
直升机旋翼/机身非定常气动干扰数值分析
2014-05-04 02:16:41谭剑锋王浩文
空气动力学学报 2014年3期
谭剑锋,王浩文
(清华大学 航天航空学院,北京 100084)
直升机旋翼/机身非定常气动干扰数值分析
谭剑锋,王浩文
(清华大学 航天航空学院,北京 100084)
基于非定常面元/时间步进全展自由尾迹建立了旋翼/机身非定常气动干扰分析方法。方法中耦合了非定常面元法和时间步进自由尾迹,以准确模拟旋翼非定常气动力、旋翼尾迹及桨叶对机身的非定常干扰效应。为模拟前飞状态下具有升力的机身,将机身离散为汇/偶极子面元,并采用涡线镜像法模拟旋翼尾迹靠近机身表面产生的加速效应。通过计算前飞状态的Maryland、ROBIN(Rotor Body INteraction)旋翼/机身干扰下的非定常压力分布,并与可得到的实验值、CFD计算结果对比,验证方法的准确性。随后分析前飞速度、旋翼与机身距离对旋翼/机身非定气动干扰的影响。计算结果表明机身头部和中部非定常压力主要受桨叶的通过性影响,而机身尾梁主要受尾迹/机身干扰影响,机身非定常气动力频率为桨叶片数的倍频。随前飞速度的增加,机身非定常压力幅值增加,尾梁压力幅值先增加后减小;增加旋翼与机身距离将减小机身和尾梁非定常压力幅值。
旋翼/机身干扰;非定常面元法;自由尾迹;非定常气动力;直升机
0 引言
旋翼流场由桨叶产生的旋涡主导,因而显得非常复杂。低速前飞状态下,机身浸润在旋翼尾迹中,桨叶脱出的桨尖涡将贴近机身表面移动,由此产生显著的旋翼/机身非定常气动干扰[1]。由于旋翼尾迹的复杂性和时变性,因此旋翼/机身气动干扰将影响机身表面压力分布,并产生显著的非定常气动载荷。此外,旋翼/机身非定常气动干扰也将改变桨叶气动环境,影响桨叶非定常气动载荷,并最终影响旋翼气动性能、操纵载荷及整机振动载荷,因此准确分析旋翼/机身非定常气动干扰显得非常重要。
随着CFD方法在旋翼流场分析中的成功应用,CFD方法已逐步应用于旋翼/机身非定常气动干扰分析[2-6]。基于求解Navier-Stokes方程,采用嵌套网格技术,CFD方法能准确模拟复杂的旋翼流场,但该方法在桨叶和机身附近需大量网格,且存在较大的数值耗散,因此消耗较多的计算时间和计算资源。通过将旋翼简化为作用盘,采用动量源方法可提高旋翼/机身气动干扰分析效率[7-10],但该方法不能很好模拟桨叶非定常特性对机身的干扰以及机身对桨叶非定常气动力的影响。
将旋翼尾迹简化成涡线,自由尾迹能快速模拟旋翼尾迹复杂的非定常特性,如桨尖涡涡对、涡环状态的相互缠绕等,是一种实用高效的分析方法[11-14]。通过汇面元模拟机身、并结合旋翼自由尾迹或预定尾迹可高效地分析旋翼/机身气动干扰[15-16],并在工程设计中得到广泛应用。但该方法采用二阶升力线模型(单根涡线)模拟桨叶气动力,因此难以准确计入复杂的桨叶三维效应、桨尖效应及桨叶/机身相互干扰效应。同时该方法采用汇面元模拟机身,而汇面元不能有效地模拟升力体,因此不能很好地模拟前飞状态下有升力的机身。为此,本文将通过汇/偶极子非定常面元模拟桨叶和机身的非定常气动特性,耦合旋翼时间步进自由尾迹和尾迹涡线镜像法以模拟旋翼尾迹靠近机身产生的尾迹/机身干扰效应,并由桨叶和机身面元的同步求解,建立基于非定常面元/全展自由尾迹的旋翼/机身非定常气动干扰分析方法。文中将计算前飞状态下的Maryland、ROBIN旋翼/机身气动干扰,并与实验测量值、CFD计算结果对比,验证本文方法的准确性。最后分析前飞速度、旋翼与机身距离对旋翼/机身非定常气动干扰的影响。
1 计算方法
1.1 桨叶/机身非定常面元
1.1.1 面元基本原理
除物面附近及尾流区外,旋翼流场可假设为无粘、无旋、不可压。在惯性坐标系下,连续方程可表示成速度势φ的函数[17],即

根据Green函数特性,式(1)的解可由物面和尾迹涡面上的一系列汇σ和偶极子μ组成,即
式中SB与SW分别为物面(桨叶或机身)和尾迹涡面,n为物面外法线单位矢量,r=(x,y,z)为空间点位置。
1.1.2 边界条件
物面边界条件要求相对于物面的法向速度为0,远场边界条件要求物体对流体的扰动在无限远处为0,即

采用Green函数,远场边界条件自动满足。
根据物面Neumann边界条件,物面边界SB的速度势增量为-σ,由此得到汇面元的强度。

假设物体表面由N个面元组成,尾迹涡面由Nw个面元组成,采用等强度四边形偶极子面元,则式(2)可表示成如下:

其中

对于等强度四边形面元,系数矩阵B、C可根据Hess&Smith[18]的解析面积分得到。
为确定桨叶面元分布,需采用后缘Kutta条件。定义桨叶后缘上、下表面面元偶极子强度为μu、μd,则后缘尾迹涡面偶极子强度μtw为:

则式(5)可表示成:

式中Ak为桨叶偶极子面元和尾迹偶极子面元的影响系数之和。
1.1.3 面元压力
旋翼流场确定之后,可根据非定常Bernoulli方程,通过速度势和物面速度计算压力分布。

无量纲压力可表示成如下:

式中v、p、pref、vref分别为当地流体速度、压力、参考压力、参考速度。非定常项∂φ/∂t可通过求解物体表面速度势得到。对于机身,非定项主要来源于桨叶和旋翼尾迹的影响。桨叶影响可通过速度势直接求解,而尾迹影响为尾迹对面元的诱导速度与尾迹自身速度之积[19]。

式中vind为尾迹对面元的诱导速度,vwake为尾迹自身速度。
1.2 时间步进自由尾迹
为求解桨叶和机身面元强度分布,在解式(5)或式(8)之前需计算旋翼尾迹。本文采用时间步进自由尾迹[12-14]。
时间步进自由尾迹基于不可压假设,并把旋翼尾迹漩涡简化为直线涡线。旋翼涡量场可由三维不可压粘性Navier-Stokes方程描述,表示成速度-涡量(u,ω)形式如下:

式中ν为运动粘性系数。在众多实际应用中,假设粘性项对旋翼流场的影响较小是合理的,因此尾迹涡线在旋翼流场中按当地速度自由移动,且强度保持不变,则式(12)可简化为:

式中r为涡线上任意一点的位置矢量,r0为涡线初始位置矢量,V为当地流场速度矢量。位置矢量r可表示为尾龄角ζ和桨叶方位角ψ的函数,由此式(13)可以表示成如下偏微分方程:

式(14)右端项为涡线的输运速度,包括自由来流、桨叶/机身面元的汇和偶极子、尾随涡偶极子面元、全展涡线的影响。

涡线的诱导速度由Biot-Savart定律求解。为避免距离r→0产生的数值奇异,文中采用Vatistas模型[20],涡线的涡核增长模型考虑了粘性效应[21],表示成如下:

式中rc0为起始涡核半径;αo为Osceen常数,大小为1.25643;δ为湍流粘性参数;Ω为旋翼转速。
采用有限差分近似时间和空间导数求解式(14)。涡线位置由时间步进格式求解得到。文中采用二阶精度的预估-修正格式(PC2B)[12-14]。
1.3 旋翼桨叶运动方程
旋翼尾迹和桨叶面元汇/偶极子分布与桨叶的挥舞运动方程紧密相连,因此在描述旋翼尾迹时需求解桨叶的挥舞运动。根据桨叶挥舞铰力矩为零建立刚性桨叶挥舞运动方程。桨叶挥舞运动可表示成一组常微分方程,并采用四阶Runge-Kutta求解[14]。
1.4 桨叶面元/尾迹耦合
为计算旋翼尾迹的畸变效应,采用全展涡线代替偶极子面元尾迹。旋翼桨叶由非定常面元构成,桨叶脱出的尾随涡由尾随偶极子面元构成,旋翼尾迹则由连接于尾随涡的全展涡线构成,并从桨叶尾随偶极子面元中脱出(如图1)。

图1 桨叶面元/尾迹耦合示意图Fig.1 Scheme of coupling blade panels with rotor wake
基于桨叶后缘Kutta条件及尾迹偶极子面元强度与涡线涡量强度等价原则,建立桨叶面元与尾迹之间的联系。偶极子面元与涡线等价原则可表示成如下[17]:

式中r为两点位置矢量;C表示尾迹面元边界线;Γ=μ为沿着面元边界C的涡线环量强度。
在各时间步,旋翼尾迹涡线强度由桨叶面元强度决定,同时桨叶面元的汇/偶极子强度又与旋翼尾迹涡线有关,由此确保桨叶非定常面元与旋翼尾迹的紧密耦合。
1.5 旋翼尾迹/机身干扰
低速前飞状态下,机身浸润在旋翼尾迹中,因此旋翼尾迹涡线将靠近机身表面。由于机身的阻塞效应,旋翼尾迹涡线靠近机身表面的速度减小,而切线速度增加,此时机身非定常压力主要来源于旋翼尾迹。由式(11)可知,非定常项由尾迹涡线移动速度和尾迹诱导速度构成,因此旋翼尾迹几何特性对旋翼尾迹/机身干扰影响显著。由于机身表面载荷与旋翼尾迹几何密切相关,因此旋翼尾迹涡线靠近机身表面的运动特性就显得非常重要[22]。为满足机身表面无穿透条件,并模拟涡线靠近机身表面的加速现象,文中采用涡线镜面法。与二维点涡镜面类似[22],尾迹涡线由两点直线构成,因此可通过涡线中点的矢量镜面得到镜像涡线,镜像涡线涡量为Γ′=-Γ(如图2)。

图2 涡线物面镜面Fig.2 Mirror vortex line of body surface
在各时间步,通过桨叶和机身非定常面元同步求解,得到桨叶和机身的非定常气动力,而后推进旋翼尾迹,由此计算旋翼/机身非定常气动干扰。
2 计算结果与分析
为验证本文旋翼/机身非定常气动干扰分析方法的准确性,文中将计算前飞状态的Maryland、ROBIN旋翼/机身干扰下的机身非定常压力分布,并与可得到的实验值、CFD计算结果对比验证。随后分析前飞速度、旋翼与机身高度对非定常气动干扰的影响。
2.1 Maryland旋翼/机身干扰
本算例为前飞状态下的Maryland旋翼/机身干扰试验[23],旋翼系统由4片直径为1.65m的矩形桨叶铰接构成,桨叶线性负扭为-12°,翼型为NASA RC310和RC410,弦长为0.0635m,旋翼转速为1860rpm,机身长度为1.94m,机身最大截面直径为0.254m,机身尾梁与机身截面直径之比为1∶2.5。桨毂中心与机身重心高度为0.24m。机身压力传感器分布如图3。
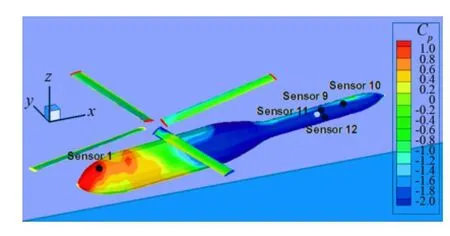
图3 Maryland机身压力传感器和压力分布Fig.3 Sensors locations and pressure distribution of Maryland fuselage
旋翼/机身干扰下的各传感器非定压力随桨叶方位角变化历程如图4。
从图4中可以看出,本文计算方法计算得到Maryland旋翼/机身干扰下的非定常压力时间变化历程与实验测量值吻合较好。
图4中各传感器非定常压力随方位角的变化均表现为4Ω周期波动,此倍频与旋翼桨叶片数相同,由此说明桨叶通过机身上方所产生的显著非定常干扰效应。机身头部(传感器1)非定常压力呈现出类正弦波动,主要原因为传感器1在旋翼下方,受桨叶通过性影响显著。传感器9、10在旋翼下方之外的尾梁,受到桨叶通过性影响减小,而主要受到旋翼尾迹与尾梁干扰影响,因此非定常压力呈现锯齿形状。传感器9比传感器10更靠近旋翼,因此传感器9的非定常压力受到桨叶通过性影响更显著,表现的类正弦特性更显著。传感器11、12在尾梁左右两侧,主要受到旋翼尾迹/机身干扰影响,表现出锯齿形状。
从图4(b)、(c)中可以看出,传感器9的压力峰值相位超前于传感器10,主要原因为尾梁传感器9比传感器10更靠前,旋翼尾迹将先靠近传感器9。但随着诱导速度的向下作用,尾迹距传感器10的距离更小,因此负压峰值更大,旋翼尾迹/尾梁干扰更显著。
从图4(d)、(e)中可以看出,尾梁左侧传感12的非定常负压峰值大于尾梁右侧传感器11,主要原因为旋翼右旋,旋翼尾迹贴近尾梁的左侧,因此对传感器12的干扰作用大于右侧的传感器11。
2.2 ROBIN旋翼/机身干扰
本算例为前飞状态下的ROBIN旋翼机身干扰试验[24]。旋翼系统为2MRTS(2-Meter Rotor Test System)缩比旋翼[25],机身为流线型机身。
2MRTS旋翼由4片矩形桨叶铰接构成,桨叶半径为0.861m,弦长为0.0663m,线性负扭为-8.0°,翼型为NACA0012翼型,旋翼转速为2000r/min,前进比为μ=0.151。机身长度为1.999m,桨毂与机身重心垂直距离为0.322m,旋翼周期变距由风洞试验数据得到[25]。各片桨叶由弦向60段和展向20段面元组成,旋翼系统共由4800个面元构成,ROBIN机身由10842个面元组成。机身头部、发动机舱、尾梁、机身左右两侧压力传感器分布如图5所示。

图4 Maryland机身各传感器非定常压力变化历程Fig.4 Unsteady pressure history of sensors on Maryland fuselage

图5 ROBIN机身压力传感器分布Fig.5 Locations of pressure sensor on the ROBIN fuselage
ROBIN旋翼/机身干扰下的旋翼尾迹如图6所示,从图中可以看出,旋翼左右两边形成比较明显的桨尖涡。由于机身的排斥作用,旋翼中间尾迹向上、左右两侧移动,但尾梁后段仍然浸入在旋翼尾迹中,因此将产生显著的旋翼/机身干扰。桨叶/机身压力分布如图7所示,机身头部和发动机舱前、后缘部分产生较大压力。前飞状态下,由于旋翼前行边和后行边桨叶相对来流的非对称,因此需通过周期变距改变桨叶的桨距以保证整机左右平衡,并由此导致前行边和后行边桨叶气动环境、桨叶脱出涡量不一致,从而引起旋翼尾迹的非对称。由于旋翼尾迹非对称和桨叶位置的变化,导致机身前后、左右两侧压强非对称,由此产生时变载荷。
ROBIN机头顶部、发动机顶部、尾梁顶部、机身两侧非定常压力随桨叶方位角变化如图8。
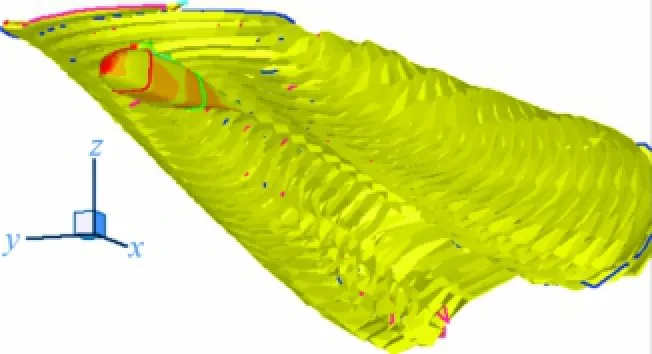
图6 ROBIN旋翼/机身干扰尾迹Fig.6 Rotor wake for ROBIN rotor/fuselage interaction
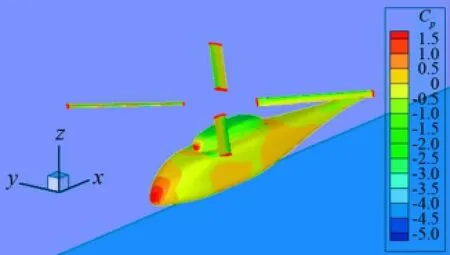
图7 ROBIN旋翼/机身压力分布Fig.7 Pressure distribution of ROBIN fuselage

图8 ROBIN机身各传感器非定常压力变化历程Fig.8 Unsteady pressure history of sensors on ROBIN fuselage
从图8中可以看出,本文计算方法计算得到ROBIN旋翼/机身干扰下的各传感器非定常压力时间变化历程与实验值[24]和CFD计算结果[4,26]比较吻合,由此验证本文计算方法的可靠性。
由于旋翼系统采用4片桨叶,因此图8中各传感器非定常压力随方位角变化历程均呈现4Ω的周期特性。从图5可以看出,各传感器均位于旋翼下方,因此各传感器非定常压力主要表现为桨叶通过性影响。
为反映机身各处压力的变化特性,机身各传感器非定常压力峰值相位和幅值如表1。

表1 非定常压力幅值和相位Table 1 Amplitude and phase of unsteady pressure of sensors
从表1可以看出,机身头部传感器6非定常压力峰值出现在桨叶通过机身后,而发动机舱传感器22和尾梁顶部传感器15非定常压力峰值出现在桨叶未通过机身前,主要原因为机身头部距离桨尖平面距离更大,阻塞效应较小,且存在阻塞滞后,并由此导致机身头部非定压力幅值小于尾梁顶部。由于传感器22处于桨根下方(图5),因此受桨叶通过性的影响小于传感器15。由于桨叶右旋转,导致机身左侧流场阻塞,机身右侧流场扩展,由此导致左侧传感器13的压力幅值大于右侧传感器19,且右侧峰值相位滞后与左侧。由于机身头部、尾梁、机身左、右侧非定常压力幅值与相位的差异导致机身力与力矩的非对称,由此产生4Ω周期激励载荷。
2.3 前飞速度对旋翼/机身干扰影响
以ROBIN旋翼/机身干扰为基本算例,分析前飞速度对机身非定常压力的影响。
从图9中可以看出,随着前飞速度的增加,旋翼载荷增加,桨叶通过性对机身非定常压力影响增加,由此导致机身头部、发动机舱、机身右侧压力幅值均增加,且随着前飞速度增加,压力幅值增加速率增加。但尾梁传感器15压力幅值随前飞速度的增加而先增加后减小,原因为前飞速度较小时,尾迹/尾梁干扰显著,速度增加导致尾迹对尾梁的诱导非定常项影响增加,因此压力幅值增加,但随前飞速度的继续增加,尾迹距尾梁的距离增加,因此对尾梁的影响减小。机身与发动舱连接处传感器19的压力幅值随前飞速度增加而减小,原因为传感器在前行桨叶下方,前飞速度增加,为满足配平条件,需减小前行桨叶桨距,前行桨叶桨根载荷减小,因此旋翼桨叶通过性影响减小。
2.4 旋翼与机身距离对旋翼/机身干扰影响
以ROBIN旋翼在前进比为0.15状态下为基本算例,旋翼与机身高度分别增加5%、10%、15%、20%、30%后机身各部分压力幅值的变化如下。
从图11中可以看出,随着旋翼与机身距离的增加,桨叶通过性对机身非定常压力影响减弱,由此导致机身头部、尾梁顶部、机身左右侧各处压力幅值均减小。随着旋翼与机身距离的增加,压力幅值减小速率逐渐减小,距离增加20%,传感器幅值减小为参考值的80%以下。但发动机舱顶部传感器幅值随旋翼与机身距离的增加而先减小后增加,主要原因为旋翼与机身距离的增加,桨叶通过性影响减小,因此压力幅值先减小;旋翼与机身距离的继续增加,方位角为270°处桨叶的桨尖涡将贴近发动机舱顶部,由此导致压力幅值增加。

图10 旋翼与机身距离示意图Fig.10 The distance between rotor and fuselage

图11 旋翼与机身距离对非定常压力幅值的影响Fig.11 The influence of distance between rotor and fuselage on amplitude of unsteady pressure
3 结论
(1)本文基于非定常面元/全展自由尾迹建立了旋翼/机身非定常气动干扰分析方法,计算得到Maryland、ROBIN旋翼/机身干扰下的非定常压力时间历程与实验测量值和CFD计算结果均吻合较好,验证了本文方法的准确性。
(2)在旋翼/机身干扰下,机身各处非定常压力呈现出桨叶片数倍频的周期波动。由于旋翼旋转方向、机身阻塞效应及尾迹干扰等影响,机身前后、左右压力幅值和相位存在差异,由此产生周期的气动载荷。
(3)在旋翼/机身干扰下,旋翼下方的机身头部、中部及尾梁前部的非定常压力主要受桨叶通过性影响,而尾梁后部非定常压力主要受到旋翼尾迹/机身干扰影响。
(4)随前飞速度的增加,旋翼载荷和尾迹强度的增加,桨叶通过性影响增强,导致机身大部分非定常压力幅值增加;由旋翼尾迹移动速度增加,导致尾梁非定常压力幅值随前飞速度先增加后减小。
(5)旋翼与机身距离增加,机身受桨叶通过性影响减弱,机身和尾梁非定常压力幅值减小。
[1]HWA J N,YOUNG M P,KWON O J.Simulation of unsteady rotor-fuselage aerodynamic interaction using unstructured adaptive meshes[J].Journal of AHS,2006,51(2):141-149.
[2]MARKUS D,MANUEL K,EWALD K,et al.Tip vortex conservation on a helicopter main rotor using vortex-adapted chimera grids[J].AIAA Journal,2007,45(8):2062-2074.
[3]JIANG X,CHEN Z B,ZH ANG Y L.Numerical simulation of a hovering rotor flowfield using a dual-time method[J].ACTA Aerod ynamica Sinica,1998,16(3):288-296.(in Chinese)
江雄,陈作斌,张玉伦.用双时间法数值模拟悬停旋翼流场[J].空气动力学学报,1998,16(3):288-296.
[4]STEIJL R,BARAKOS G N.Computational study of helicopter rotor-fuselage aerodynamic interatctions[J].AIAA Journal,2009,47(9):2143-2157.
[5]YE L,ZHAO Q J,XU G H.Numerical simulation of flowfield of helicopter rotor and fuselage in forward flight based on unstructured embedded grid technique[J].Journal of Aerospace Power,2009,24(4):903-910.(in Chinese)
叶靓,招启军,徐国华.非结构嵌套网格的直升机旋翼/机身前飞流场数值模拟[J].航空动力学报,2009,24(4):903-910.
[6]XU H Y,YE Z Y,WANG G,et al.Numerical simulation of unsteady rotor-fuselage aerodynamic interaction[J].ACTA Aerod ynamica Sinica,2010,28(6):162-167.(in Chinese)
许和勇,叶正寅,王刚,等.旋翼/机身干扰非定常流场数值模拟[J].空气动力学学报,2010,28(6):162-167.
[7]DAVID M O,SMITH M J.Analysis of rotor-fuselage interactions using various rotor models[A].43rd AIAA Aerospace Sciences Meeting and Exhibit[C].Reno,Nevada:AIAA,2005.
[8]SCHAFFAR M,H AERTIG J,GNEMMI P.Computation of the BVI noise for the A H-1/OLS model rotor in forward flight with taking into account the fuselage[A].15th AIAA Aeroacoustics Conference[C].Long Beach,CA:AIAA,1993.
[9]WANG B,ZHAO Q J,XU G H.Numerical simulations for the flowfield of helicopter rotor/fuselage based upon momentumsource method[J].Helicopter Technique,2008,3:24-30.(in Chinese)
王博,招启军,徐国华.基于动量源方法的直升机旋翼/机身流场数值模拟[J].直升机技术,2008,3:24-30.
[10]HU L,CAO Y H,ZHAO M.Numerical simulation of helicopter rotor-fuselage-engine aerodynamic interactions[J].Journal of Aerospace Power,2008,23(10):1883-1887.(in Chinese)
胡利,曹义华,赵明.直升机旋翼机身发动机耦合流场数值模拟[J].航空动力学报,2008,23(10):1883-1887.
[11]BAGAI A,LEISHMAN J G.Rotorfree-wake modeling using a pseudo-implicit algorithm[J].Journal of Aircraft,1995,32(6):1276-1285.
[12]BHAGWAT M J,LEISHMAN J G.Stability consistency and convergence of time-marching free-vortex rotor wake algorithms[J].Journal of the American Helicopter Society,2001,46(1):59-71.
[13]LI C H,XU G H.The rotor free-wake analytical method for tiltrotor aircraft in hover and forward flight[J].ACTA Aerodynamica sinica,2005,23(2):152-156.(in Chinese)
李春华,徐国华.悬停和前飞状态倾转旋翼机的旋翼自由尾迹计算方法[J].空气动力学学报,2005,23(2):152-156.
[14]TAN J F,WANG H W,LIN C L.Analysis of rotor parameters on rotor hover performance by lifting-surface and free wake method[J].ACTA Aeronautica et Astronautica Sinica,2012,33(2):249-257.(in Chinese)
谭剑锋,王浩文,林长亮.基于升力面自由尾迹的直升机旋翼悬停性能参数影响研究[J].航空学报,2012,33(2):249-257.
[15]ZHAO J G,XU G H,WANG S C.Analysis of unsteady aerodynamic interactions between rotor and fuselage of helicopters in forward flight[J].Ex periments and Measurements in Fluid Mechanics,2000,14(3):18-24.(in Chinese)
赵景根,徐国华,王适存.前飞状态直升机旋翼/机身非定常气动干扰的分析[J].流体力学实验与测量,2000,14(3):18-24.
[16]XU G H,ZHAO Q J,GAO Z,et al.Prediction of aerodynamic interactions of helicopter rotor in its fuselage[J].Chinese Journal of Aeronautics,2002,15(1):12-17.
[17]MORINO L.Boundary integral equations in aerodynamics[J].Applied Mechanics Reviews,1993,46(8):445-466.
[18]HESS J,SMITH A M O.Calculation of non-lifting potential flow about arbitrary three-dimensional bodies[J].Journal of Ship Research,1964,8(2):22-44.
[19]LORBER P F,EGOLF T A.An unsteady helicopter rotor-fuselage aerodynamic interaction analysis[J].Journal of AHS,1990,35(1):32-42.
[20]VATISTAS G H,KOZEL V,MIH W C.A simpler model for concentrated vortices[J].Ex periments in Fluids,1991,11:73-76.
[21]BHAGWAT M J,LEISHMAN J G.Generalized viscous vortex model for application to free-vortex wake and aeroacoustic calculations[A].The 58th Annual Forum and Technology Display of the American Helicopter Society International[C].2002:11-13.
[22]CROUSE G L,LEISHMAN J G,NAIPEI B.Theoretical and experimental study of unsteady rotor/body aerodynamic interactions[J].Journal of AHS,1992,37(1):55-65.
[23]NAI P B,LEISH MAN J G.Experimental study of rotor/body aerodynamic interactions[J].Journal of Aircraft,1990,27(9):779-788.
[24]RAYMOND E M,SUSAN A G.Steady and periodic pressure measurements on a generic helicopter fuselage model in the presence of a rotor[R].NASA TM 2000-210286,2000.
[25]ARTHUR E P,BERRY D B.Description of the U.S.Army smallscale 2-meter rotor test system[R].NASA TM 87762.1987.
[26]PARK Y,KWON O.Simulation of unsteady rotor flow field using unstructured adaptive sliding meshes[J].Journal of A HS,2004,49(4):391-400.
Numerical analysis of helicopter rotor/fuselage unsteady aerodynamic interaction
TAN Jianfeng,WANG Haowen
(School of Aerospace,Tsinghua University,Beijing 100084,China)
Unsteady aerodynamic load on helicopter fuselage is mainly due to aerodynamic interaction of rotor and fuselage.An unsteady panel/time-step full-span free-wake method is established to accurately predict the rotor/fuselage unsteady aerodynamic interaction for the vibration load analysis of whole vehicle.The unsteady panel method is used to consider unsteady aerodynamics of rotors and fuselage,and the free-wake method is applied to accurately simulate dynamics of rotor wake.Helicopter fuselage is discretizated into source/doublet panels to simulate its lift in forward flight,and vortex line mirror method is adapted to account acceleration phenomenon resulted from rotor wake close to fuselage surface.To validate the accuracy of this approach,unsteady rotor/fuselage aerodynamic interaction of Maryland and ROBIN modes are simulated in forward flight,and compared with measured data and CFD results.Finally,the influences of advanced ratio,rotor-fuselage distance on unsteady aerodynamic interaction are analyzed.It is shown that the unsteady pressure of fuselage is mainly affected by rotor blade pass effect,while that of tail boom is mainly due to the interaction of rotor wake and fuselage,and the frequency of unsteady pressure is times of blades number.Amplitude of unsteady pressure on fuselage will increase as advance ratio increases,that of tail boom,however,will increase and then decrease.Increasing rotor-fuselage distance will decrease amplitude of unsteady pressure on fuselage and tail boom.
rotor/fuselage interaction;unsteady panel method;free-wake;unsteady aerodynamics;helicopter
V211.52
Adoi:10.7638/kqdlxxb-2012.0141
0258-1825(2014)03-0320-08
2012-09-05;
2012-11-11
谭剑锋(1984-),男,博士研究生,主要研究方向:旋翼动力学和总体设计.E-mail:windtam2003@gmail.com
王浩文,男,博士,教授、博导,主要研究方向:旋翼动力学、结构强度及振动载荷分析.E-mail:bobwang@mail.tsinghua.edu.cn
谭剑锋,王浩文.直升机旋翼/机身非定常气动干扰数值分析[J].空气动力学学报,2014,32(3):320-327.
10.7638/kqdlxxb-2012.0141.TAN J F,WANG H W.Numerical analysis of helicopter rotor/fuselage unsteady aerodynamic interaction[J].ACTA Aerodynamica Sinica,2014,32(3):320-327.
猜你喜欢
辽宁师范大学学报(自然科学版)(2022年4期)2022-12-27 12:27:28
电子设计工程(2022年12期)2022-06-29 06:08:20
煤(2021年9期)2021-09-15 05:31:06
机械管理开发(2021年1期)2021-04-08 12:25:34
北京航空航天大学学报(2017年2期)2017-11-24 05:24:53
装备学院学报(2016年5期)2016-11-14 06:26:42
采矿与岩层控制工程学报(2015年3期)2015-12-16 19:20:44
海军航空大学学报(2015年1期)2015-11-11 17:18:24
化工管理(2014年14期)2014-08-15 00:51:32
雷达学报(2012年4期)2012-10-03 12:25:02
