公路长直线接小半径平曲线探究
2014-05-09 08:26张宝君
交通科技 2014年3期
张宝君 刘 军 金 灿
(中交第二航务工程勘察设计院有限公司 武汉 430071)
公路交通事故中,除人的因素外,设计线形组合不合理和指标采用不当,是导致事故发生的重要原因,特别是在事故多发路段,通常是因为设计缺陷所导致。陡下坡与长直线组合往往导致车辆超速,而现行《公路路线设计规范》(以下简称《规范》)[1]与1994年旧版《公路路线设计规范》一样,对长直线后不应接小半径平曲线,但未对小半径曲线做出定量要求。目前设计人员仅能通过大量工程实践和《公路项目安全性评价指南》[2]测算运行速度及其检验的方法,获得直线长度临界值及长直线后小半径平曲线的一般经验值。获得这些经验值需要大量的工程实践经验,且因项目的具体影响因素不同而千差万别。因此,本文希望通过分析公路长直线后接小半径易引起的安全隐患,找出其中主要的安全因素,控制其发生的几率,并总结出一般规律,提出量化指标。
1 长直线接小半径平曲线事故原因分析
1.1 长直线行驶视觉疲劳,导致超速
通常所说的“十祸九快”,形象地说明了超速行驶在交通事故中所占的比例,而长的直线路段易使驾驶员感到单调、疲乏、放松警惕,产生超速行驶,特别是在地形平坦路段和平纵面线形组合不利,以及路侧无护栏、树木、边坡等视线引导路段,对前方小半径平曲线,不能提前发现并采取适当操作。
1.2 入弯速度过高,超高不足引起侧滑
根据现行道路《规范》中对超高的计算公式(见式(1)),可以看出,超高的设置基于利用力学原理,以一定的内侧倾斜的坡度,抵抗向心力,弥补摩擦力不足以抵消的向心力部分。《规范》中对不同平曲线半径范围,规定了不同的超高值,以满足设计人员的执行操作,但如果因车辆入弯速度过快,超高与摩擦力不足以提供向心力时,车辆就会出现侧滑,高速行驶的车辆一旦出现侧滑、失控,后果不堪设想。ih=v852/(127×R)-μ (1)式中:ih为路拱横坡度,%;v85为运行速度计算值,k m/h;R为平曲线半径,m;μ为横向力系数。
1.3 入弯速度过快,导致转向不足和转向过度
转向不足俗称推头,表现为实际转向角小于转向轮转向角。转向过度俗称甩尾,表现为转向角大于转向轮转向角,见图1。转向不足与转向过度在高速行驶中导致司机转向误判,发生事故。转向过度与不足的计算是个复杂的计算过程,与道路状况、车辆动力系统配置、车辆结构、车辆重心、前后轴距、前后悬挂硬度、前后侧倾点等很多因素有关,本文不作重点探究。但对同一车辆而言,转弯时速度越高,由于轮胎与地面之间的侧滑和轮胎弹性侧向偏离影响,通常表现为:对于小型家用轿车重心靠前,转向不足;对于大型重载货车重心靠后,转向过度,这与一般驾驶人员的直观感觉相符[3-4]。
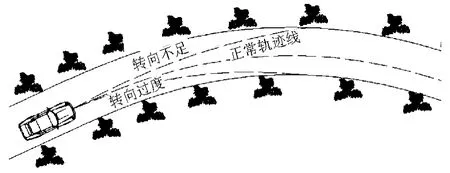
图1 转弯过度与不足示意图
经过长直线行驶,车辆速度提高,以较高速度驶入弯道时,方向盘转向角度的微弱变化,导致驾驶员瞬间不适应,车辆偏离正常行驶轨迹,极易导致车祸的发生。
2 长直线后道路曲线半径取值的探究
2.1 现行规范的不足
现行《规范》虽然要求避免长直线后接小半径平曲线,但小半径值并未量化规定,实践操作中难以把握,即使采用《公路项目安全性评价指南》对运行速度等进行安全评价,往往也是路线方案已基本确定后,此时路线线形再作调整,往往造成牵一发而动全身的后果,造成人力物力浪费。
2.2 长直线后曲线半径的分析
由式(1)可见,公路设计人员对超高值ih的取值通常根据《规范》1994版参考取值。这样采用的超高值,是基于车辆运行速度等于设计速度的基础上,但事实运行速度与设计速度相差较大时,上述超高值将不能满足需要。新颁布的《公路项目安全性评价指南》考虑到上述问题,提出超高计算值,采用运行速度v85即85%的车辆的实际运行速度。若已知运行速度v85和设计采用的超高值,则可以得到轮胎与路面的横向力系数μ值,另外根据国外研究成果作一定参考。
关于横向力系数μ:
小于0.10时,转弯不感到有曲线的存在,很平稳;
等于0.15时,转弯感到有曲线的存在,但尚平稳;
等于0.20时,已感到曲线的存在,并感到不平稳;
等于0.35时,感到曲线的存在,并感到不稳定;大于0.40时,转弯非常不稳定,有倾覆危险。根据国内《公路项目安全性评价指南》研究结论,平直路段道路期望速度V=120 k m/h,作为本次探究的运行速度代入式(1),试算现有旧设计规范和设计习惯采用的超高值,分别得出如下成果,见表1。
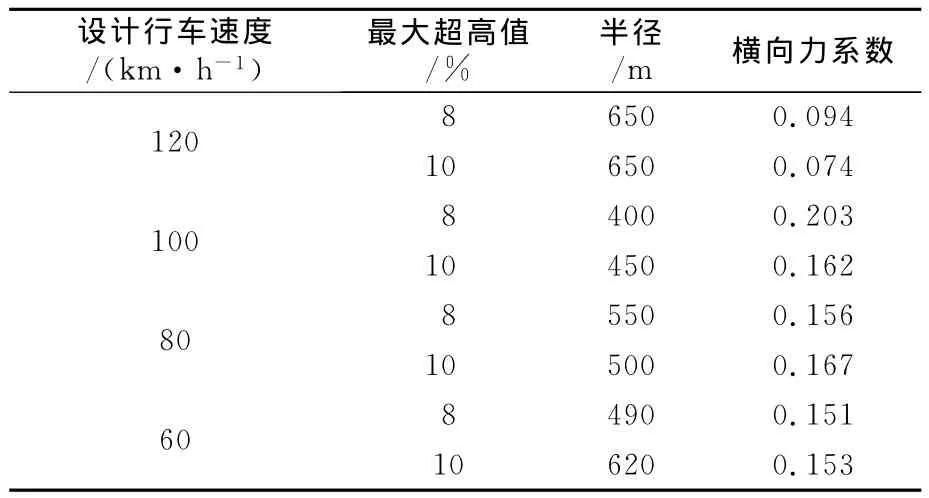
表1 横向力系数试算表
根据上述分析成果,取横向力系数μ=0.15,转弯感到有曲线的存在,但尚平稳作为评价指标,建议采用长直线后半径500~600 m作为临界半径。
国内部分其他研究认为,高速公路平曲线半径不宜小于600 m。
综合上述结论,以长直线后平曲线半径不小于600 m为宜。
2.3 国外相关规范的一般规定[5]
英国Mc Bean认为最小半径小于500 m时,事故率增加;澳大利亚Johns认为半径小于600 m时,产生较高的事故率;OECD建议极限半径为430;瑞典He Dman认为半径小于1 000和半径大于3 300事故率增加;而德国和日本研究证明,平曲线半径小于1 500 m时,曲线半径越小事故率越高,半径小于600 m时,事故率增加1.5倍,半径小于400 m时,事故率增加大约2倍。
根据美国规范规定,直线长度L<500 m时R=500 m,L≥500 m时R>L。
2.4 分析结论
根据以上国内外研究成果和本次分析,建议长直线后平曲线半径不宜小于600 m,同时根据人体感到单调、乏味所能忍受的时间,直线段长度也不宜大于设计行车速度的20 V行驶距离。
3 其他改善措施
上述分析过程中可以发现,超速行驶是影响安全问题的根源,因此控制行驶速度才是解决安全问题的关键。虽然超速行驶多为驾驶人员个人行为造成,但设计中必须尽可能减少诱使驾驶人员超速的因素,甚至是采取必要工程措施强制司机在某些危险路段减速行驶。新建道路建议采用以上研究成果控制长直线路段后的平曲线最小半径,已建的现有道路可通过如下措施改善。
(1)设置完善的安全标志、标线系统,为驾驶人员提供充足信息对前方路况做出预判,提前做出制动反映,平曲线附近存在学校、集市等人流较多路段可设置警示灯或强制减速带。
(2)改善曲线段通视距离,良好的视距有助于司机提前判断前方路况,英国规范中对此要求较严格,即不小于500 m,见图2。
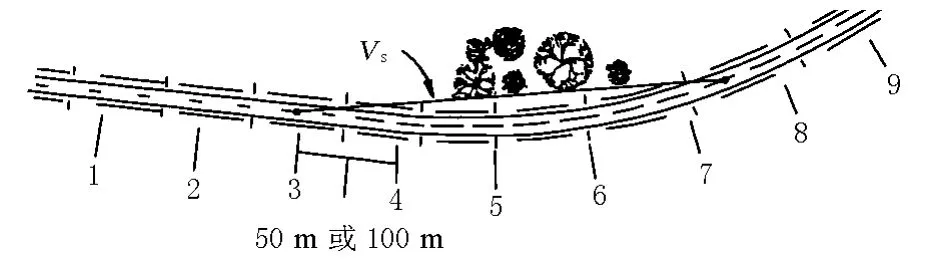
图2 曲线段视距示意图
(3)通过路侧护栏、植被绿化等措施增强道路诱导,增强司机对道路转向和距离的判断。
(4)改善路面结构,余量充沛地区宜采用开级配路面,增加路面抗滑能力,完善路侧排水设施,避免路面积水致车辆侧滑。
[1] JTG D20-2006公路路线设计规范[S].北京:人民交通出版社,2006.
[2] JTG/T B05-2004公路项目安全性评价指南[S].北京:人民交通出版社,2004.
[3] 余志生.汽车理论[M].北京:机械工业出版社,2009.
[4] 孟 刚.车辆的转向特征与阿卡曼转向原理的分析[M].机械研究与应用,2007(4):36-38.
[5] JTG/TD20-200X公路路线设计细则[S].北京:人民交通出版社,200 X.
猜你喜欢
工会博览(2022年5期)2022-06-30
昆钢科技(2021年2期)2021-07-22
中国交通信息化(2021年2期)2021-07-22
中外公路(2020年2期)2020-06-05
建材发展导向(2019年11期)2019-08-24
制造技术与机床(2019年6期)2019-06-25
华东师范大学学报(自然科学版)(2017年1期)2017-02-27
中国海上油气(2015年3期)2015-07-01
湖南安全与防灾(2014年12期)2014-02-27