海上风机半潜式基础概念设计与水动力性能分析
2014-06-15 17:07:19唐友刚桂龙曹菡秦尧
哈尔滨工程大学学报 2014年11期
唐友刚,桂龙,曹菡,秦尧
(1.天津大学建筑工程学院,天津300072;2.天津大学水利工程仿真与安全国家重点实验室,天津300072)
海上风机半潜式基础概念设计与水动力性能分析
唐友刚1,2,桂龙1,2,曹菡1,2,秦尧1,2
(1.天津大学建筑工程学院,天津300072;2.天津大学水利工程仿真与安全国家重点实验室,天津300072)
针对5 MW海上风机动力响应较大的问题,提出了半潜型浮式基础的概念设计,研究了半潜式浮式基础在不同风浪环境下的运动响应和生存能力。考虑叶片空气动力载荷及风浪载荷,以及浮式基础与系泊系统的耦合,建立风机结构系统及水动力模型,采用动量-叶素理论计算叶片空气动力载荷,在频域范围内计算了载荷传递函数。计算分析浮式基础风机系统不同风浪情况下的时域动力响应,评估了半潜型浮式基础在极限海况下的生存能力。结果显示,半潜型浮式基础运动性能良好,且在极端海况下,各系泊缆安全系数均大于1.67,破损状况下安全系数均大于1.33,该浮式基础及其系泊系统具有足够的抵抗极端海况的能力。
海上风机;半潜式浮式基础;运动响应;生存能力;系泊系统;安全系数
海上风机系统属于高耸结构,水平风载荷和垂向自重载荷数量级相当,导致浮式基础产生大幅摇摆运动,风机上的风速发生波动,从而引起发电功率的波动,发电效率降低[1]。国内外学者对驳船式、半潜式、TLP式、Spar式等浮式基础进行了研究[2-8],并对风机基础的时域与频域运动响应进行了一系列分析。通过针对TLP型浮式基础的全耦合分析结果表明,综合考虑空气动力载荷及水动力载荷对浮式风电系统整体的影响是必要的[7]。而模型试验的结果也验证了这一观点,针对5MW浮式风机基础进行的模型实验结果表明,塔柱的固有振动频率会受结构基础的影响,风载荷可增大Spar型基础的波频运动[8]。
目前浮式基础的研究工作,对于二阶力和绕射力共同作用引起的浮式基础运动的研究还较少,而对于浮式基础极端海况下的生存能力研究还很不够。本文建立包括发电系统-塔柱-浮式基础等在内的整体模型,考虑叶片空气动力载荷、波浪二阶力和波浪绕射载荷,计算风机浮式基础的整体运动,考虑极端海况评估浮式基础的生存能力。
1 半潜型浮式基础概念设计
1.1 浮式基础模型参数
本文参照美国可再生能源研究所公布的5 MW风机[9],概念性地设计了一种半潜型浮式基础。

表1 浮式基础设计主尺度Table 1 Main parameters of the floating foundation

表2 5 MW风机质量参数Table 2 Mass parameters of the 5 MW wind turbine

图1 整体分析模型Fig.1 Global analysis model
半潜型基础结构主要由3个立柱与支撑杆件构成。在立柱下缘设计大尺度的正六边形压水板[1],以减小浮式基础的运动。在3个立柱底部采用混凝土压载,以达到降低重心与提高稳性的目的。3个立柱围绕塔柱对称等距布置,两两间隔46 m。主要设计参数如表1。整体模型主要重量参数如表2。风机系统整体模型如图1所示。
1.2 浮式基础系泊设计
每个立柱上设一组系泊锚链,每组包括3根有档锚链。锚链有效弹性模量E=5.45×107kN/m2,与E相对应的截面积A=πd2c/2,其中dc为锚链公称直径,为92 mm。锚链拉断试验负荷为6 080 kN,每米理论质量为185.4 kg/m。每根锚链长560 m,每组内锚链延长线相交于等边三角形的中心,每组内2根锚链的夹角为30°。相邻2组之间的夹角为60°,导缆孔位于立柱下缘,锚链分布的示意见图2。

图2 锚链分布示意图Fig.2 Chain layout diagram
2 计算分析理论
2.1 风载荷
2.1.1 叶片载荷
叶片载荷采用动量-叶素理论进行计算。作用在每个叶素上的推力和力矩[10]为
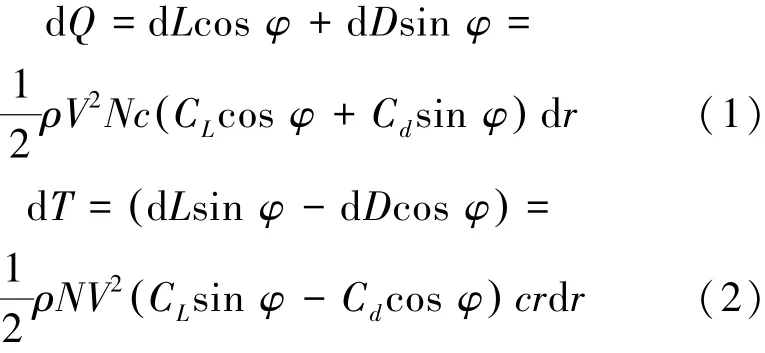
式中:ρ为空气密度,L、D分别为叶素上的升力和拖曳力,V为叶片上的相对速度,N为叶素数量,c为叶素剖面弦长,CL、Cd分别为升力系数和拖曳力系数,通常可由风洞试验测得,φ为入流角,r为叶素与轮毂中心的距离,dr为每个叶素的展向长度。在计算得到风机叶片载荷后,根据叶片载荷等于风力系数、受风面积、风速平方三者乘积的关系,计算风力系数,用于风机浮式基础的时域响应计算。
2.1.2 塔柱载荷塔柱风载荷[1]按照下式计算:

式中:Ch为塔柱的高程系数,Cs为塔柱形状系数,Ai(α)为风向角为α时第i个受风构件在风向上的投影面积,v为风和结构物的相对速度。
2.1.3 极限海况风载荷计算
极限海况下风轮处于顺桨停转状态,风轮承受风载荷的方式发生改变。若将最大瞬时风速定义为极限风速,则极限风载荷可参照下式进行计算:

式中:Fwind是极限风载荷,CD1和CD2分别是风轮和塔架的风阻力系数,ρa是空气密度,Umaxd是极限风速,Aw为风轮的迎风面积,H=90 m为轮毂高度,f(h)是高度h处的塔架截面直径。
2.2 波浪载荷
采用Morison公式计算撑杆所受波浪载荷[1]:

式中:ρ为海水密度,CM为惯性力系数,CA为附连水质量系数,CD为拖曳力系数,u和u·分别为撑杆轴线垂直投影方向的水质点速度和加速度,x·和x¨分别为撑杆在其轴线垂直投影方向上的速度与加速度。
立柱及压水板上的波浪载荷采用三维势流理论计算。速度势φ为入射势φI、绕射势φD与辐射势φR之和,其中:

式中:g为重力加速度,A为波幅,K为波数,d为水深,β为波向角。
2.3 时域运动控制方程
系泊浮体在风、浪、流作用下的时域运动方程[1]为

式中:Mki为惯性系数;Lki(t-τ)为辐射阻尼的迟滞函数;Bvki为粘滞阻尼系数;Kki为基础的静水回复刚度系数;Kkim为系泊系统提供的回复刚度系数;Fi(t)为波浪力,包括一阶与二阶成分;FiW为风载荷;FiC为流载荷。
3 波浪力传递函数与幅频运动响应函数计算
建立了包括风机、塔柱、基础在内的水动力分析模型,工作水深为120 m,选择的波浪周期范围为2~60 s,时间间隔为2 s,波高为2 m,进行传递函数与幅频运动响应函数(RAOs)的计算。
3.1 水动力计算模型
选取的坐标系:取3个立柱中心构成的三角形形心为坐标系原点;Z轴与塔柱的中心轴重合向上为正;X轴和Y轴的零点位于塔柱中心。模型整体关于X轴对称。考虑绕射效应,立柱和压水板采用面元模型,斜撑和水平撑等小尺度构件采用Morison模型。使用SESAM软件建立水动力模型如图3。
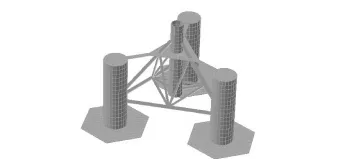
图3 水动力分析模型Fig.3 Hydrodynamic analysis model
3.2 波浪力计算
3.2.1 波浪力传递函数
考虑不同的浪向,采用势流理论计算波浪力传递函数。图4分别是平台纵荡,垂荡和纵摇的波浪力传递函数计算结果。由图4可知,纵荡波浪力峰值周期在5~10 s。垂荡波浪力则随着波浪周期的增加呈现先增大再减小,然后又增大的趋势。波浪力激起的运动主要表现为平衡位置的高频运动。


图4 纵荡、垂荡与纵摇一阶波浪载荷传递函数Fig.4 Wave load transfer function of surge,heave and pitch
3.2.2 平均波浪漂移力
平均波浪漂移力是二阶波浪载荷的定常部分,平均波浪漂移力会影响系泊浮体的平衡位置。

图5 纵荡与横荡平均漂移力Fig.5 Mean wave drift force of surge and sway
使用远场法,针对不同的浪向,计算得到半潜型基础在1、2、6三个自由度的二阶平均波浪力MDF(mean drift force)。图5为纵荡和横荡平均波浪漂移力。由图5中看出,周期在20~30 s,平均波浪漂移力较大,因此应该避免浮式基础的固有运动周期落入20~30 s的范围。
3.3 幅频运动响应函数计算
图6为基础在不同浪向下,垂荡与纵摇的幅频响应函数。从图中可以看出基础垂荡与纵摇的固有周期分别约为22 s与26 s左右。在时域分析中,所选取的海浪谱能量集中范围大致为4~20 s,基础垂荡与纵摇的固有周期均偏离这一范围,在波频范围内基础运动不会发生大幅共振,这一点可通过时域计算的结果进行检验。
在基础幅频运动响应函数的计算中,考虑了粘性的影响,其中包含压水板、杆件及其他构件的作用。按文献[5]的建议,粘性阻尼取为基础临界阻尼的10%。

图6 垂荡与纵摇幅频响应函数Fig.6 RAOs of heave and pitch motion
4 时域动力响应分析
综合考虑了波频力、平均波浪力、海流力、风力以及基础与系泊系统之间的耦合,使用等效的方法考虑叶片空气动力载荷和SESAM中的DeepC软件,计算不同海况下海上风机整体的运动响应以及缆绳的动态张力。
4.1 环境参数的选取
时域分析中,取半潜型浮式基础的工作水深为120 m,海况的选取如表3所示,波浪采用JONSWAP谱描述,谱峰参数取为3.3,波浪入射角与X轴夹角为0,共选取4种海况如表3所示。风速取为11.4 m/s,表面流速取为0.39 m/s。
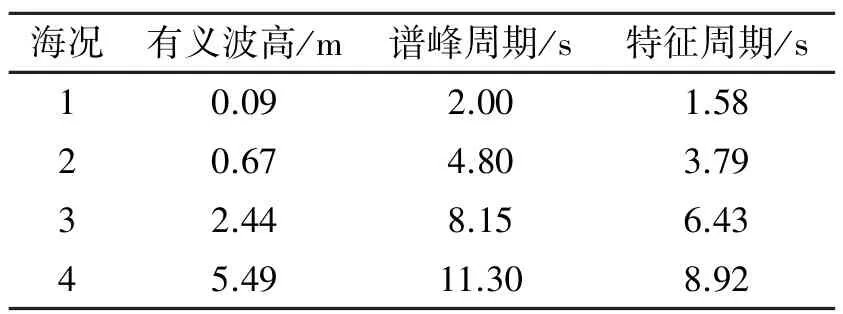
表3 浮式风机作业海况Table 3 Operating sea states of the wind turbine
4.2 时域计算模型
在DeepC中建立整体的分析模型如图7所示,其中图7的箭头表示指定的外力,用于补偿锚链的预张力,使浮体在SESAM的2个模块HydroD和DeepC中吃水保持一致。
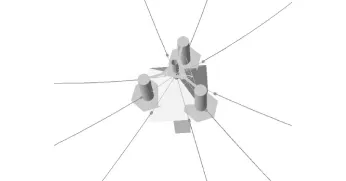
图7 时域分析模型Fig.7 Analysis model in the time domain
4.3 时域计算结果分析
选取额定风速为11.4 m/s,当风速达到25 m/s(切出风速)时,风机处于顺桨停转状态。Zambrano等指出,正常发电时,浮式风电系统的平均俯仰角需小于±5°,动态俯仰角需小于±15°,这种情况下风机能正常发电[11]。

表4 时域计算统计结果Table 4 Statistic results of time domain analysis
根据DNV规范的方法[12],确定运动响应的最大值,进行多次(如10~20次)3 h的时域模拟,统计每次时域模拟的极大值,然后求取该极值样本的均值,作为响应的最大值。本文使用DeepC软件,改变其中的随机种子参数,进行了10次计算,得到4种海况下浮式基础运动响应的统计结果,如表4。由表可知,在额定风速下,纵荡运动的最大幅值约为3.2 m,垂荡运动的最大幅值约为1.04 m,纵摇运动的最大幅值约为2°。3个自由度方向上的运动响应均满足相关规定,系泊缆索的安全系数也大于规范要求的2.5。由此判断,所设计的半潜型浮式基础在工作海况下,其运动响应和张力响应均是安全的。
5 极限海况下基础生存能力评估
5.1 极限海况参数
极限海况参数选取如下所示:水深120 m;风速40 m/s;海流使用剪切流,表面流速为2 m/s;有义波高7.5 m,谱峰周期13.0 s。同样假定风、浪、流同时作用在一个方向上(与X轴成零度夹角),同时考虑浮式基础与系泊系统的耦合效应,对半潜型浮式基础进行时域分析。
5.2 半潜型基础时域运动响应
由于时域分析一般的模拟时间为3 h,时域结果具有随机性,根据DNV规范,使用多次计算求取平均值的方法得到统计结果如表5所示,其中,系泊系统完好状态下,半潜型浮式基础的静平衡位置为(3.61,2.28,0)。

表5 时域计算统计结果Table 5 Statistic results of time domain analysis m
5.3 系泊张力分析
作用在锚链上的力包括水动力、重力和张力等等,考虑质量、阻尼和流体加速度等随时间变化的效应,在时域范围内对锚泊系统的张力进行分析。
5.3.1 完整状态下系泊张力分析
根据CCS的相关规范[13],锚链或钢缆安全系数极端海况分析取1.67,破损极端海况取1.33。由表6可知,在极限海况下,系泊系统完整的状态下,缆绳的安全系数均大于规范要求的1.67,即系泊系统依然安全。
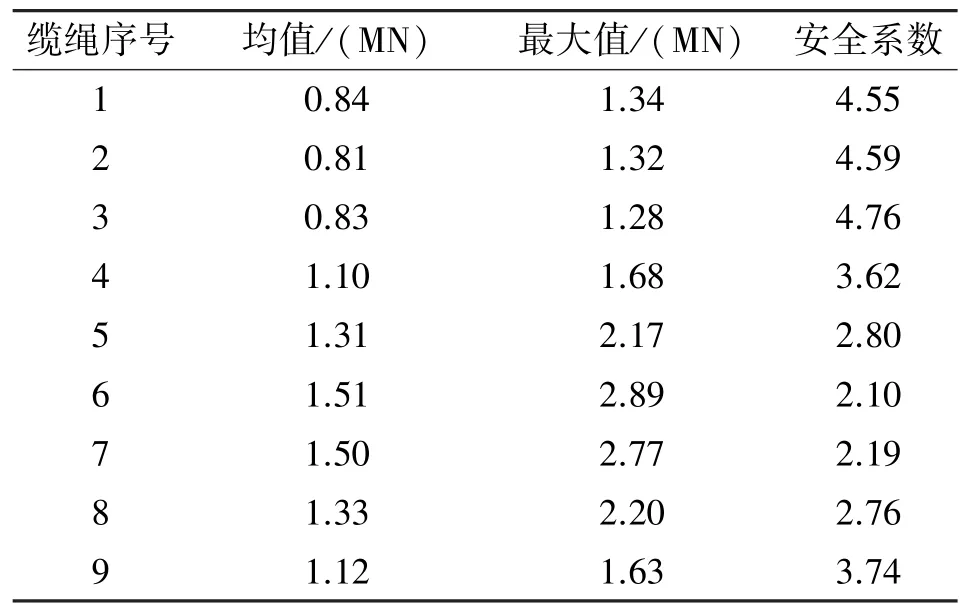
表6 完整系泊状态锚链张力统计结果Table 6 Statistic results of the tensions in intact condition
5.3.2 破损状态下系泊张力分析
选取风浪流同向,与X轴夹角为零度,进行计算,考察浮式风机系统的自存能力。选择零度浪向下受力最大的锚链作为破损链(锚链破损时系泊系统俯视图如图8,计算分析在一根锚链发生断裂而其他锚链完好状态下系泊张力,其统计结果如表7。

图8 6号锚链破损时系泊系统示意图Fig.8 Mooring system diagram as chain 6 broken

表7 破损系泊状态锚链张力统计结果Table 7 Statistic results of the tensions in damage condition
由图8可知,7号锚链上的张力最大,其安全系数为1.43,大于规范要求的1.33,表明极限状态下,其余安全系数均大于1.67,这表明系泊系统的生存能力仍然满足CCS规范要求。
6 结论
1)本文提出的半潜式浮式基础的结构形式、基本尺寸和系泊的布置,基本性能满足正常发电要求。2)在极端海况下,环境载荷的增加会改变风机系统的平衡位置,其对响应的影响需进一步考虑。3)本风机系统具有较长的固有周期,与海域波浪的谱峰周期错开较大,故发生谐振运动的可能性较小,这是本风机系统重要的动力特性。4)锚链的有效直径较大,可以调整降低锚链的有效直径,进一步优化系泊系统的设计。
本文计算时,没有考虑发电机及其控制系统的动力效应,这在后续研究工作中应该考虑。
[1]阮胜福.海上风电浮式基础设计与运动响应研究[D].天津:天津大学,2010:6-7.RUAN Shengfu.Study on the dynamic response for floating foundation of offshore wind turbine[D].Tianjin:Tianjin University,2010:6-7.
[2]PHILIPPE M,BABARIT A,FERRANT P.Comparison of time and frequency domain simulations of an offshore floating wind turbine[C]//ASME 2011 30th International Conference on O-cean,Offshore and Arctic Engineering OMAE2011.Rotterdam,Netherlands,2011:589-598.
[3]SULTANLA A,MANUEL L.Long-term reliability analysis of a spar buoy-supported floating offshore wind turbine[C]//ASME 2011 30th International Conference on Ocean,Offshore and Arctic Engineering OMAE2011.Rotterdam,Netherlands,2011:809-818.
[4]ZHAO Jing,ZHANG Liang,WU Haitao.Motion performance and mooring system of floating offshore wind turbines[J].Journal of Marine Science and Application,2012,11(3):328-334.[5]ZHAO Y,YANG J.Concept design of a multi-column TLP for a 5 MW offshore wind turbine[C]//ASME 2012 31st International Conference on Ocean,Offshore and Arctic Engineering OMAE2012.Rio de Janeiro,Brazil,2012:OMAE 2012-83245.[6]JONKMAN J,BUTTERFIELD S,MUSIAL W,et al.Definition of a 5 MW reference wind turbine for offshore system development[R].NREL/TP-500-38060.Washington D.C.NREL,2009:2-16.
[7]李军向.大型风机叶片气动性能计算与结构设计研究[D].武汉:武汉理工大学,2008:21.LI Junxiang.Research on the aerodynamic performance calculation and structural design of large-scale wind turbine rotor blade[D].Wuhan:Wuhan University of Technology,2008:21.
[8]ZAMBRANOT,CREADY T M,JR T K,et al.Dynamic modeling of deepwater offshore wind turbine structures in Gulf of Mexico storm conditions[C]//Proceedings of 25th International Conference on Offshore Mechanics and Arctic Engineering OMAE2006.Hamburg,Germany,2006:OMAE 2006-92029.
[9]Det Norske Veritas.DNV-OS-E301 position mooring[Z].Norway:DNV,2010:39.
[10]中国船级社.海上单点系泊装置入级与建造规范[Z].北京:人民交通出版社,1996:5-8.
Conceptual design and hydrodynamic performance of the semi-submersible floating foundation for wind turbines
TANG Yougang1,2,GUI Long1,2,CAO Han1,2,QIN Yao1,2
(1.School of Civil Engineering,Tianjin University,Tianjin 300072,China;2.State Key Laboratory of Hydraulic Engineering Simulation and Safety,Tianjin University,Tianjin 300072,China)
The semi-submersible floating foundation was conceptually designed to support a generic 5 MW wind turbine that has a large response to hydrodynamics.The motion responses and survivability of the floating foundation were analyzed under different wind and wave environments.The structure system of wind turbine and the hydrodynamic model were established using loads of blade aerodynamics,loads of wind and wave,and coupled floating foundation and mooring system.The blade aerodynamic load was obtained by the blade element momentum theory and the load transfer function was calculated in the frequency domain.The dynamic responses in the time domain was calculated under different wind and wave circumstances for the wind turbine of the floating foundation.The survivability of the semi-submersible floating foundation under extreme sea conditions was assessed.It is shown that the motion performance of the semi-submersible floating foundation is good.Furthermore,under extreme sea states the safety factor of each mooring line was seen as being above 1.67.The safety factor of all of the other lines was above 1.33,which included one line broken.It is proven that the floating foundation and its mooring system have enough capacity of resisting extreme sea state.
marine wind turbine;semi-submersible floating foundation;motion response;survivability;mooring system;safety factor
10.3969/j.issn.1006-7043.201303003
http://www.cnki.net/kcms/doi/10.3969/j.issn.1006-7043.201303003.html
P752
A
1006-7043(2014)11-1314-06
2013-03-07.网络出版时间:2014-09-29.
教育部高校博士点基金资助项目(20110032110041);国家自然科学基金资助项目(51279130);创新群体基金资助项目(51321065).
唐友刚(1952-),男,教授,博士生导师.
唐友刚,E-mail:tangyougang_td@163.com.
猜你喜欢
江苏船舶(2023年2期)2023-06-14 11:07:44
云南化工(2021年5期)2021-12-21 07:41:52
船海工程(2021年6期)2021-12-17 03:17:44
装备制造技术(2020年3期)2020-12-25 05:22:08
船舶标准化工程师(2020年1期)2020-06-12 09:16:24
建材发展导向(2019年10期)2019-08-24 06:24:52
石油化工建设(2018年2期)2018-07-11 01:24:58
电器工业(2016年8期)2016-03-08 04:44:05
船海工程(2015年4期)2016-01-05 15:53:38
应用海洋学学报(2015年3期)2015-11-22 07:39:14