
基于MC9S12HY64的电动车仪表盘设计
2014-03-26 00:58满庆丰
仪表技术与传感器 2014年12期
刘 侃,满庆丰
(北京航空航天大学机械工程及自动化学院,北京 100191)
0 引言
电动汽车作为绿色交通工具,采用电能取代石油等化石燃料作为动力,是一种未来交通的长远解决方案[1]。电动车仪表盘作为电动车与驾驶人员的信息交互显示平台,是适应电动车数字化、信息化发展的高新技术产品,负责显示指示灯状态、行驶速度、故障报警等实时信息以及电源电压、电流、电量等电池数据。
MC9S12HY64是适用于车载仪器的16位微处理器,提供步进电机控制器、CAN控制器等丰富的芯片资源,具有良好的稳定性及扩展能力,适合作为电动车仪表盘处理器。该仪表盘设计基于MC9S12HY64芯片的资源特点和外围功能模块,采用步进电机式全数字仪表盘的主流设计方案[2],具有线路布局简单、软件运行高效的实用优势,能够显示速度、指示灯、故障报警、运行里程等行驶信息以及电源电压、电流、剩余电量和续航时间等电池信息,可采用硬件信号和模拟信号双输入模式,并通过CAN总线与电池设备、车速检测设备进行数据通信。经过实验测试,该仪表盘各功能运行稳定,能够正确处理显示各项实时数据,并能与实验室研发的纯电动汽车锂电池管理系统正常通信,具有很高的实用价值。
1 仪表盘总体结构设计
1.1 MC9S12HY64芯片
MC9S12HY64采用薄型四方扁平式封装技术,提供100管脚、64管脚两种选择。它采用32 MHz总线频率的HCS12 内核,提供丰富的指令系统和强大的运算能力,片内拥有64 KB程序闪存、4 KB数据闪存以及4 KB随机存储。集成了丰富的外围资源,适用于电动车仪表盘设计。芯片外围功能模块介绍如下[3]:
(1)4个步进电机控制器,及大电流驱动管脚;
(2)40×4字段式LCD控制器;
(3)8通道10位分辨率模数转换器;
(4)2个增强型捕捉定时器;
(5)MSCAN控制器模块,支持CAN2.0A/B;
(6)SPI、SCI、I2C接口;
(7)8通道8位或4通道16位的PWM调制模块。
1.2 总体结构设计
仪表盘以MC9S12HY64处理器为核心控制单元,由数字显示、指针显示、故障报警、数据通信4个模块组成。系统总体结构如图1所示。
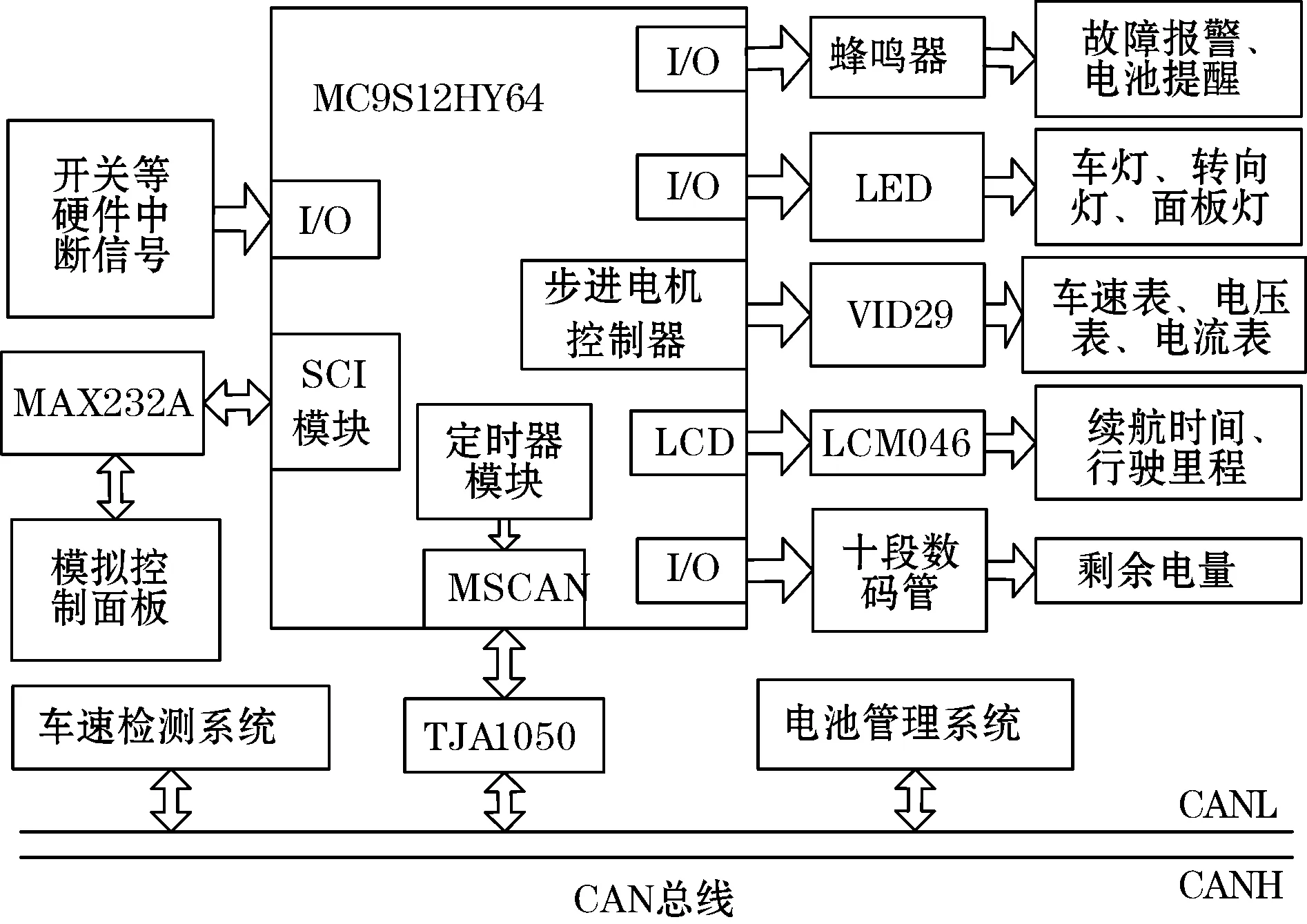
图1 仪表盘总体结构
以LED、十段数码管、液晶显示器作为数字显示模块,负责指示灯系统以及电池电量、续航时间、行驶里程的数码显示;以VID29步进电机作为指针显示模块,作为车速表、电源电压表和电流表;以蜂鸣器、LED作为故障报警模块,负责故障报警及信息提醒。仪表控制数据有2种输入模式:硬件开关I/O中断信号输入以及模拟控制面板SCI串行通信输入。仪表通信模块以CAN总线与电池管理系统和车速检测系统实现实时通信,获取电池信息以及车速信息,并可以通过CAN进行功能扩展。
2 主要功能模块设计
2.1 芯片供电与下载模块
MC9S12HY64芯片接收4.5~5.5 V供电电压。目前汽车蓄电池普遍提供的电源电压是12 V[4],仪表盘采用实验室研发的纯电动汽车锂电池管理系统输出的12 V车载电压。考虑到电池技术被视为电动车最主要的难关,该仪表盘设计双供电模式,主模式电压来源于电池设备12 V输出电压,通过LM2940芯片以及稳压滤波电路将12 V电压转为5 V电压。辅助模式采用5 V备用电源,手动开启,负责车载电池故障时辅助供电。
仪表盘为芯片提供开源BDM(Background Debug Mode)下载调试器,BDM背景调试模式是当前MCU普遍采用的调试方式之一。BDM串行接口通过BKGD引脚和外部主机进行通信,采用单线通信协议。下载口由6脚排针构成,仪表盘与BDM调试器相连接即可实现芯片BDM的调试功能[5],同时为系统设置复位键。电路设计如图2所示。下载器的设置不仅可用于早期系统开发,也可实现仪表盘使用中的硬件维护、功能更新和系统升级。
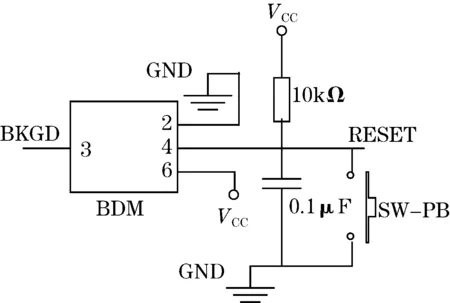
图2 下载器电路原理图
2.2 数字显示模块

图3 液晶屏控制电路图
数字显示模块的信号采用双输入模式,主模式信号来源于硬件开关触发中断。在硬件信号之外设计了由C#语言编写的虚拟控制面板,提供模拟辅助信号,可实现面板灯、车灯、液晶复位等功能模拟控制,通过RS232串行通信协议与MC9S12HY64提供的SCI接口通信,采用中断控制。MC9S12HY64芯片提供SCI模块、集成波特率寄存器、控制寄存器、数据寄存器,可方便地实现串口控制和数据收发。SCI初始化设置如下:
void INIT_SCI(void) {
SCIBD = 8000000/16/9600;//设置SCI波特率为9600
SCICR1 = 0x00;//设置SCI为正常模式,8位数据,无奇偶校验
SCICR2 = 0x2c;} //允许收发数据,允许接收中断
2.3 步进电机控制模块
指针显示模块提供车辆运行时最重要的3个参数:车速、电池电压、供电电流。仪表盘使用VID29-05p步进电机。该步进电机具有两相四线,经三级齿轮减速转动。仪表盘采用低功耗模式5 V输入电压,驱动电流需求小于20 mA.MC9S12HY64具有步进电机控制器,含16个大电流管脚直接驱动步进电机,可提供最大50 mV的电流供应,符合应用要求,所以硬件设计用引线与步进电机直连。系统中设计了车速表、电压表、电流表显示车辆及电池相关信息,如图4所示,M1、M2、M3分别驱动车速表、电流表和电压表。步进电机的直接驱动使得硬件设计更为简单,线路布局更加方便,与传统步进电机驱动方式相比更为简单高效。
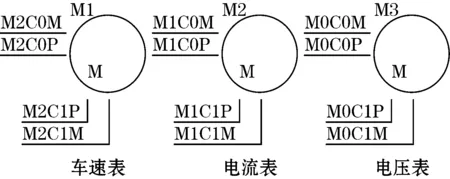
图4 步进电机电路原理图

void MC_INIT(void){
MCCTL0_MCPRE =0x03;//设置1/8的预分频
MCCTL0_FAST = 0; //设置11位分辨率
MCCTL1_RECIRC = 0;//高电平翻转
MCCTL1_MCTOIE = 0;//禁止定时器溢出中断
MCCC0_MCAM = 0x01; //左对齐PWM输出
MCCC0_MCOM =0x03; //双全桥模式
MCPER= 0x700;//分频定时器初始化
MCCTL0_MCTOIF = 1;} //定时器溢出标志清0
3 CAN总线通信
CAN 总线数据通信具有突出的可靠性、实时性和灵活性[6],特别适用于汽车计算机控制系统和环境温度恶劣、电磁辐射强和振动大的工业环境,因为逐渐成为汽车总线的代名词[7]。该仪表盘作为CAN总线一个节点,与电池设备、速度采集设备进行数据交互,并且可通过增加节点扩展所需功能。CAN节点由微处理器、CAN 控制器和CAN 收发器组成,MC9S12HY64芯片集成了MSCAN控制器,将MSCAN管脚直连CAN收发器TJA1050芯片即可实现通信。
以电池设备通信为例介绍软件流程,CAN总线与汽车电池通过双绞线连接,采用CAN2.0B扩展格式。CAN总线采用报文传输,包含数据帧、远程帧、错误帧和过载帧4种不同的帧格式[8]。在此采用标准帧格式,在软件中定义了报文结构体Can_msg,包括仲裁域、控制域和数据域所需变量。表1和表2分别列出了报文标识符协议和报文数据协议。

表1 报文标识符协议

表2 报文数据协议
CAN通信软件由初始化模块、数据请求和数据接收3个部分组成,初始化模块配置MSCAN控制器初始信息,设置波特率为250 kb/s,设置CAN控制器为一般运行模式、使用总线时钟源。芯片定时器每隔100 ms产生定时中断,仪表盘向电池设备发出数据请求。仪表盘CAN总线接收到报文数据,读取标志位和数据信息,根据接收数据控制仪表盘行为。软件控制流程如图5所示。

图5 电池信息通信流程图
4 结束语
采用MC9S12HY64作为处理器设计一款电动汽车仪表盘,实现了更为简洁的软硬件结构。该仪表盘根据芯片特性和应用要点,实现了芯片控制、数字显示、步进电机控制等功能,并且通过CAN总线实现数据通信。经过实验验证该仪表盘能够接收和处理各种控制信号,运行稳定,功能可靠,控制精度更为准确,具有实用价值。
参考文献:
[1] SMITH M.Batteries versus biomass as a transport solution.Nature.2009,457(7231):785.
[2] 杨忠敏.汽车仪表的发展现状.汽车电器,2004(4):1-3.
[3] Freescale semiconductor.MC9S12HY64 Reference Manual Covers MC9S12HY/HAFamily[EB/OL] .[2013-10-11] .http://www.freescale.com/files/microcontrollers/doc/ref_manual/MC9S12HY64-RMV1.pdf.
[4] 赵福堂.汽车电器与电子设备.北京:北京理工大学出版社,2005.
[5] 孙同景.Freescale9S12十六位单片机原理及嵌入式开发技术.北京:机械工业出版社,2008.
[6] 饶运涛,邹继军,郑勇芸.现场总线CAN原理与应用技术.北京:北京航空航天大学出版社,2003.
[7] 杨建军.CAN总线技术在汽车中的应用.上海汽车,2007(6):32-35.
[8] 欧阳琰,王贵槐,陈先桥,等.基于CAN总线的汽车仪表盘电控单元设计.武汉理工大学学报,2007,31(9):78-81.
猜你喜欢
汽车电器(2022年9期)2022-11-07
名车志(2021年3期)2021-03-18
铁道通信信号(2020年4期)2020-09-21
计算机与网络(2020年7期)2020-05-15
中国外汇(2019年11期)2019-08-27
电子制作(2018年11期)2018-08-04
汽车维护与修理(2016年10期)2016-07-10
铁道通信信号(2016年8期)2016-06-01
空间控制技术与应用(2015年2期)2015-06-05
舰船科学技术(2015年8期)2015-02-27
