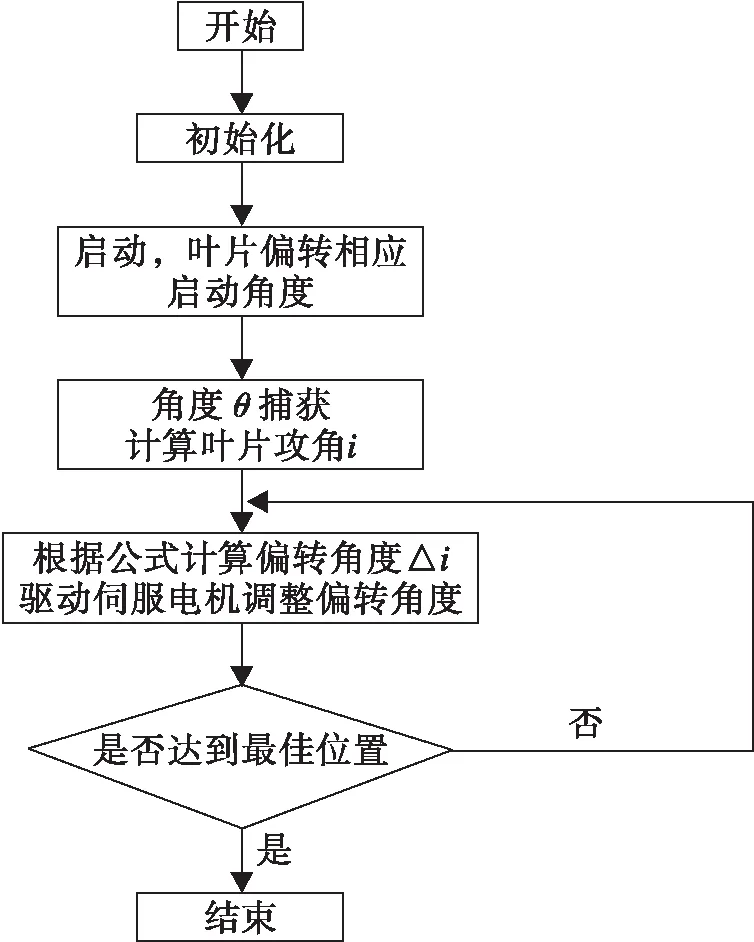
图7 软件流程图Fig.7 Flow chart of software

通过Matlab结果可以确定单个叶片旋转一周攻角i的最佳变化情况以及maxf切,6个叶片之间,相邻叶片之间相差方位角为60°,确定一个叶片的攻角变化和受力情况下,只需要移动60°的相位角就可以得出相邻叶片的受力情况,然后对6个叶片的合切向力f切进行相加得到总合力Ft,仿真结果如图8所示。
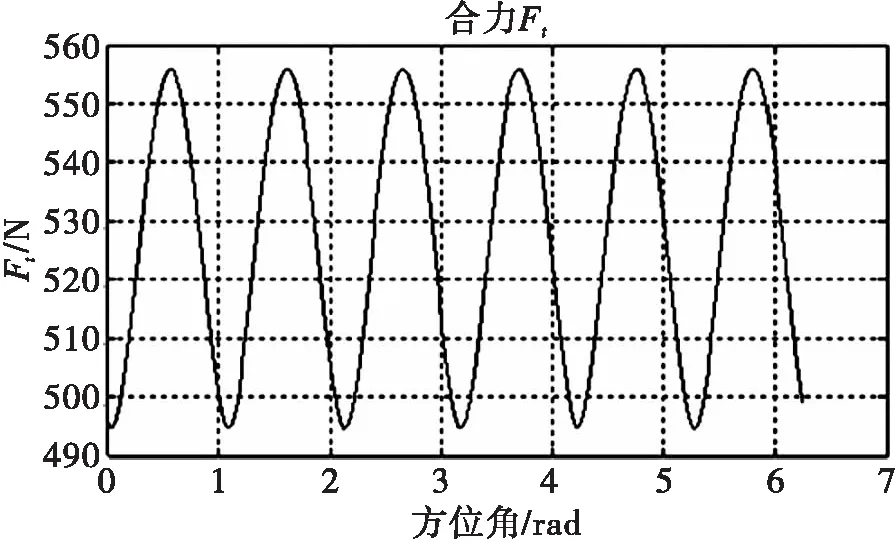
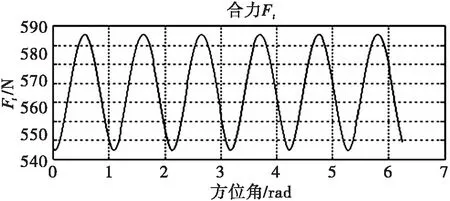
(a)变桨前合力与的关系(b)变桨后合力与的关系图8 变桨前后合力与方位角的关系Fig.8 The relationship between Ft ang before andafter variable pitch
由图8可得:图8(a)图为定桨距情况下6叶片的合切向力情况,攻角为定值。图8(b)按照仿真结果变桨后的合切向力情况,变桨后的合切向力比变桨前的合切向力大,风能利用率高,并且幅值跨度小,振动小。
3 结束语
本文的重点是对H型垂直轴风力机变桨距控制的理论分析和硬件展示,分析了它静止和旋转时的受力情况,使得变桨距H型风机能够通过对桨距角的控制,改善其自启动性能、提高其风能利用率。同时设计了一种小型H型垂直轴风机,采用独立变桨机构,从机械结构上说,比同类机械简单明了,成本低,性价比高,接下来需要做的就是完善变桨距数学模型的建模以及对机器精确度和稳定性的改善。
参考文献:
[1] 田海姣,王铁龙,王颖.垂直轴风力发电机发展概述[J].应用能源技术,2006(11):22-27.
[2] 孙丽梅.风能利用现状及前景分析 [J].内蒙古电力技术,2010(6):9-16.
[3] 谢歆,王春琪.基于 DSP 的风机变桨距控制研究[J].微计算机信息,2010(26):120-121.
[4] 倪受元.风力机的工作原理和气动特性 [J].太阳能,2000(3):13-16.
[5] 栗玉杰,安红萍,云晖,等.大型轴类锻件新型凸面砧拔长研究[J].太原科技大学学报,2013,34(6):429-434.
[6] 贺德馨.风工程与空气动力学[M].北京:国防工业出版社,2006.
[7] 汉森.风力机空气动力学[M].北京:中国电力出版社,2012.
[8] 高峰,徐大平,吕跃刚.基于叶素理论的风力发电机风轮建模[J].现代电力,2007,24(6):52-57.
[9] 张德丰.MATLAB语言高级编程[M].北京:机械工业出版社,2010.
[10] MARINI M,MASSARDO A,SATTA A,et al.Theoretical aerodynamic methods for VAWT analysis[C]∥Energy Conversion Engineering Conference,Proceedings of the 24th Intersociety.IEEE,1989:2021-2027.
[11] MISIR D,MALKI H A,CHEN G.Design and analysis of a fuzzy proportional-integral-derivative controller[J].Fuzzy sets and systems,1996,79(3):297-314.
猜你喜欢
山东冶金(2022年1期)2022-04-19
哈尔滨轴承(2020年3期)2021-01-26
通信电源技术(2020年17期)2020-12-28
哈尔滨轴承(2020年1期)2020-11-03
太阳能(2019年10期)2019-10-29
中医眼耳鼻喉杂志(2019年2期)2019-04-13
太阳能(2019年1期)2019-02-14
中国金属通报(2019年5期)2019-01-03
风能(2016年9期)2016-12-21
山东工业技术(2016年15期)2016-12-01
