基于特征融合的均值偏移目标跟踪算法
2014-03-27 05:52:26高瑞华
云南民族大学学报(自然科学版) 2014年5期
高瑞华,杨 欣
(南京航空航天大学 自动化学院,江苏 南京 210016)
运动目标检测与跟踪是智能监视系统的基础,是各种后续处理的前提,如目标分类、行为理解等.运动目标检测是指从视频流中实时提取目标,一般是确定目标所在区域等.运动目标的跟踪主要由目标识别与目标匹配两部分组成,在识别的过程中,利用目标检测的关键技术确定每一帧图像的目标位置,匹配的过程更为关键,需要考虑前景目标的固有属性及匹配是否适应的匹配算法.本文基于图像匹配来实现对运动目标的跟踪,而此类方法大致分为5类:基于特征的运动目标跟踪算法、基于区域的运动目标跟踪算法、基于模型的运动目标跟踪算法、基于运动估计的目标跟踪算法及基于频域的运动目标跟踪算法[1].
20世纪70年代, Fukunaga和Hosteler[2]提出了均值偏移(Meanshift)算法,它是一种无参密度估计法.均值偏移算法的含义是均值偏移向量,它使每一个点“漂移”到密度函数的局部极大值点.但是均值偏移算法在当时并没有得到广泛的重视,直到1995年,Cheng Yi-zong[3]对该算法做了2方面的改进,首先定义了一族核函数;其次设置了一族权重系数,通过定义的核函数,可以看出偏移量对均值转移量的贡献,然后基于权重系数大小,使得不同的样本点的重要性不同.通过改进,该算法得到了重视和广泛应用.但均值偏移算法中颜色直方图是对目标特征一种比较弱的描述,当有遮挡等干扰时,算法效果欠佳.基于此,本文提出了将颜色特征中融入像素点的位置信息的算法来实现目标跟踪,通过实验可以发现,该法能较好地适应复杂背景视频序列,并且在跟踪准确性上有所提高.改进了经典均值偏移算法的不足,提高了算法的鲁棒性和可靠性.
1 均值偏移算法
1.1 均值偏移算法原理
均值偏移算法的核心就是颜色特征[4-5].其采用颜色直方图对目标区域建模.通过计算特征空间中每个特征值的概率建立目标模型.其中目标模型颜色空间特征值为μ,且μ=1,2,…,m.采用核密度估计的方法,则目标模型概率密度如下:
(1)

候选模型概率密度如下:
(2)


1.2 相似性度量函数
相似性度量函数描述了目标模型和候选模型之间的距离或相似程度.目标模型与候选模型匹配过程实质上是寻找最优的y,使得相似函数值最大的过程,巴氏系数具有一定的优越性,使用效果很好,得到了广泛的应用,是最常用的均值偏移算法的相似性度量函数,本文选取巴氏系数作为相似性度量,定义2个概率密度分布的距离为[6]:
(3)
(4)
1.3 目标定位

(5)
式(5)中的权重系数ωi如下:
(6)
为了获取最高相似度或者最大巴氏系数,对当前帧的目标位置进行更新处理,然后将目标中心y0偏移至目标的下一个候选位置y1,
(7)
式中,g(x)=-k′(x)=1,则式(7)简化为
(8)
2 融入位置特征的均值偏移算法
均值偏移算法在进行目标跟踪过程中一般只关心候选目标和目标模板在颜色分布上的相似性, 而不关心目标在实际空间上的运动情况, 即没有利用目标的空间运动位置、速度及加速度信息.由此,我们便想出若同时融入目标区域像素点的空间位置特征,对运动目标在下一帧中的位置进行预测,运动目标的位置由均值偏移算法得出的目标中心位置和根据运动目标在任一时刻的物理运动特征预测得出的目标中心位置进行加权综合考虑,这样目标匹配精度将有所提高,相应的跟踪精度也会提高.
2.1 空间位置特征
我们引入目标运动的状态向量[8].根据物体运动的物理意义,存在状态向量s(k)、v(k)、a(k)(k=1,2,…,n),分别表示k时刻目标所在的位置、速度及加速度,其中vx(k)、vy(k)、ax(k)、ay(k)分别表示运动目标在x、y方向上的速度与加速度,则运动目标的位置s(k)=(sx(k),sy(k)),其中sx(k)、sy(k)分别为运动目标在x、y方向上的位置向量.根据运动的公式可知:
(9)
(10)
通过上式,我们便可以得出运动目标的空间位置信息,并对运动目标在下一时刻的位置进行预测.式中Δt为第k时刻与第k-1时刻的时间间隔,由于采集的视频图像每秒钟都有固定的帧数,所以Δt的选取是固定不变的,本文中取为50 ms,则视频帧的采集速率为20帧/s.
2.2 引入空间位置信息后的目标定位
确定运动目标的位置应综合考虑均值偏移目标跟踪算法得到的目标中心位置与运动估计得到的目标位置的关系[9-10],在两者之间设置一个调节比例因子λ∈(0,1),表示如下:
sy1(k)=λs(k)+(1-λ)y1.
(11)
由上式可以看出,引入空间位置信息后,运动目标的位置将由均值偏移得到的位置和运动预测位置共同决定.调节比例因子λ可根据经验判断及实验效果反复调节决定,当λ=0时,则目标位置为均值偏移算法得到的位置,当λ=1时,目标位置则为运动预测所得到位置.
在已知运动目标在k时刻及k-1时刻的位置sy1(k)、sy1(k-1)后,便可以对运动目标的速度和加速度参数进行更新.
(12)
(13)
(14)
(15)
式中,sy1x(k)=cos(sy1(k)),sy1y(k)=sin(sy1(k)).将运动目标的速度和加速度参数进行更新后,重新带入式(9)、(10)中计算出运动目标下一时刻新的位置信息.如此反复循环,就可对运动目标在各帧中的在下一时刻较为精确的位置作出判断.
2.3 算法流程步骤
初始化运动目标的位置、速度、加速度和调节比例因子λ.


Step3 依据公式(6)计算权重ωi;
Step4 根据公式(8)计算出新的位置y1;
Step5 由公式(9)、(10)计算运动估计的目标位置s(k);

Step7 根据公式(12)~(15)更新运动估计参数v(k)、a(k),更新s(k);
Step8 最终根据均值偏移算法得出的目标位置y1和运动估计得出的位置s(k)调节权值计算出运动目标的最终位置sy1(k).
3 实验结果
为了直观检验出算法的效果,基于Matlab环境,本文对一些视频序列进行了实验,选用一组视频图像分别用传统均值偏移算法和融入运动目标空间位置特征的算法进行跟踪实验,通过实验,可以发现传统的均值偏移算法在目标发生遮挡后容易跟丢目标,而本文算法在传统均值偏移算法基础上增加了像素点空间位置信息后,在运动目标发生遮挡的情况下仍然可以准确跟踪目标.
经过分析,原因是由于均值偏移跟踪算法只是寻找目标一定范围内与之最匹配的候选目标,而没有考虑到目标在空间运动过程中的一致性和连贯性; 而本文改进的均值偏移算法由于加入了对目标空间运动位置的预测, 保证了目标空间运动过程中的一致性和连贯性, 改善了对运动目标的跟踪效果, 在目标发生遮挡的情况下, 仍能实现有效的跟踪,提高了系统的鲁棒性.


针对改进算法前后的巴氏系数匹配程度进行了对比,结果见表1.从表1可以看出, 与原算法比较,改进后的均值偏移跟踪算法在匹配程度上有了较大的提高, 匹配程度方差改善了 0.020 6,从而使系统目标跟踪的鲁棒性得以提高.
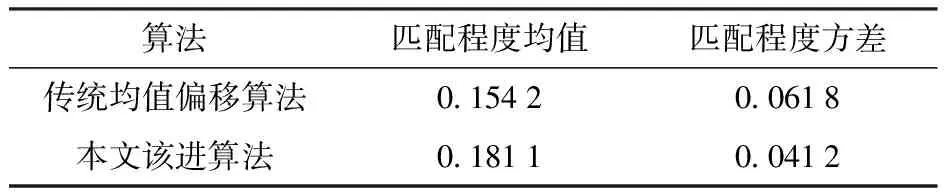
表1 巴氏系数匹配程度对比
4 结语
把运动目标的空间位置信息融入到传统均值偏移算法当中,由于加入了对目标空间运动位置的预测, 保证了目标空间运动过程中的一致性和连贯性, 改善了对运动目标的跟踪效果, 在目标发生冲突、部分遮挡的情况下, 仍能实现有效的跟踪,使得跟踪的准确性提高,对传统均值偏移算法中存在的不足有了较明显的改进.从实验结果也可以看出,本文算法能够准确、有效、实时地跟踪目标,增强了跟踪算法鲁棒性.但是空间位置信息的引入,使得本文在增加算法鲁棒性的同时,也带来了计算复杂度大的问题,计算量有所增加,实时性降低,但能够满足一般的工程项目实时性要求.
参考文献:
[1] 候志强,韩崇昭.视觉跟踪技术综述[J].自动化学报,2006,32(4):603-617.
[2] HOSTELER L D.The estiamtion of the gradient of a density function, with applications in pattern recognition[J].IEEE Ttansactions on Information Theory, 1975,21(1):32-40.
[3] CHENG Y Z.Meanshift.mode seeking and clustering[J].IEEE Transactions Analysis and Machine Intelligence,1995,17(8):790-799.
[4] 徐琨,贺昱曜,王卫亚.基于CAMSHIFT的自适应颜色空间目标跟踪算法[J].计算机应用,2009,29(3):757-760.
[5] DORIN C.Kernel-based object tracking[J].IEEE Transactions on Pattern Analysis and Machine Intelligence, 2003, 25(5): 564-577.
[6] 曹荣, 一种基于尺度不变特征变换Shift的图像水印算法[J].云南民族大学学报:自然科学版,2012,21(5):361-364.
[7] DORIN C, MEER P.Mean shift: A robust approach toward feature space analysis[J].IEEE Transactions on Pattern Analysis and Machine Intelligence , 2002,24 (5):603-619.
[8] 王宾.基于多特征融合的均值漂移视频目标跟踪算法[J].小型微型计算机系统,2006,27(9):1476-1479.
[9] 张志佳,黄莎白,史泽林,新的基于边缘特征的图像相关匹配方法 [J].红外与激光工程, 2003, 32(6): 635-638.
[10] 赵欣,陈锋,吴立知.一种改进的mean-shift运动目标跟踪算法[J].通信技术, 2011, 11(44): 76-79.
猜你喜欢
疯狂英语·新策略(2019年10期)2019-12-13 08:43:28
当代陕西(2019年10期)2019-06-03 10:12:04
中学生数理化·七年级数学人教版(2018年11期)2019-01-31 02:39:26
娃娃乐园·综合智能(2018年23期)2018-12-26 09:10:20
娃娃乐园·综合智能(2018年3期)2018-03-22 06:13:46
数学小灵通·3-4年级(2017年9期)2017-10-13 08:10:54
中国照明(2016年6期)2016-06-15 20:30:14
高中生学习·高三版(2016年1期)2016-05-30 05:45:06
中学生数理化(高中版.高二数学)(2016年4期)2016-03-01 03:46:20
浙江理工大学学报(自然科学版)(2015年5期)2015-03-01 02:54:01