
主动避振自稳定的光电速度位移传感器设计
2014-03-26 00:58张春友吴晓强
仪表技术与传感器 2014年12期
张春友,吴晓强
(内蒙古民族大学机械工程学院,内蒙古通辽 028000)
0 引言
光电编码器在现代高精度控制系统中常被用来检测对象的位置和速度等参数。光电编码器分两大类,(绝对式和增量式)。绝对式编码器常用于检测位置和角度。增量式编码器常用于检测距离和速度,其价格较绝对值式编码器低,因此使用比较广泛。在某些大型机械设备上,在实际生产过程中振动较大,因此测速编码器旋转轴的晃动会引起编码器输出波形的抖动,从而出现误计数现象。即使单次误差较小,当累计到一定程度,就使得测量结果产生较大偏差。因此,文中提出一种主动避振的设计,来减轻机械振动对测量精度的影响,使得振动对测量的影响控制在系统允许的容错范围之内。
1 误差分析
1.1 传统设计
传统的光电编码器的鉴相与计数方法有很多种。但目前都未曾对机械振动而产生计数误差的问题采取有效的解决方法。有研究人员尝试在电路上解决振动对计数产生的影响,也有研究人员尝试在软件层面上去解决问题,但都不能得到理想的效果。在电路上,振动频带越宽,其减振电路设计越复杂。因此,电路减振设计无法适应各种振动频带的工作场合。在软件上,通过做滤波设计来减少振动带来的计数误差,使得计数实时性下降。因此,在高速计数时,软件减振措施也有其局限性[1]。
1.2 误差产生原因
机械设备例如起重机,尤其是需要精确定位的起重机,对位置测量精度要求极高。当传感器与机械机构硬连接安装时,机械机构运行中产生的振动就通过硬连接结构传递到传感器上。光电编码器内部是由精密的光学电子结构组成的,不连续的机械振动将会导致光电编码器的主码盘产生高频振动,从而导致输出脉冲抖动[2],造成系统的计数误差。
如图1所示,由于某些大型机械在横向行走速度较慢,但纵向振动频率较大,导致输出信号抖动。

图1 增量式编码器低速抖动信号
2 减振系统设计
文中将传统的速度位移传感器和避振系统结合起来,提出一种可以自适应各种振动频率的主动避振光电速度位移传感器。
2.1 传统测速传感器介绍
传统的速度位移传感器主要包括编码器、信号调理电路、计数电路[3]。信号调理电路主要完成倍频或者鉴别相位等工作,计数电路主要完成脉冲计量工作,一般为单片机。根据单位时间内计得的脉冲个数即可推算出被测对象的速度和位移[4]。传统速度位移传感器方案如图2所示。

图2 传统速度位移传感器方案
2.2 减振结构设计与工作原理
机械振动容易造成机械机构永久性损害。传统避振设计一般是通过在容易产生损坏的部位安装弹簧来减轻振动,例如汽车的悬挂系统。直到近年来,磁流变液才受到关注。
磁流变液是一种由高磁导率且低磁滞性的微小的软磁性颗粒和非导磁性液体混合而成的磁性软粒悬浮液,这种悬浮液体在零磁场条件下呈现出低黏度的特性,但是在强磁场作用下,呈现出高粘度、低流动性的液体特性。
磁流变液的这种流变可控性使其能够实现阻尼力的连续可变,从而可以代替弹簧,达到对振动的主动控制目的。当液体被注入减振器活塞内的电磁线圈后,线圈的磁场将改变其流变特性(或产生流体阻力),从而在没有机电控制阀且机械装置简单的情形下产生反应迅速、可控性强的阻尼力。减振控制系统应用磁流变(MR)液体和不带机电控制阀的减振器提供反应迅速、减振性能强大的阻尼力控制[5]。
文中结合磁流变减振系统,对传统速度位移传感器进行改造。减振结构设计原理如图3所示。图3中,X1为速度位移传感器的振动位移;X2为振动物体的振动位移;K为速度位移传感器与振动物体连接刚度;C为磁流变减振系统的可控阻尼系数,也就是该系统中设计的被控量。
磁流变减振系统控制器的硬件原理框图如图4所示。
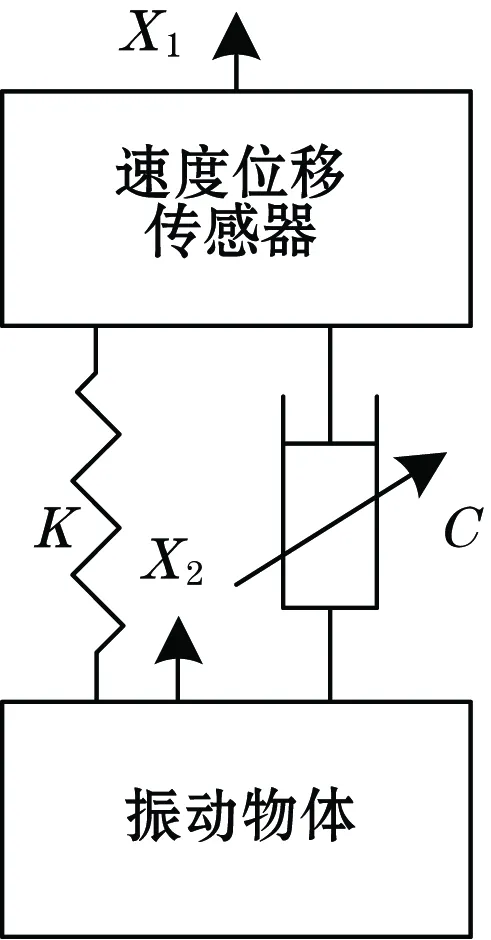
图3 减振结构原理图

图4 磁流变减振系统硬件原理框图
图4中,当被控对象发生振动时,加速度传感器检测出被控物体的振动特性,然后经过信号处理环节,对所获得的包含振动信息的传感器信号进行分析和调理,最后送入MCU.MCU根据所接收到的振动信息进行智能决策,并产生相应的控制电压输出,系统将输出电压信号送入可控电源,最后送出一个驱动电流到磁流变减振器的励磁线圈上形成强磁场。磁流变液在这个外加磁场的作用下,按照磁流变液的流变特性改变自身阻尼特性,对被控物体形成一个反方向的阻尼作用力,最终达到减振效果[6]。MCU可以以1MHz的频率连续不断地调节阻尼力的大小。通过阻尼调节,有效地过滤机械振动。
2.3 减振控制器原理
控制器的控制策略采用模糊PID开关切换控制算法[7],其基本控制思想是在大的偏差范围内采用模糊控制策略,而在较小的偏差范围内转成PID控制。模糊控制和PID控制的转换由主控制器根据程序事先给定的偏差范围自动实现。其控制算法实现原理如图5所示。

图5 模糊PID控制原理
PID控制器采用增量式的PID控制算法,模糊控制器采用双输入、单输出结构。以振动方向的加速度以及其变化量作为控制器输入量,以磁流变减振器的阻尼系数作为输出量。
控制器采用STM32系列微控制器。控制信号采用PWM输出。控制器软件部分包括系统的初始化,数据采集与处理,核心控制算法和PWM信号输出。控制器主流程如图6所示。

图6 控制器程序流程图
3 系统仿真与实验
3.1 减振系统仿真
在Matlab平台上对减振系统进行了数值仿真,以判定控制系统的稳定性和控制算法的可靠性。分别输入单位阶跃激励信号和正弦激励信号,验证系统设计的有效性。
当系统输入单位阶跃激励信号时,采用模糊PID控制算法的加速度响应曲线如图7所示。系统在0.02 s左右即可达到基本稳定状态。系统响应时间短,收敛速度快。

图7 单位阶跃激励信号响应
当控制系统输入激励为正弦函数时,采用了模糊PID控制算法的加速度响应曲线如图8所示。系统稳定性较好,振动控制效果得到明显改善。
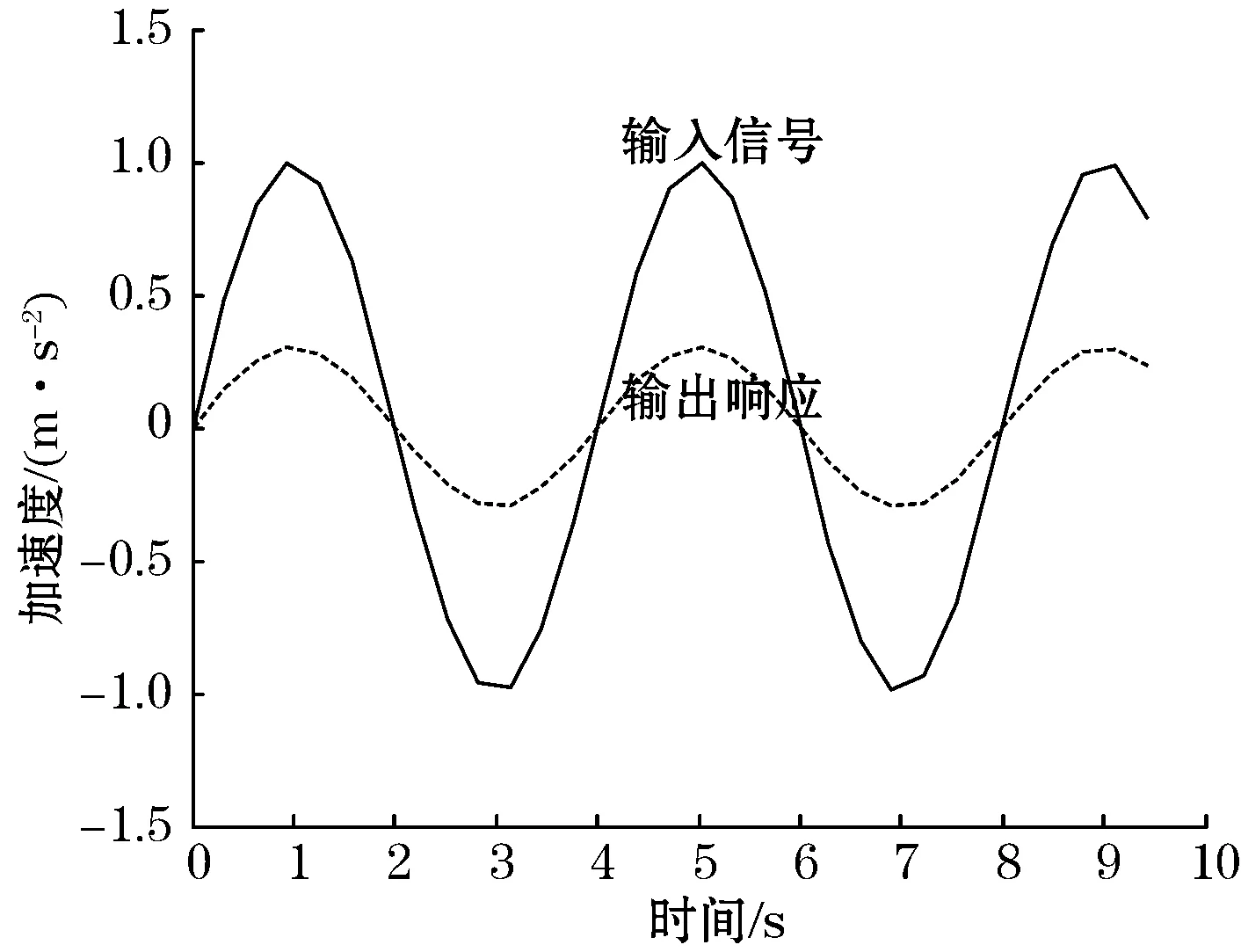
图8 正弦激励信号响应
3.2 整体系统实验
实验中采用400线的欧姆龙增量式编码器,对比加上避振系统前后编码器脉冲输出个数,还对比不同行程下累计脉冲个数的差异,实验结果如表1所示。由表1可以看出,加上避振系统后,脉冲计量误差显著降低,并且运行10 m的累计误差控制在20个脉冲以内。如果在实际应用中,通过降低编码器连接轮的直径,并在软件上进行定长校零,可将测量误差显著降低。

表1 整体实验数据
4 结束语
该设计首次将磁流变减振器引入光电速度传感器的减振设计中。磁流变减振器结构简单、制造成本低、响应快、稳定性高。磁流变减振器已经广泛应用于工程领域,技术成熟而且价格便宜。
该传感器采用主动避振的方式来降低机械振动对测量的影响,使得测量精度更高,更稳定,而且其硬件成本并未显著增加该传感器。适用场合广泛,可用于大型的机械设备,如港口起重机、煤矿机械等的速度位移参数精确测量。
参考文献:
[1] 张九才,王文祥,杨显志,等.增量式编码器抗抖性研究.自动化仪表,2005,26(10):38-39.
[2] 刘新建,李迅,张彭.光电编码器的误计数抑制电路设计.测控技术,1998,17(6):54-55.
[3] 费伟忠,沈建新,周勇.增量式光电编码器计数与接口电路的设计.微特电机,2007,35(1):17-18.
[4] 盛占石,黄赛帅,王青青.基于 STC89C52 智能计数控制.仪表技术与传感器,2012(1):57-59.
[5] 胡红生,蒋学争,李延成.压电自供能磁流变减振器设计及可控性实验.振动测试与诊断,2013,33(4):712-718.
[6] 李华琳,陈勇,黄琦,等.基于模糊PID控制的磁流变减振控制器.兵工自动化,2010,29(10):85-88.
[7] 杨建伟,孙守光,刘海波.汽车半主动磁流变悬架的自适应相对控制研究.系统仿真学报,2011,23(9):1951-1955.
猜你喜欢
网络安全与数据管理(2022年1期)2022-08-29
军民两用技术与产品(2021年1期)2021-07-28
铁道通信信号(2020年6期)2020-09-21
纺织科学研究(2020年1期)2020-05-21
制造技术与机床(2017年6期)2018-01-19
制造技术与机床(2017年7期)2018-01-19
西安工程大学学报(2016年6期)2017-01-15
探测与控制学报(2015年4期)2015-12-15
舰船科学技术(2015年8期)2015-02-27
汽车科技(2014年6期)2014-03-11
