六自由度液压并联机器人结构优化设计
2014-05-10 07:47刘兰波唐志勇裴忠才
机床与液压 2014年23期
刘兰波,唐志勇,裴忠才
(北京航空航天大学自动化科学与电气工程学院,北京100191)
0 前言
六自由度液压并联机器人是一种应用比较广泛的并联结构。它是1965年被STEWART D[1]首先提出来的。后来经过慢慢的改进与发展,便逐渐演变成了如图1所示的结构。

图1 六自由度液压并联机器人
它由上下两个平台组成,下平台是定平台,上平台是动平台,上下平台之间用6 根可变长度的杆件来连接。并联机器人与串联器人相比,具有以下特性:(1)刚度大,结构稳定;(2)具有较强的承载能力;(3)运动精度高;(4)动态性能好;(5)并联机器人正解容易,逆解困难,此与串联机器人正好相反。由于并联机器人具有以上的特点,故其在很多领域都得到了广泛的应用[2],比如并联机床、飞行模拟器等。
并联机器人的正运动学主要分为解析法和数值法两种,前者主要是通过消元法消去机构方程中的未知数,从而使机构的输入输出方程为仅含一个未知数的高次方程。其特点是不需要初值并可能求解出全部解[3],但数学推导复杂,在实际控制中没有实用价值;后者需要求解一组非线性方程,从而求得与输入对应的动平台的位置和姿态[4]。数值法不能保证解出全部解,但计算方法简单,对实时仿真和控制具有实用价值。因此文中第一部分对6-3 模型的六自由度并联机器人提出了一种快速的数值解法。第二部分分析了此并联机器人的运动空间。最后鉴于传统复合球铰的缺点,设计了一种复合虎克铰。
1 6-DOF 并联机器人正运动学分析
如图2所示,当平台变成下六铰点上三铰点(6-3)的机构时,连接到同一个上铰点的两个油缸,可以看做绕固定轴旋转的虚拟杆。如A16B1和A16B2可以看做是一个绕B1B6旋转的杆A16B16,长度为R16,设两个杆长分别为l1和l6,A16B16与Z轴夹角为α16,B1B16=d1,B6B16=d6


图2 6-3 型并联机器人结构等效图
解式(1)得


设α16为R16与Z轴的夹角,图示方向为正,杆R16的上端b16的坐标为
同理对于b23和b45也可以表示出来。
设:

令

解方程组(5)可以得到α16,α23,α45的解析解。
解析解法计算量太大,无法应用于实时控制,文中采用Newton 法解这个非线性方程,可以得到方程的数值解。
令
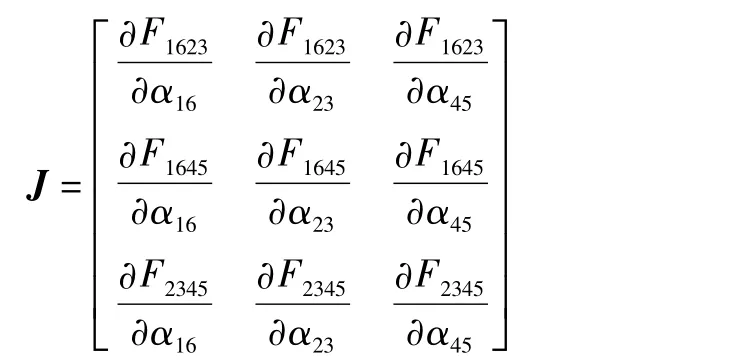
所以求解方程组(5)的迭代公式为

相对于6-6 的结构中需要求解6 个变量,该算法只需要计算3 个变量便可确定上平台位姿,计算量可以显著减少。
2 并联机器人的工作空间分析
机器人的工作空间是机器人的执行端可以到达的空间区域,它是衡量机器人性能的一个很重要的指标。一般来说,并联机器人工作空间的求解方法有数值法和解析法两种。在解析法方面,由于其比较依赖于机构位置解的研究结果,目前还没有很好的方法。而数值解主要以求工作空间的边界为目的,并且直接计算出工作空间的大小,表现直观,目前应用也比较广泛[5]。
影响并联机器人工作空间的因素主要有3 个方面:杆长的限制、转动副转角的限制和连杆之间干涉的限制。在已知机器人初始状态的情况下,利用Matlab 软件对机器人工作空间进行分析。其程序流程如图3所示。
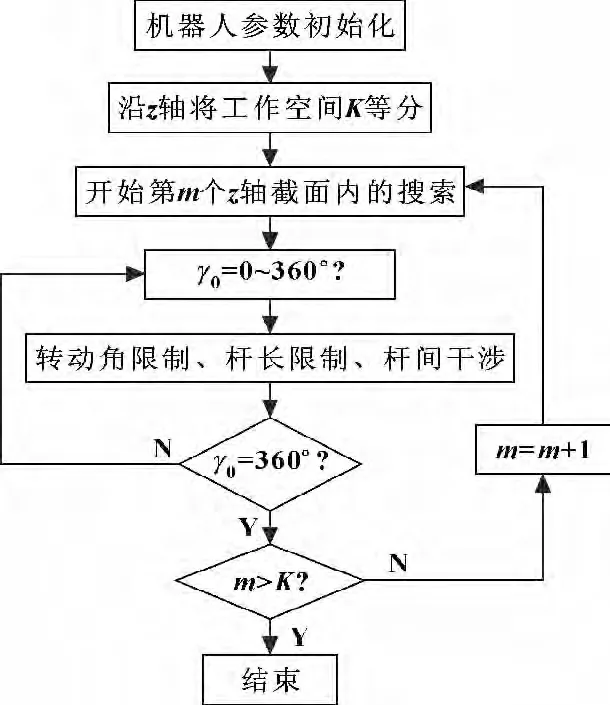
图3 程序流程
应用Matlab 程序搜索出不同姿态下并联机器人的三维工作空间,如图4所示。
由仿真结果可以看出,并联机器人上平台中心的工作空间最低点位504 mm,最高点位786 mm;工作空间绕Z轴对称;并联机器人的工作空间由上部的凸面和下部的凹面包围而成。仿真证明该结构拥有相对足够的工作空间。
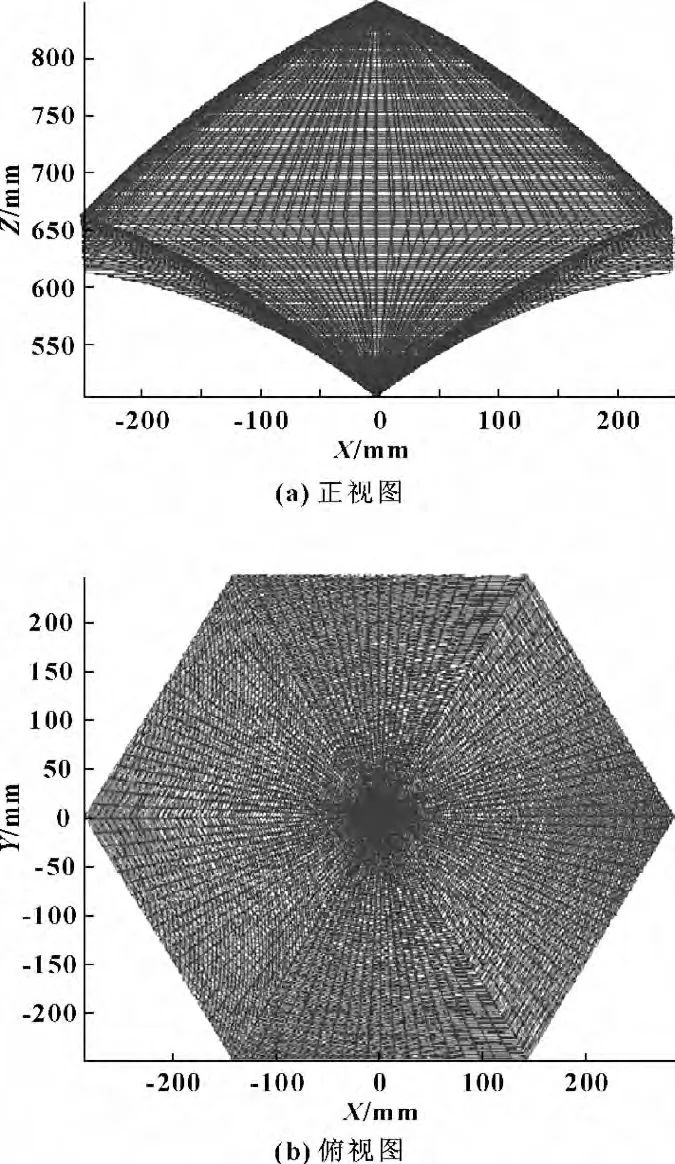
图4 并联机器人的工作空间
3 结构优化设计
3.1 整体结构
根据运动学正解和工作空间的分析,整体采用下6 上3 的结构,如图5所示。

图5 优化设计后的并联机器人
3.2 复合虎克铰的设计
长久以来,对于复合球铰的设计一直是个难题。要实现两个球铰球心重合的效果,现在普遍的设计方法是使用大小两个球铰进行重合叠加。这种结构存在着两个问题:一是转动范围很小;二是加工复杂且可恢复性差。基于以上存在的问题,需要设计一种复合虎克铰,这种结构要具有3 个自由度。最初,设计了图6所示的结构。此结构的设计中,上音叉的转动轴穿过两个下音叉的转动轴,但通过应力校核分析发现,该结构的尺寸还是比较大的。基于在满足强度要求的前提下结构紧凑和体积最小的原则,做进一步改进。滑动轴承具有体积小,能够承受巨大的冲击与振动载荷等优点。因此在此应用滑动轴承进行设计。其三维机械结构如图7所示,它具有结构紧凑、简单,刚性大,转动范围大,容易加工的优点。

图6 最初设计

图7 最终设计
通过3 个转轴来实现3 个方向的转动。其中活塞杆内音叉和活塞杆外音叉共用一个轴,且该轴与上音叉的转轴构成可转动的十字包结构,这样就实现了多自由度的效果。下面音叉结构的轴和轴套直接用滑动轴承,这样可以是结构更为紧凑。且具有自润滑效果。而上音叉的转动应用的单列圆锥滚子轴承,这样做的最大好处是可以承受较大的轴向力。从整体功能上来看该结构复合虎克铰有4 个转动副,完全满足六自由度平台对上虎克铰自由度的要求。另外,相对于球铰来说具有很好的耐磨性和易维护性。并且该结构的转角范围很大,进而可以大大提高整个平台的工作空间。下平台复合虎克铰的设计思路与此一致,在此不再赘述。
4 结论
针对6-3 型六自由度液压并联机器人提出了一种正运动学的解法,将位姿的求解转换成3 个虚拟角度的求解,再用数值方法解算。相对于6-6 的结构中需要求解6 个变量,计算量显著减少。然后通过对此并联机器人的工作空间进行了分析,验证了其足够大的工作空间。最后,对此型机器人进行了结构优化,设计了采用滑动轴承的复合虎克铰,有紧凑、简单,刚性大,转动范围大,容易加工等优点。
[1]STEWART D A.Platform with 6-DOF[C].Proc.On Institution of Mechanical Engineering,1965,180:371-386.
[2]黄真,孔令富,方跃法.并联机器人机构学理论及控制[M].北京:机械工业出版社,1997.
[3]王洪斌,魏立新,王洪瑞.并联机器人的理论研究现状[J].自动化博览,2002(5):42-45.
[4]赵慧,韩俊伟,张尚盈,等.六自由度并联机器人运动学分析和计算[J].机床与液压,2003(3):70-72.
[5]黄真,赵永生,赵铁石.高等空间机构学[M].北京:高等教育出版社,2006.
猜你喜欢
科教导刊·电子版(2022年36期)2022-02-18
中学生数理化·中考版(2021年10期)2021-11-22
中学生数理化·高一版(2021年11期)2021-09-05
小学生优秀作文(高年级)(2020年3期)2020-11-26
中国环境监察(2016年7期)2016-10-23
通信电源技术(2016年1期)2016-04-16
通信电源技术(2016年5期)2016-03-22
焊接(2016年2期)2016-02-27
哈尔滨师范大学自然科学学报(2015年6期)2015-04-23
大学物理实验(2014年6期)2014-12-24