
MEMS微型惯性测量组合的标定
2014-03-26 02:10陈湾湾陈智刚付建平
仪表技术与传感器 2014年12期
陈湾湾,陈智刚,付建平
(1.中北大学,地下目标毁伤技术国防重点学科实验室,山西太原 030051;2.清华大学精密仪器系,北京 10084)
0 引言
MIMU (micro inertial measurement unit)——微加速度计和微陀螺仪构成的微型惯性测量组合,具有体积小、质量轻、寿命长、可靠性高、成本低和适应环境能力强等优点,近些年,随着微机电系统MEMS(Micro Electronic Mechanical System)技术的发展,MIMU在姿态测控、武器制导和其他军事及民用领域具有广阔的应用前景[1-3],越来越多的人投入到MIMU的研究领域中。
陀螺和加速度计是微惯性组合的核心器件,由于硅微加工工艺、自身工作原理等的不同[4-5],加速度计和陀螺的零偏对惯性导航和定位误差影响分别按时间的二次方和三次方增长[6],因此MIMU在使用之前必须对其标定,确定初始零偏、交叉耦合、标度因数、安装误差等参数。根据MEMS惯性器件的误差模型特点,采用十二位置翻转法对惯性组合单元进行标定。根据实验室标定的结果,对微惯性组合单元进行误差补偿,对于该MIMU的真实性能参数以及进一步提高导航精度有一定的参考价值。
1 MIMU测量模型
1.1 三轴MEMS加速度计误差模型
在静态常温测量条件下,设载体受到的比力为Aa=[axayaz],由于MEMS器件三轴加速度计安装位置与载体重心不重合,导致加速度计测量结果存在臂杆效应。因此考虑臂杆效应的三轴加速度计的理想测量值为:
(1)

式中Ka为标度因数和安装误差、交叉耦合系数矩阵。
(2)
式中:Ameas为加速度计测量输出;Abias是一个3元素矢量,表示标定的固定零偏,补偿温度误差;Bv是一个3行3列矩阵,表示振摆误差系数;w是一个3元素矢量,表示测量噪声。
三轴加速度计测量模型框图如图1所示。

图1 三轴加速度计测量模型框图
1.2 三轴MEMS陀螺仪误差模型
在与加速度计测量条件相同的条件下,假定考虑地球速率分量的存在,设ωmeas为MEMS三轴陀螺仪的测量输出;ωb为载体运动角速度;Kg为陀螺仪标度因数、安装误差和交叉耦合系数矩阵,则陀螺仪输出为:
(3)
式中:ax,ay,az是作用在运载体三轴上的加速度;ωbias是一个3元素矢量,表示零值漂移;Bg是一个三阶对角阵,表示g相关零偏系数;Bae是一个3×3矩阵,表示非等弹性系数;Bai是一个3×3矩阵,表示非等惯性系数;w是一个3元素矢量,表示测量噪声。
根据上述分析,建立三轴陀螺仪测量模型框图,如图2所示。

图2 三轴陀螺仪测量模型框图
2 MIMU实验室标定方法
惯性器件的性能与精度对飞行器的姿态和飞行弹道有直接的影响,通过标定测试,可以判定惯性仪器是否符合技术条件所要求的性能和质量指标,发现其故障与误差来源及其规律,为改进MIMU惯性组合技术和进行系统补偿提供依据。根据已经建立的MIMU的数学误差模型,对加速度计和陀螺仪的零偏、标度因子、安装误差等指标进行标定。
该实验待标定的MIMU核心器件是相互正交的三轴陀螺仪、三轴加速度计,通过适当的工艺方法,组装在微惯性测量单元的框架上。
在进行转台标定之前,首先要进行初始对准,确定待测MIMU的测量基准。该实验标定中,以加速度计的敏感轴为基准轴。即调整加速度计x轴与转台内框旋转轴重合,根据加速度计的x轴输出(ax)曲线判断是否重合。待x轴与内框重合后,旋转中框,使得x轴处于水平位置;然后旋转内框,使得y轴处于水平位置;通过以上步骤,保证了x、y轴分别与内框轴和中框轴平行,只有满足初始对准的条件后才能进行MIMU的实验室标定。MIMU实验室标定的步骤如下:
(1)将待测MIMU通过专用工装安装在三轴位置速率转台上,按照十二位置翻转法对MIMU进行翻转,每个位置保持30 s以上(以固定采样率采集数据),即将MIMU的x,y,z轴依次朝天和朝地,每一次朝天和朝地各测量2次,2次区别是MIMU绕天向旋转180°,测得加速度计、陀螺仪输出分别朝天和朝地共12组数据,求这12组MIMU输出的平均值。
(2)利用测得的12组数据,通过最小二乘法可求出MIMU惯性器件的零偏、标度因数、交叉耦合系数。具体计算公式为式(6)和式(7)。
各轴输入加速度向量:
加速度输出Ua,则有

(4)
根据最小二乘公式,得
(5)

(6)
式中:ua0为加速度零偏;Ka的对角线元素为加速度标度因数Sj,Ka的非对角线元素为加速度的交叉耦合系数。
按照惯性器件安装误差角的计算推导,结合该标定方法,确定该矩阵的交叉耦合系数计算加速度计的安装误差为:



(7)
根据最小二乘公式,得
(8)

(10)
式中ug0是角速度的零偏。
陀螺仪G值敏感性相关的安装误差角计算与加速度计类似,不再赘述。
(4)陀螺仪角速度标度因数、安装矩阵。与步骤(1)类似,将MIMU通过专用工装安装在三轴位置速率转台上,三轴位置速率转台的三轴依次分别在以±0.1(°)/s、±0.2(°)/s、±0.5(°)/s、±1(°)/s、±2(°)/s、±5(°)/s、±10(°)/s、±20(°)/s、±50(°)/s、±100(°)/s角速度转动;建立陀螺仪的加速度输入矩阵,按照最小二乘法,对采集得到的数据进行数据处理,算出标度矩阵:
(9)
3 MIMU实验室标定结果
依据MIMU误差模型建立的标定方法,必须通过实验验证其可行性,结合惯性测量微系统技术的应用研究项目,采用上述方法对某MIMU进行标定,并对实验结果进行简要分析。
3.1 MIMU加速度计零偏稳定性标定结果
MIMU加速度计标定结果为:
Sj=[0.999 575 0 0.999 575 0 0.992 750]

表1 加速度计安装误差角(交叉耦合) (″)
以加速度计为基准标定MIMU惯性测量单元各项误差,将得到的加速度计标度矩阵应用于敏感轴x输入朝天的样本中,即加速度计x、y、z三轴输入分别为1g、0g、0g的输入条件下,加速度计的数据输出,对MIMU加速度计输出进行补偿,补偿前后加速度计敏感轴的输出分别为图3所示,不难看出补偿后加速度计三轴输出精度均得到提高。
3.2 MIMU陀螺仪零偏和G值敏感性
将实验结果与MIMU陀螺仪x敏感轴的Allan方差曲线对比可知,10 s平均时间的方差为5.5(°)/h,而此处Kg给出的G值敏感性范围为1~20(°)·h-1·g-1)(MIMU数据手册给出的结果为15(°)·h-1·g-1),故此处计算得到的G值敏感性可信度不高。分析造成这种结果的原因是由于该次十二位置翻转法的采样时间长度为较短,仅为10 s。为了解决此问题,根据MIMU陀螺仪Allan方差曲线可知,有两种方法可以选择:一是提高输入加速度;二是增加采样时间。
3.3 陀螺仪标度因数、安装矩阵
Sj=[1.001 056 1.000 889 1.000 657]
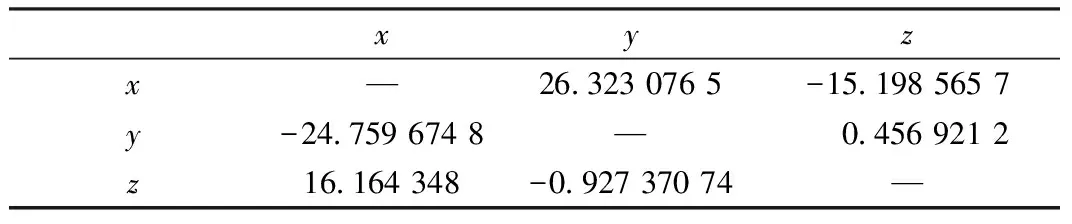
表2 陀螺仪安装误差角(交叉耦合) (″)
观察实验结果,发现此次标定陀螺安装误差角很大,尤其是x轴与y轴、z轴之间的安装误差角较大,而y轴和z轴之间的安装误差角相较而言较小。究其原因,标定的基准是加速度计,可能是由于陀螺仪和加速度计之间的安装工位不同造成的。选取其中一组样本,陀螺敏感轴x输入为10(°)/s时的样本进行分析,其他样本数据也可以采用同样的方法进行补偿。补偿误差之前陀螺仪x轴、y轴和z轴平均角速度输出分别为10.009 929(°)/s、-0.106 228(°)/s和0.012 539(°)/s,补偿安装误差角以后的陀螺仪x轴、y轴和z轴输出分别为9.993 373 4(°)/s、-0.007 078 55(°)/s,0.005 219 80(°)/s,补偿前后三轴陀螺仪敏感输出如图5所示,通过安装误差和零偏的补偿,陀螺仪输出误差数量级降低了1~2个数量级,说明该方法的可行性。

(a)x 轴输出

(b) y 轴输出
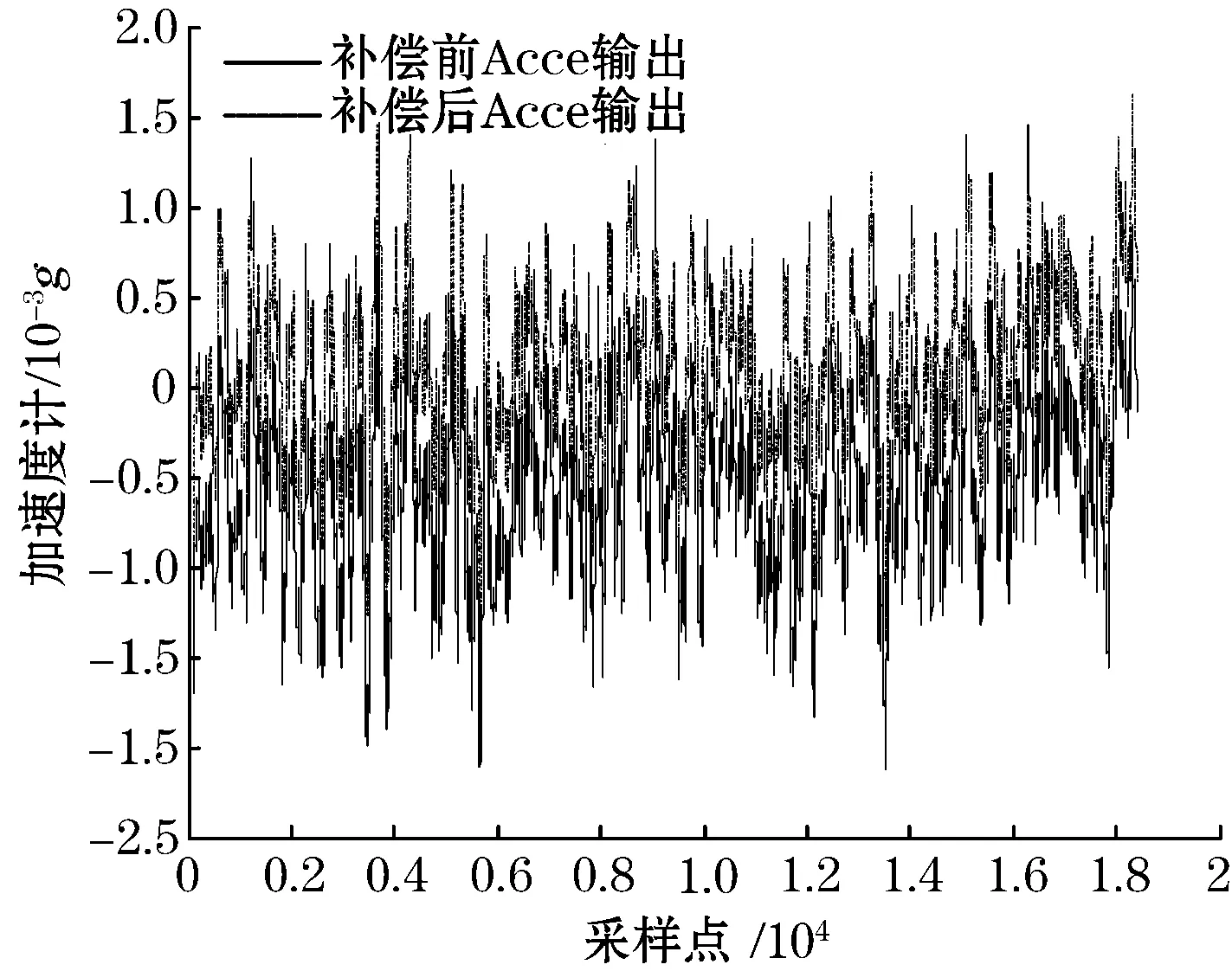
(c) z 轴输出图3 加速度计x、y、z轴静态补偿前后输出曲线

图4 陀螺仪x轴Allan方差曲线

(a)x 轴输出

(b)y 轴输出

(c)z 轴输出图5 陀螺仪x、y、z轴输出
4 结束语
为了获取MIMU相关的误差项源参数,建立十二位置翻转法模型,并通过在实验室采用该方法标定某MIMU惯性测量单元的零位偏差、标度因子和交叉耦合,验证了该标定模型的可使用性和正确性;结合标定结果对MIMU静态输出进行误差进行补偿,使得该MIMU的导航精度进一步提高,为正确使用该MIMU提供理论基础,并且由于该模型的通用性,可用于其他陀螺仪和加速度的标定,具有一定的参考使用价值。但是仍存在一些缺陷:标定方法并没有考虑到温度因素对MIMU的影响;标定之前的初始对准精度有待进一步提高;十二位置翻转法标定MIMU陀螺仪G值敏感性不可信,需要进一步改进标定方案;误差补偿方法可以进一步探索。
参考文献:
[1] METTLERE H F Y.Micro guidance and control synthesis;new the componets,architectures and capabilities //Proceeding of the National Aeronautics and Space Adiministration.California,USA. 1993:289-384.
[2] 任大海,顾启泰,毛刚,等.微型惯性测量组合标定技术 .清华大学学报,2001,41 (8):21-24.
[3] 颜苗,翁海娜,谢英.系统参数标定以及惯性元件安装误差测量与补偿技术研究 .中国惯性技术学报,2006,14(1):27-29.
[4] 孙宏伟,房建成,盛蔚.一种基于 MEMS的微惯性测量单元标定补偿方法 .北京:北京航空航天大学学报,2008,34(4):439-441.
[5] 罗兵.MIMU微惯性测量单元误差建模与补偿技术:[学位论文] .长沙:国防科技大学,2007.
[6] 尚捷.MIMU及其与GPS组合系统设计与实验研究:[学位论文] .北京:清华大学,2005.
猜你喜欢
北京航空航天大学学报(2021年9期)2021-11-02
中国建材科技(2020年6期)2020-03-23
中国惯性技术学报(2019年1期)2019-05-21
百科探秘·航空航天(2017年9期)2017-12-31
科技经济市场(2017年5期)2017-09-16
中国惯性技术学报(2017年1期)2017-06-09
山东工业技术(2016年15期)2016-12-01
系统工程与电子技术(2016年7期)2016-08-21
河北工业大学学报(2016年6期)2016-04-16
探测与控制学报(2015年4期)2015-12-15
