
非零侧滑角大迎角细长体侧向力控制规律实验研究
2014-04-06 12:49周欲晓顾蕴松
空气动力学学报 2014年3期
周欲晓,顾蕴松
(1.南京航空航天大学 无人机研究院,南京 210016;2.南京航空航天大学 航空宇航学院,南京 210016)
0 引 言
现代高性能战斗机在进行大迎角飞行时,其细长前体的非对称尾涡往往会导致“魔鬼侧滑”运动的发生。在这种情况下,由于战斗机的垂尾、平尾和控制舵面处于机身的湍流尾流中,不能提供有效克服侧滑的侧向力和偏航力矩。因此飞行器一旦发生侧滑运动,就会迅速进入如锥形运动、摇滚振荡、尾旋和落叶等复杂飞行运动状态,并且极难从这些复杂飞行状态中改出,从而丧失了安全飞行的控制能力。近年来,国外有多起战斗机大迎角飞行时发生安全事故的报道。在发生侧滑情况下,高机动飞行器自身的“纠偏能力”是大迎角安全飞行的关键技术之一。
多年来大迎角细长体的非对称涡/流动控制技术研究得到了充分的重视。NG T T等通过吹/吸气涡控制技术[1-5]消除和减弱大迎角细长旋成体背风区流动的非对称性。邓学蓥、王延奎、曹义华[6-9]通过固定微三角块等人工扰动和背风侧单孔微吹气组合扰动主动控制技术,对大迎角非对称背涡流场进行主动控制。孟宣市[10]在圆锥头尖处迎风面两侧对称放置一对等离子体激励器,实现对细长旋成体侧向力和力矩的控制。王健磊[11]通过控制等离子体激励器的开闭使得圆锥-圆柱组合体在大迎角下出现的侧力改变方向。顾蕴松、明晓[12-17]通过在细长旋成体头部施加非定常弱扰动来控制头部非对称背涡,从而控制侧向力的方向和大小。Franklin C Wong等[18]的风洞实验研究表明安装在头部的形状记忆合金微激励器(SMA-actuated micro-flow effector)通过改变涡结构来控制侧向力。
上述大迎角非对称涡的主动控制技术在零度侧滑角时,非对称流动和侧向力的控制都取得了较好的效果[2-10]。而在实际飞行中,即使以零侧滑角拉起,飞行器在大迎角下状态非对称涡流也会迅速引起侧滑,常规非对称流动控制技术往往还没有来得及产生控制效果。这就要求前体非对称流动主动控制技术除了消除和控制大迎角零侧滑时产生的侧向力和力矩,也要有能力在已发生侧滑时具备可控侧向力和偏航力矩来进行“纠偏”。如何在大迎角有侧滑情况下使飞行器仍具有高机动飞行的姿态控制能力是飞行器飞行控制急需解决的问题。
本文主要目的是通过研究大迎角非零侧滑情况下的主动流动控制技术,研制一种可以对侧向力和偏航力矩进行比例控制的控制方法,不仅可以控制侧向力的方向,也可以连续改变侧向力的大小。这种控制方法所需要能量非常小,不影响飞行器正常飞行性能,利用可控侧向力提供的偏航力矩,为增强飞行器在大迎角飞行时的安全性和机动性提供了一种技术可行的控制方法。
1 实验设备
大迎角细长旋成体前体非对称流动控制试验在南京航空航天大学空气动力学系非定常回流低速风洞进行。开口实验段为矩形1.5m×1.0m,实验段长度1.7m,最大风速40m/s,最低稳定风速为0.5m/s,湍流度为0.08%。
模型长度为700mm,头部为尖拱型的锥柱体长细比为2,后段为圆柱体,长细比为9.3,模型采用硬铝材料加工。模型内部装有Φ24尾撑杆式六分量测力天平,通过弯刀支架安装在圆盘转台上。六分量天平在中国空气动力研究和发展中心高速所,采用“单元体轴校”法进行了校准。天平静校精度为2‰,极限误差为6‰。转台由步进电机驱动可做360°水平旋转,用来改变模型的迎角,其控制精度优于2′。在80°迎角时,模型和支架在风洞中的阻塞度小于3%。实验装置可同时开展气动力和空间流场定量测试实验(图1)。在模型头部尖顶处装有条形的微扰动片,并与从模型内部伸出的旋摆机构输出轴相连。微扰动片厚度为0.2mm,长度和高度分别为3mm、1.8mm。扰动片可固定在头尖部不同的周向角Φ,也可由旋摆机构带动进行旋摆振动来提供非定常小扰动来进行前体非对称涡流动控制(见图2),并且可以改变微扰动片摆振的平衡位置角ΦS。

图1 细长旋成体模型低速风洞测力示意图Fig.1 The test setup of slender body forces measurement in low speed wind tunnel

图2 细长旋成体模型头尖部非定常微扰动摆振片示意图Fig.2 The fast-swing micro tip-strake on the nose tip of slender body
在进行模型大迎角试验前,先用低速标模进行了七次重复性试验。试验结果表明重复性精度升力单元为0.002,阻力单元为0.0004,侧向力单元为0.001,偏航力矩单元为0.0004,满足低速风洞测力试验精度国家军用标准GJB1061-91合格指标要求。
2 大迎角细长旋成体变侧滑角时模型侧向力变化规律
2.1 模型侧向力与固定微扰动片周向角之间的变化规律(迎角α为55°)
如图3所示,模型侧向力随固定微扰动片在模型头部周向位置角的改变呈反“Z”字型变化特点。在模型头部周向位置角Φ=0°位置附近,只要微小的周向角度偏移量,模型的侧向力就从负极值跳转到正极值。改变固定微扰动片Φ角只能控制侧向力的方向,而不能连续比例控制侧向力的大小。

图3 模型侧向力随微扰动片在模型头部周向位置角的变化规律(α=55°,ReD=55000)Fig.3 The side forces of slender body changing with azimuthal angle of the fixed micro tip-strake(α=55°,ReD=55000)
根据前期流场测试结果,总结出流动拓扑结构见图4,详细结果可以参见文献[7]。零侧滑时,细长体背风区有两种稳定状态的非对称涡系结构,以模型中心对称面为镜像对称。这又称为前体非对称流动的“双稳态”流动现象。其中“正稳态”和“负稳态”分别对应为模型侧向力的正负极值。改变头部固定微扰动片周向角位置,即可以控制调控前体背风区流动从“正稳态”到“负稳态”的迅速切换,反之亦然。可以看出细长体背风区的非对称流动/侧向力强烈依赖于头部微扰动片的周向位置角,或者说是小扰动的施加方式。
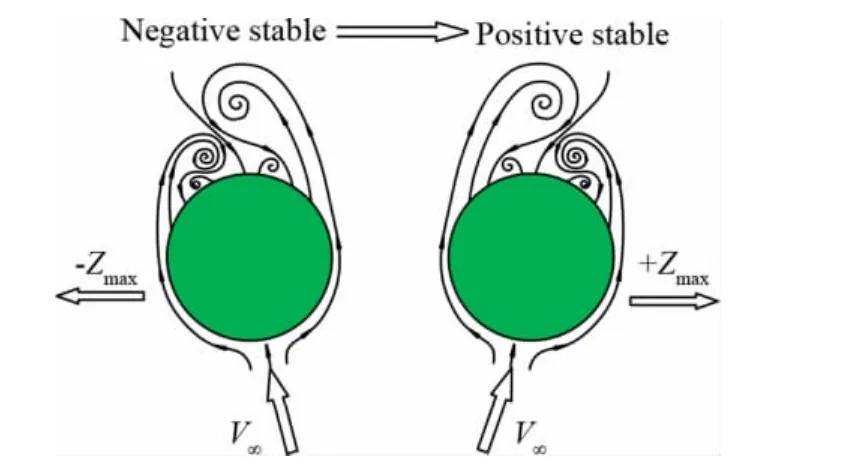
图4 双稳态非对称背涡流态切换示意图(模型后方观察)Fig.4 The switching flow pattern map of bi-stable asymmetric leeward vortices(view from the leeward of model)
2.2 微扰动片固定时,模型侧向力和偏航力矩与侧滑角之间的变化规律(迎角α为55°)
受模型角度机构的限制,模型侧滑角的变化范围为β=-28°~+8°。在模型头部无控制(strake off)和采用固定微扰动片控制时,模型所受侧向力与侧滑角之间的变化规律如图5所示。

图5 微扰动片固定控制时模型侧滑角与侧向力之间的变化规律(α=55°,ReD=55000)Fig.5 The side forces of slender body changing with sideslip angles with control of fixed micro tip-strake
模型头部无微扰动片及微扰动片固定在模型头部迎风面右侧(周向角Φ 为20°),侧滑角从+8°到-20°变化时,侧向力曲线呈现线性递增的变化规律;当侧滑角β小于-20°后,侧向力增加趋势减缓。这反映了零侧滑时正、负稳态的非对称涡结构,在有侧滑流动情况下侧向力变化趋势(见图5)。微扰动片固定且Φ=0°时:1)β>0°时侧向力的变化规律与模型头部无微扰动片时相同(负稳态);2)β<0°时侧向力的变化规律与微扰动片模型固定在头部右侧周向角Φ=20°相同(正稳态);3)在β=0°附近,流动状态从右侧滑向左侧滑变化时,非对称涡结构从负稳态跳转到正稳态。
图6给出了固定微扰动片Φ=0°时模型侧滑角与偏航力矩之间的变化规律。
模型头部无微扰动片与微扰动片模型固定在头部右侧周向角Φ=20°时,两种情况的偏航力矩相对于侧滑角的变化曲线基本上关于x轴对称,并且在β=-20°~8°范围内偏航力矩的变化量很小。这是由于改变侧滑角时,虽然侧向力有较大的变化,但压力中心的位置非常接近模型的测力参考点;并且随侧滑角改变,压心在测力参考点附近移动。侧向力增大时,压心向模型测力参考点靠近;侧向力减小时压心远离模型测力参考点。β<-20°后,两种情况的偏航力矩绝对值逐渐降低。微扰动片固定在模型头部迎风面中心对称面上Φ=0°改变侧滑角时,偏航力矩曲线在β=0°附近发生跳转。这时非对称背涡从一种稳态(侧向力为负值)跳转到另一种稳定的非对称流动状态(侧向力为正值),见图4。
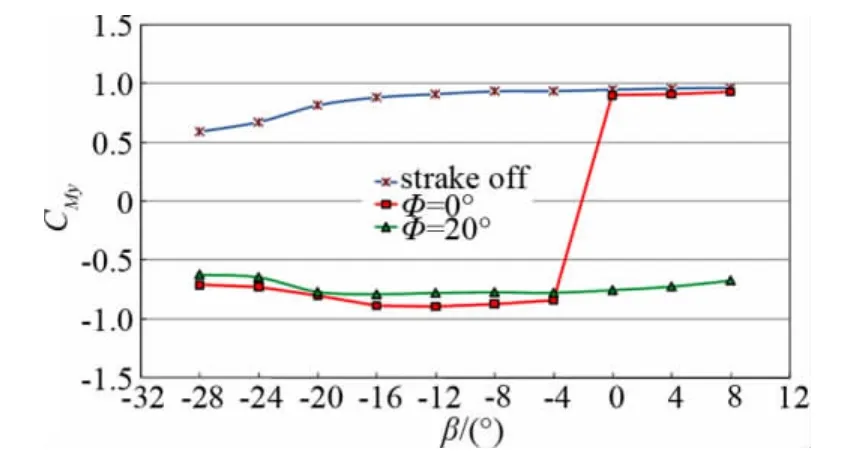
图6 固定微扰动片控制时模型侧滑角与偏航力矩之间的变化规律(α=55°,ReD=55000)Fig.6 The yawing moments of slender body changing with sideslip angles with control of the fixed micro tip-strake(α=55°,ReD=55000)
对于横截面为圆形的细长旋成体来说,改变模型的侧滑角实际上是改变了模型迎风面的驻点位置,即改变了微扰动片的有效周向角位置Φs(ef)[7]。在迎角为55°时改变侧滑角:1)模型头部无控制微扰动片,则改变了模型有效的迎角;2)有控制微扰动片,则同时改变了模型有效的迎角和微扰动片的有效周向位置角。
由此可见,改变侧滑角对微扰动片的周向位置角影响较大。参见图3的实验结果,也就可以理解图5和图6中在β=0°附近模型侧向力和偏航力矩发生跳转,以及β<0°则侧向力大于零、偏航力矩小于零;β>0°则侧向力小于零、偏航力矩大于零的原因。
2.3 微扰动片摆振控制时,模型侧向力和偏航力矩与侧滑角之间的变化规律(迎角α为55°)
固定微扰动片在模型迎风中心对称面(Φ=0°)位置,改变侧滑角与改变模型滚转角类似,即模型的侧向力在两种稳态之间发生突跳变化(参见图3)。采用微扰动片摆振主动控制后,模型的侧向力可以得到较好的线性比例控制规律(图7)。
图8给出了采用微扰动片摆振控制后,微扰动片摆振的平衡位置角Φs=-10°和Φs=10°时改变侧滑角模型侧向力的变化规律。在迎角为55°、Φs=-10°、侧滑角β=-24°~4°时,对应的有效周向角位置Φs(ef)=-16°~+16°(计算方法参见文献[7]),在此范围内侧向力系数随微扰动片摆振平衡位置周向角的变化呈线性变化规律。当Φs(ef)的绝对值大于16°后,即β=-28°和β=+8°时侧向力为“正”、“负”稳态的极值。Φs=10°时,在侧滑角β=-5°达到“正”稳态的侧向力变化曲线,此时对应的Φs(ef)约为+16°。在β=-4°~8°范围内,侧向力系数随微扰动片摆振平衡位置周向角的变化呈线性变化规律,曲线在β=6°附近与X轴相交表明侧向力为零。Φs=-10°、0°、10°三种情况的侧向力变化曲线的线性段近似平行。

图7 摆动微扰动片控制情况下模型侧向力相对Φs(ef)的变化规律(α=55°,ReD=55000)Fig.7 The controlling law of lateral force with changing Φs(ef)angle of the swinging micro-tip-strake(α=55°,ReD=55000)

图8 改变微扰动片摆振平衡位置侧向力与侧滑角之间的变化规律(α=55°,ReD=55000)Fig.8 The controlling law between side forces with sideslip angle while changing equilibrium position of micro-tip-strake(α=55°,ReD=55000)
图9给出了采用微扰动片摆振控制后,微扰动片摆振平衡位置在Φs=-10°和Φs=10°时改变侧滑角模型偏航力矩的变化规律。同图8中侧向力的变化规律类似,Φs=-10°时,侧滑角β=-24°~4°时偏航力矩系数随微扰动片摆振平衡位置周向角的变化呈线性变化规律。Φs=10°时,在侧滑角β=-4°达到“正”稳态的偏航力矩变化曲线,β<-4°后侧向力的变化规律与微扰动片固定在Φs=20°时的“正”稳态偏航力矩变化曲线相同;在β=-4°~8°范围内偏航力矩系数近似为线性变化规律。Φs=-10°、0°、10°三种情况的偏航力矩变化曲线的线性段近似平行。从图9,图10结果可以推出,侧向力和偏航力矩控制曲线关于β=0°位置左右是反对称的,即在迎角α=55°、侧滑角β=-24°~+24°范围内,改变细长体模型头部微扰动摆振片的Φs角,都可以获得可比例控制的侧向力和偏航力矩。
图10为不同侧滑角下改变微扰动片摆振平衡位置时偏航力矩的变化规律。从图中可以看出,在不同侧滑角下改变微扰动片摆振平衡位置的周向角Φs的偏航力矩曲线都是线性递减,且都与x轴相交。这说明在有侧滑角的情况下,改变微扰动片摆振平衡位置的周向角Φs也可以控制偏航力矩的大小以及方向。

图9 改变微扰动片摆振平衡位置时偏航力矩与侧滑角之间的变化规律(α=55°,ReD=55000)Fig.9 The transiting law between lateral moment in yaw with sideslip angle when changing equilibrium position of micro-tip-strake(α=55°,ReD=55000)
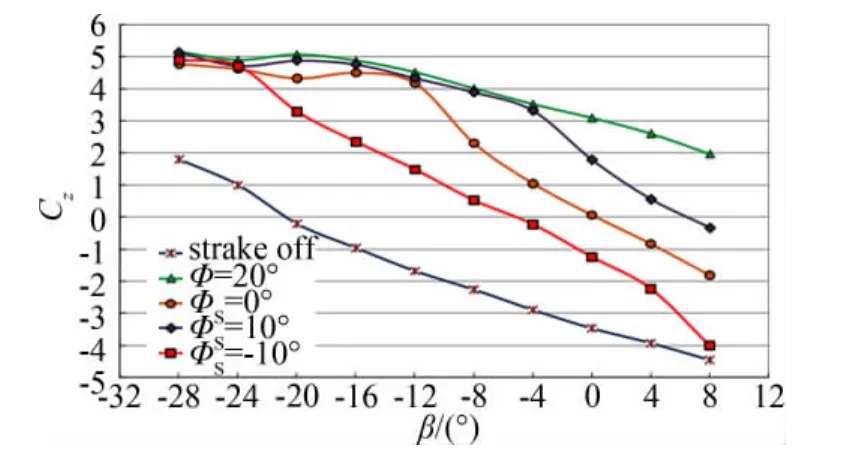
图10 不同侧滑角下改变微扰动片摆振平衡位置偏航力矩的变化规律(α=55°,ReD=55000)Fig.10 The controlling law of yawing moments varying with sideslip angles while changing equilibrium position of micro-tip-strake(α=55°,ReD=55000)
由此可知,在一定的侧滑角范围内改变ΦS都可以提供有效的比例控制力矩。因此当飞行器发生侧滑时,采用闭环反馈的前体非对称流动主动控制方法,可提供飞行器所需飞行控制力矩进行“纠偏”。
3 结 论
(1)在一定的侧滑角范围内,改变微扰动片的有效周向角位置Φs(ef)可以提供有效的“纠偏”飞行控制力矩,这为今后飞行器在大迎角机动飞行控制提供了一种有潜力的技术手段。
(2)改变侧滑角,模型侧向力和偏航力矩的变化规律取决于有效微扰动片摆振平衡位置的周向角Φs(ef)。在不同平衡周向角Φs位置(Φs(ef)在±16°之间变化)改变侧滑角,模型侧向力和偏航力矩为线性变化规律。
(3)大迎角时,改变细长旋成体模型的侧滑角实际上是改变了模型迎风面的驻点位置,即改变微扰动片的有效周向角位置。β较小时对微扰动片的周向位置角影响较大,对有效迎角的影响不大。
[1]NG T T,MALCOLM G N.Aerodynamic control using forebody blowing and suction[R].AIAA 91-0619.29th Aerospace Sciences Meeting,1991.
[2]CELIK Z Z,ROBERTS L.Aircraft control at high-alpha by tangential blowing[R].AIAA 92-0021.
[3]KRAMER B R,SUAREZ C J,MALCOLM G N.Forebody vortex control with jet and slot blowing on an F/A-18[R].AIAA CP 93-3449.
[4]GITTNER N M,NDAONA CHOKANI.Effects of nozzle exit geometry on forebody vortex control using blowing[J].Journal of Aircraft,1994,31(3):
[5]FREDERICK W R.Microblowing for high-angle-of-attack vortex flow control on a fighter aircraft[R].AIAA 96-0543.
[6]邓学蓥.前体非对称涡流动及其扰动主动控制技术[C].空气动力学前沿研究论文集,2003.
[7]DENG X Y,TIAN W,MA B F,et al.Recent progress on the study of asymmetric vortex flow over slender bodies[J].ACTA Mech.Sin.,2008,24:475-87.
[8]WANG Y K,WEI Z F,DENG X Y.An experimental study on forebody vortex flow control technique using combined perturbation[J].Chinese Journal of Theoretical and Applied Mechanics,2007,39(4):433-441.(in Chinese)王延奎,魏占峰,邓学蓥,等.飞机大迎角非对称涡组合扰动主动控制研究[J].力学学报,2007,39(4):433-441.
[9]CAO Y H,DENG X Y.Control experiment of aircraft fuselage aerodynamic forces at high angle of attack[J].ACTA Aerodynamica Sinica,1998.16(4):394-399.(in Chinese)曹义华,邓学蓥.机身大迎角气动力的控制实验[J].空气动力学学报,1998,16(4):394-399.
[10]MENG X S,GUO Z X,LUO S J.Control of asymmetric vortices over a slender conical forebody using plasma actuators[J].ACTA Aeronautica Astronautica Sinica,2010,31(3):500-505.(in Chinese)孟宣市,郭志鑫,罗时钧,等.细长圆锥前体非对称涡流场的等离子体控制[J].航空学报,2010,31(3):500-505.
[11]WANG J L,LI H X,MENG X S.Study on the characteristics of fore-body separate f low at high angle of attack under plasma control[J].Journal of Experiments in Fluid Mechanics,2010,24(2):34-38.(in Chinese)王健磊,李华星,孟宣市,等.大迎角分离流场在等离子体控制下的特性研究[J].实验流体力学,2010,24(2):34-38.
[12]GU Y S,MING X,ZHANG Z M.Side forces control of a calibration model plane at high angle of attack[A].11thSeparation Flow Control Conference[C],2006.(in Chinese)顾蕴松,明晓,张召明.全机模型大迎角侧向力控制的实验研究[A]//第11届全国分离流、涡运动和流动控制会议论文选集[C],2006.
[13]GU Y S,MING X.Forebody vortices control using a fast swinging micro-tip-strake at high angles of attack[D].Nanjing:Nanjing University of Aeronautics and Astronautics,2004.(in Chinese)顾蕴松,明晓.大迎角非对称流动的非定常弱扰动控制[D].南京:南京航空航天大学,2004.
[14]GU Y S,MING X.Forebody vortices control using a fast swinging micro-tip-strake at high angles of attack[J].ACTA Aeronautica Astronautica Sinica,2003,24(2):102-106.(in Chinese)顾蕴松,明晓.大迎角非对称流动的非定常弱扰动控制[J].航空学报,2003,24(2):102-106.
[15]GU Y S,MING X.Proportional side force control of slender body at high angle of attack[J].ACTA Aeronautica Astronautica Sinica,2006,27(5):746-750.(in Chinese)顾蕴松,明晓.大迎角细长体侧向力的比例控制[J].航空学报,2006,27(5):746-750.
[16]MING X,GU Y S.Control of asymmetric flow fields of slender bodies at high angle of attack[J].Chinese Journal of Aeronautics,2006,19(2):168-174.
[17]MING X,GU Y S.An innovative control technique for slender bodies at high angle of attack[R].AIAA 2006-3688.
[18]WONG F C,BOISSONNEAULT O,LECHEVIN N,et al.Development of a shape memory alloy-based micro-flow effector for missile side force control[R].AIAA 2007-1701.
猜你喜欢
社会科学战线(2022年9期)2022-10-25
舰船科学技术(2022年11期)2022-07-15
交通科技与管理(2022年8期)2022-05-07
航空发动机(2022年1期)2022-03-11
北京航空航天大学学报(2021年6期)2021-07-20
航天电子对抗(2019年4期)2019-06-02
科技信息·下旬刊(2018年9期)2018-10-21
航空发动机(2018年4期)2018-09-18
科技传播(2014年4期)2014-12-02
筑路机械与施工机械化(2014年2期)2014-03-01
