
全导式多弹头分导子系统初始对准算法研究
2014-03-25 06:24:48梅春波秦永元游金川
西北工业大学学报 2014年4期
梅春波, 秦永元, 游金川
(西北工业大学 自动化学院, 陕西 西安 710072)
多弹头分导系统不仅可以增加攻击目标的数量,而且可以有效提高导弹的突防能力,并在很大程度上提高导弹的效费比[1]。根据分导子弹头是否具有制导功能可以分为2类:1类子弹头无制导,对这类系统需要对子弹头的分导方法、目标打击顺序等进行优化[1-2];另1类也被称为全导式多弹头分导系统,母弹和子弹均有制导、能机动[3]。本文以第2类分导子弹头制导系统的初始对准为研究对象。
对配置MEMS IMU/GPS组合系统的子弹头,需要在较短时间内完成系统的初始对准,获取弹体的水平和方位信息,施加控制指令将弹体拉平进入机动飞行阶段。由于该对准的直接目的是要辅助控制系统将子弹头拉平,避免坠地,以某型分导系统为例,水平对准精度要求在1°以内(3σ),方位对准精度要求在3°以内(3σ)。
IMU/GPS组合系统运动中对准算法可以分为2类:1类是基于非线性滤波的方法,如UKF[4]、H∞[5]、PF[6]等;另1类是间接解析对准算法[7-8]。第1类方法计算量大且存在滤波稳定性问题;第2类对准方法则算法简单、计算量小,且稳定性可从理论上得到保证,更适宜工程应用。
文本的对准算法利用MEMS陀螺仪输出跟踪弹体系在惯性空间内姿态变化;利用GPS位置输出解析求解导航系相对于惯性空间的姿态变化;依据分导子弹头实际的机动限制,设计了2级减速机动方案,采用最小均方误差意义下的最优Quest算法计算对准开始时刻弹体的姿态,进而完成整个对准过程。同时对该算法的性能进行了详细的理论分析和仿真验证。
1 对准算法描述
对准算法所涉及坐标系包括:
弹体坐标系(b系),原点位于弹体重心,定义为前-上-右坐标系;
弹体惯性系(ib系),定义为惯性坐标系,且与对准开始时刻的弹体系重合;
导航坐标系(n系),原点位于弹体重心,定义为北-天-东坐标系;
导航惯性系(in系),定义为惯性坐标系,且与对准开始时刻的导航系重合;
地心地固坐标系(e系),原点位于地心,z轴沿地球自转轴方向,x轴在赤道面内指向零度子午线,y轴与x轴、z轴构成右手正交坐标系;
地心惯性坐标系(e0系),定义为惯性坐标系,且与对准开始时刻的地心地固坐标系重合。
(1)

(2)
式中:L0、λ0为对准开始时刻弹体重心经纬度;Lt、λt为对准开始后t时刻弹体重心经纬度。对准算法完整描述如图1所示。
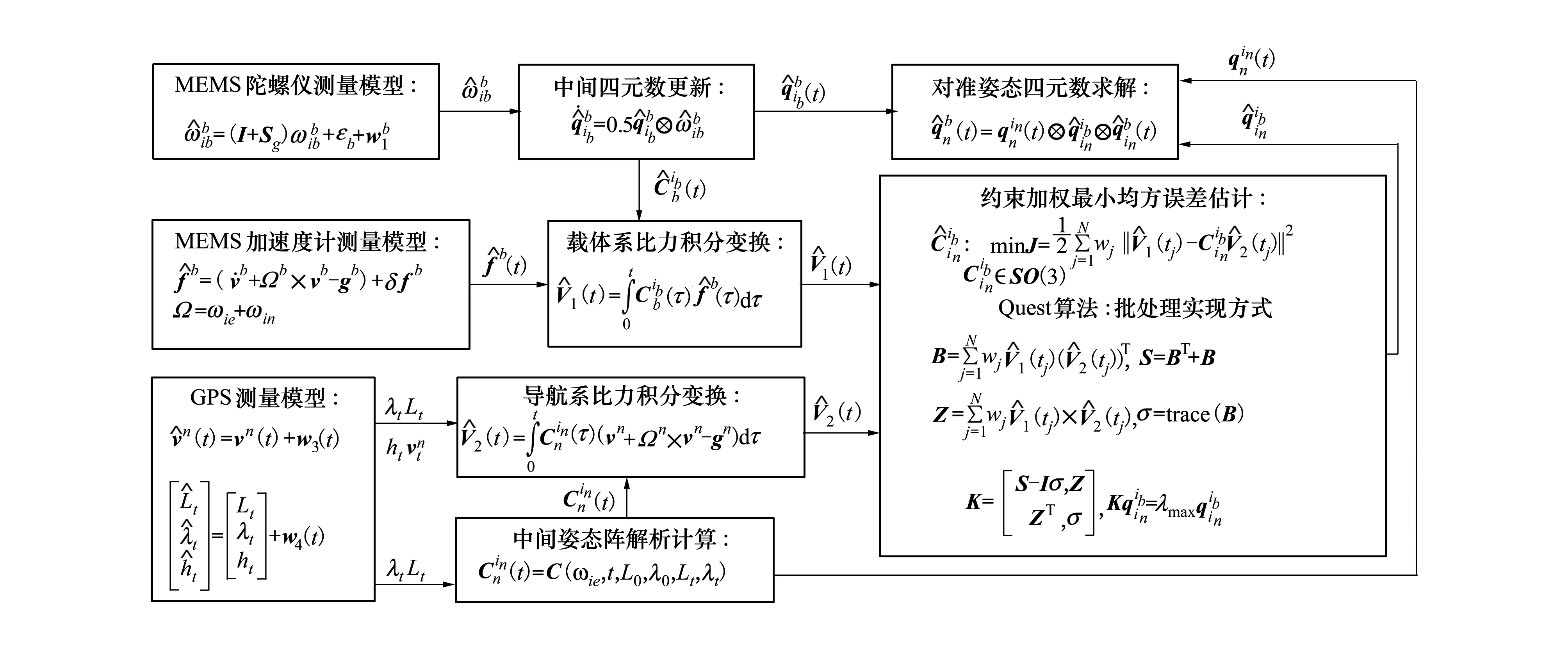
图1 对准算法示意图
2 对准算法精度分析
(3)

(4)

经解旋稳定后的弹体角运动可分为2类:1类是绕弹体纵轴的低速自旋角速度,约为10°/s大小;第2类是在风阻和减速装置的共同作用下,弹体周期性的摆动。考虑到S可视为常值项,因此周期性摆动不会引起较大的累积误差;但是绕弹体纵轴的低速自旋角运动,则会在刻度系数误差作用下,等效引入一个纵轴方向的陀螺常值零偏。
(5)
且定义GPS纬度测量误差为ΔL,经度测量误差为δλ,对准开始时刻纬度为L0,则由(2)式易得φ2为

(6)
(7)
1) 矢量积分误差分析
依据图1中两矢量各自积分式及MEMS加速度计和GPS速度测量模型,则不难得到两矢量各自计算误差为
(8)
δV2(t)≈w3(t)-w3(0)
(9)
式中:δfb为加速度计测量误差,包括加计随机常值零偏、刻度系数误差与比力共同作用引起的等效零偏以及测量噪声项;w3(t)为GPS速度量测噪声,建模为零均值白噪声。
(8)式的积分结果可近似为时间的一次函数,斜率为加计的等效常值零偏;(9)式中误差项亦为白噪声,均值为-w3(0)。
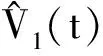
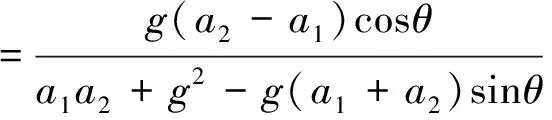
图2 定姿矢量对等效角误差示意图
解旋稳定后弹体会在减速装置作用下减速下落,因此对准过程中,比力模值大于重力加速度值,等效角误差δθ1(t)、δθ2(t)可近似描述为
(10)
式中:α为大于1的常数;为由加计等效零偏决定的常值误差参数;g为重力加速度值;r为有界随机量,其上界由GPS速度测量噪声方差决定。
由(10)式可设定图1中不同时刻矢量对的权重系数,如取wi与时间ti成正比。
2) 基于矢量观测的定姿算法误差分析
图1中最小均方误差估计问题可等价描述为
(11)
式中
(12)
(11)式问题的估计精度取决于2方面的因素[9]:①δM1、δM2的大小及其统计特性,这一点由所选器件的精度参数决定,如(8)式、(9)式、(12)式所示;②M2矩阵的结构特性。
(13)

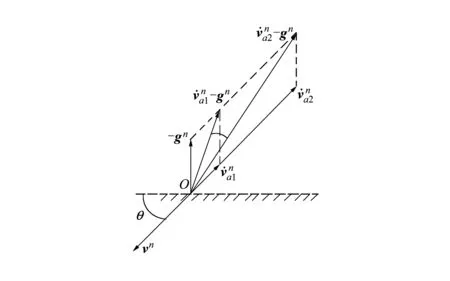
图3 2级减速作用示意图
(14)
3 蒙特卡罗仿真分析
对准过程中,弹体俯仰角θ、方位角ψ及滚转角γ变化规律设置如下:
式中:摆动角运动初值:ψ0=30°、γ0=20°;弹体周期摆动频率:f1=0.6、f2=0.8(Hz);周期摆动初相位:a=π/3、b=π/5;摆动角运动幅度:θA=15°、ψA=15°;自旋角速度:ω=10°/s;俯仰角初值θ0在仿真中说明。
对准过程中,假定存在2级减速,速度初值:v0=500 m/s
第1级减速阶段加速度模值变化规律如下
a1(t)=50exp(-0.070 6t)
第2级减速阶段加速度模值变化规律如下:
a2(t)=10exp(-0.085 2t)
对准开始时刻弹体位置:
纬度 40°,经度 120°,高度 8 000 m
所有仿真中对准总时长为20 s;MEMS器件采样周期为0.01 s;GPS更新周期为1 s;其他参数在下文仿真中具体给出。
3.1 MEMS陀螺仪误差对求解精度影响仿真结果
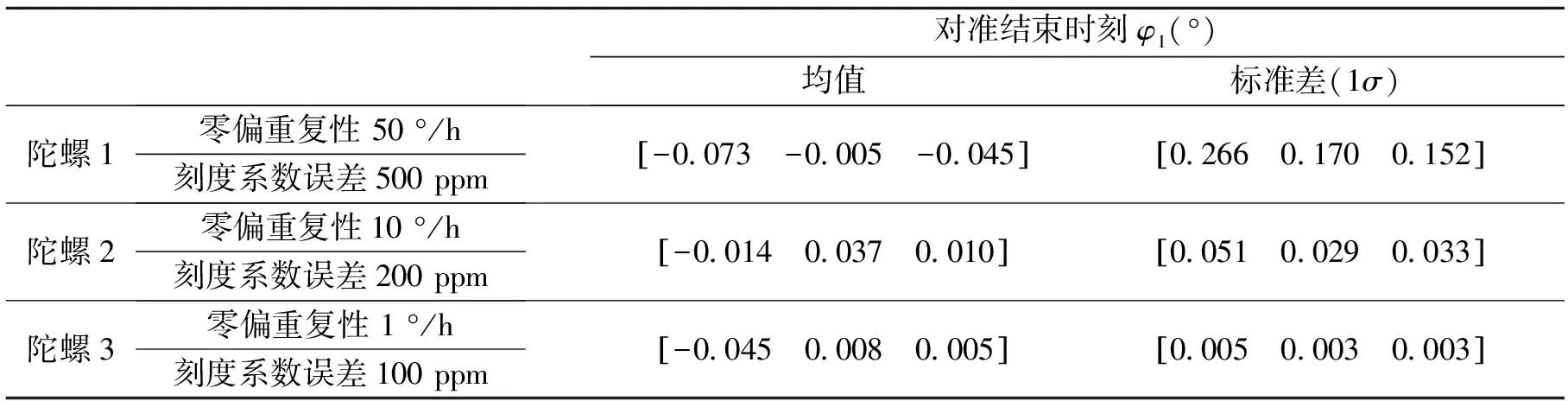
表1 φ1受陀螺仪精度影响仿真结果
3.2 MEMS加速度计误差对求解精度影响结果

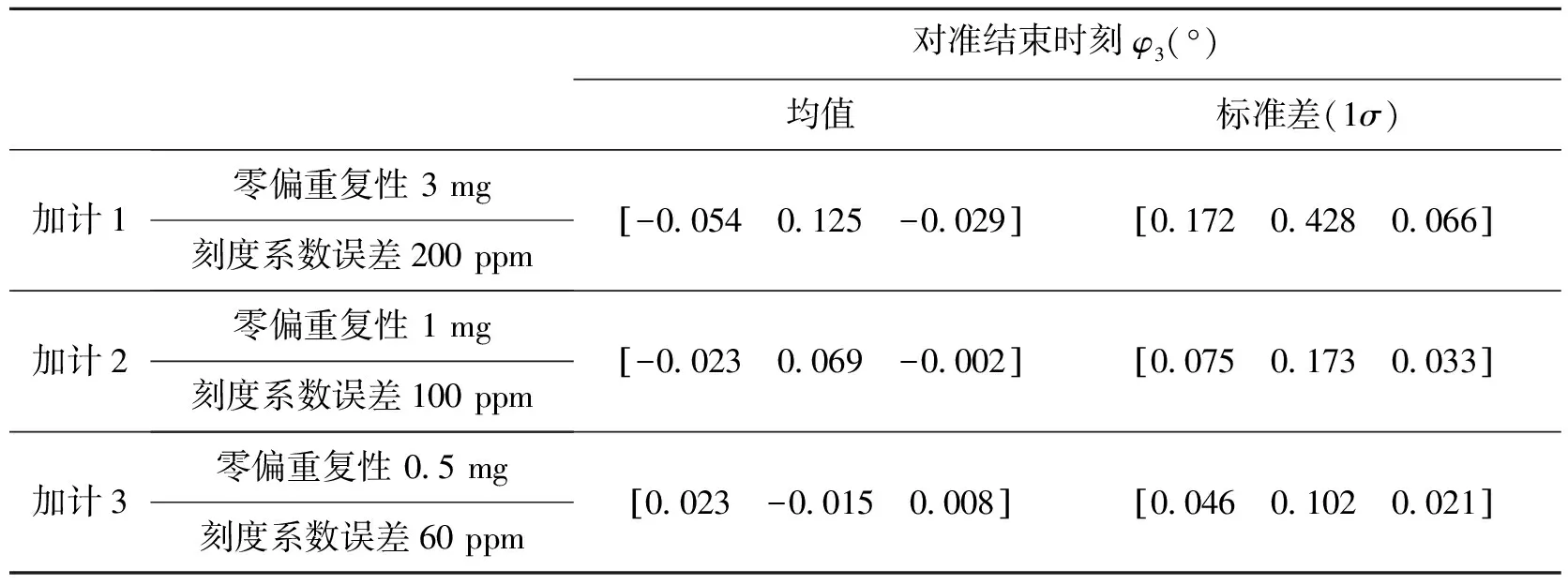
表2 φ3受陀螺仪精度影响仿真结果
3.3 GPS速度测量误差对求解精度影响仿真结果
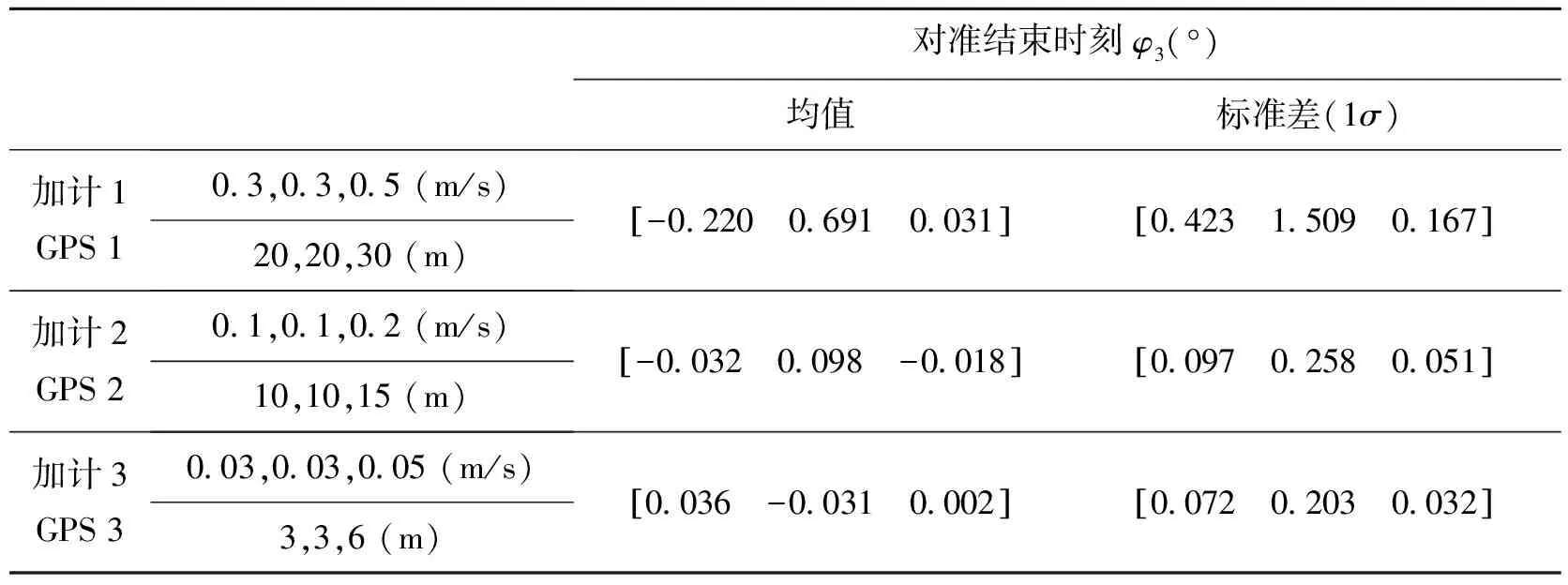
表3 φ3受GPS精度影响仿真结果
3.4 对准开始时刻俯仰角初值θ对求解精度影响仿真结果
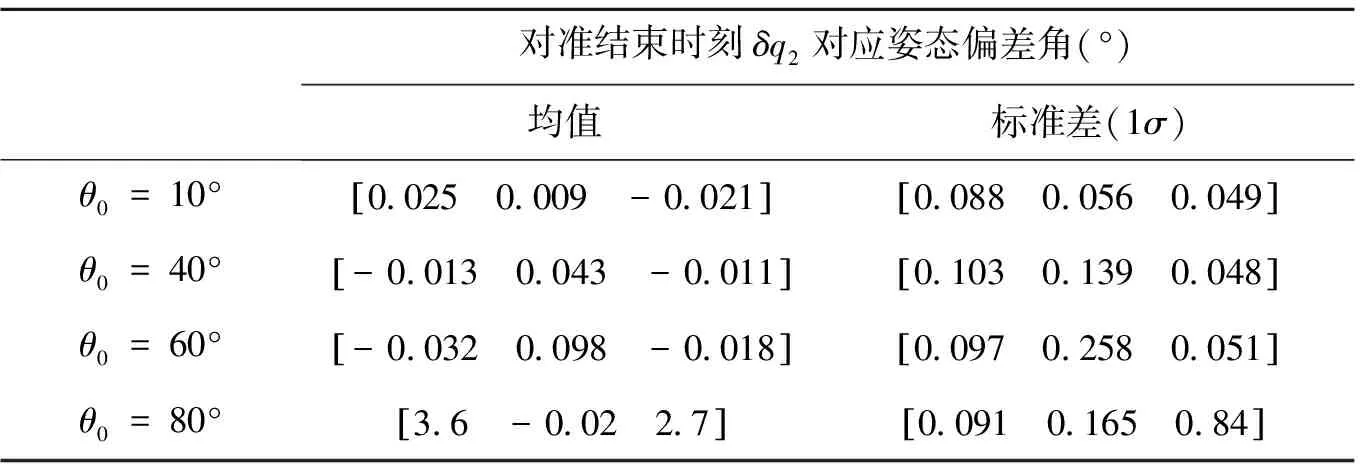
表4 对准开始时刻俯仰角初值对φ3影响仿真结果
3.5 对准算法整体性能仿真结果
采用表1中2号陀螺、表2中2号加计、表3中2号GPS进行组合,俯仰角初值设定为60°,得到对准结果如图4所示。
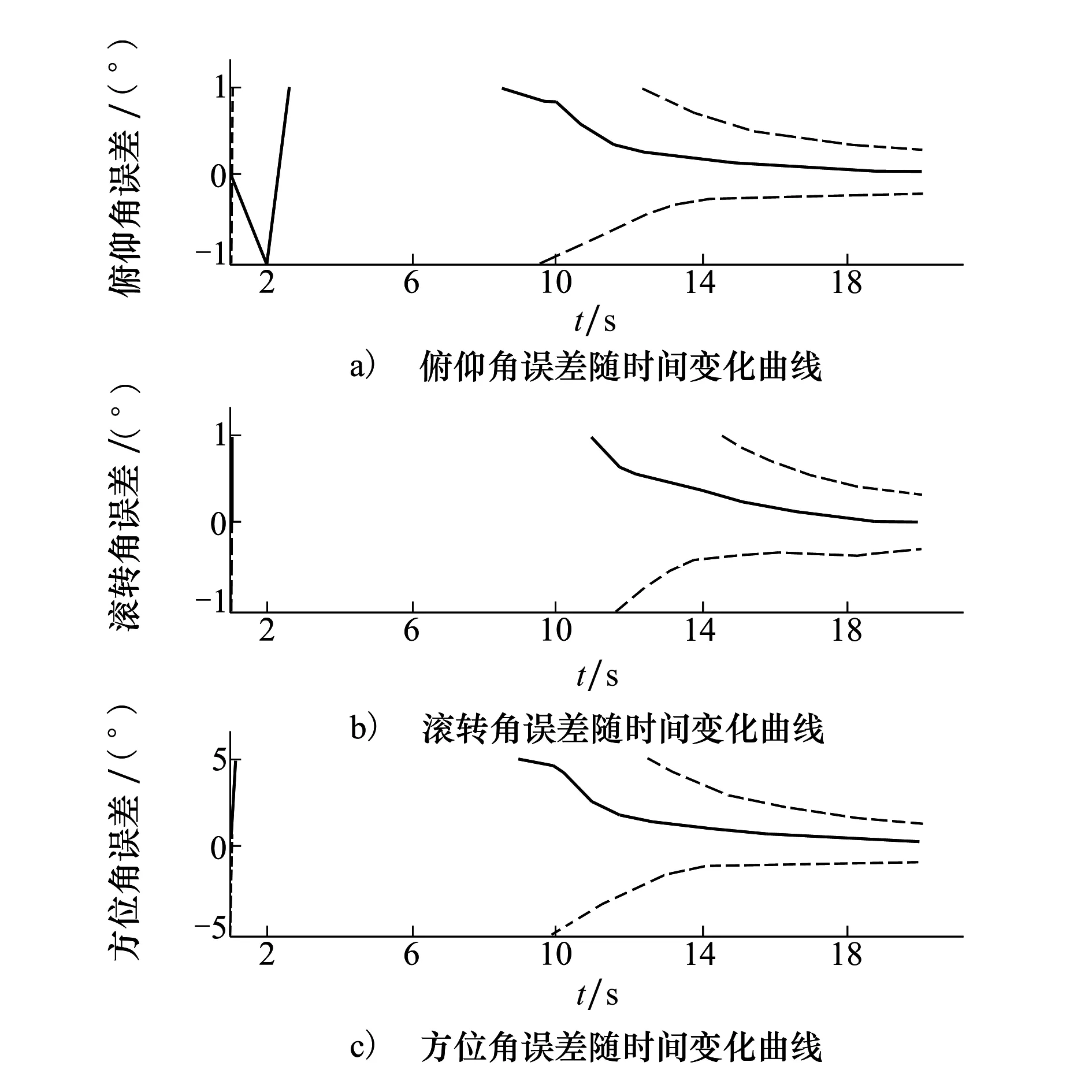
图4 对准算法仿真结果
3.6 仿真结果分析
表1~表4及图4中所用到的均值和标准差均由相应的100次蒙特卡罗仿真结果计算得到。
表1~表3结果表明,MEMS IMU和GPS的器件精度是影响对准精度的一个主要原因,仿真结果与理论分析一致,器件精度越高,相应的解算误差越小。选择器件时,需要综合考虑成本和指标要求。
表4结果表明,对准开始时刻俯仰角值是影响对准精度的另一个原因。俯仰角越接近-90°,对准效果越差。事实上,当俯仰角等于-90°时,滚转角和方位角无法分离。因此,从提高对准精度角度出发,子弹在抛撒过程中需要避开这个奇异点。
图4示出了完整对准算法仿真的收敛过程,在对准结束时刻,俯仰角误差均值为0.03°,3倍标准差为0.24°;滚转角误差均值为0.01°,3倍标准差为0.32°;方位角误差均值为0.27°,3倍标准差为1.13°,完全满足初始对准指标要求。也即表明,当俯仰角不大于-60°时,通过选择合适的MEMS IMU/GPS组合系统,设计合理的减速机动即可实现多弹头分导系统子弹头的快速初始对准。
4 结 论
全导式分导系统的子弹头在抛出后近似处于自由落体状态,子弹头制导系统中加速度计组合感测的比力很小。理论分析表明,要实现满足精度要求的快速对准,必须通过辅助措施改变对准过程中子弹头的比力方向,且方向改变越大,对对准越有利。文中设计了一种2级减速方案,通过改变减速装置来得到不同模值的负向加速度,进而实现改变子弹头的比力方向,在实际工程中也较易实现,仿真结果也表明了这种机动方式的有效性。
参考文献:
[1] 谭守林,张大巧,滕和平,等. 基于目标打击顺序的多弹头导弹分导方法[J]. 弹道学报,2006,18(4):89-92
Tan Shoulin, Zhang Daqiao, Teng Heping, et al. Research on Separation Sequence of MIRV Missile Based on Target Attacking Sequence[J]. Journal of Ballistics, 2006,18(4): 89-92 (in Chinese)
[2] 谭守林,张大巧,于志军. 分导式多弹头导弹子弹头分导顺序优化与评估[J]. 弹道学报,2006,18(3):29-33
Tan Shoulin, Zhang Daqiao, Yu Zhijun. The Optimization and Evaluation of the Warhead Separation Sequency of Multiple Independent Reentry Vehicle Missile[J]. Journal of Ballistics, 2006,18(4):29-33 (in Chinese)
[3] 凌德海. 全导式多弹头分导制导的研究[J]. 国防科技大学学报,1980,4:107-132
Ling Dehai. Study about Guidance for Genuine MIRV[J]. Journal of National University of Defence Technology, 1980,4:107-132 (in Chinese)
[4] Kim K, Park C G. Non-Symmetric Unscented Transformation with Application to in Flight Alignment[J]. International Journal of Control, Automation, and Systems, 2010,8(4):776-781
[5] Sam M S, Fang J C. Navigation and Self Alignment of Inertial Systems Using NonlinearH∞Filters[J]. World Academy of Science, Engineering and Technology, 2011,59:692-697
[6] Mao B, Wu J T. An Adaptive Particle Filter for MEMS Based SINS Nonlinear Initial Alignment [C]∥Proceedings of the 2010 IEEE International Conference on Information and Automation, Harbin, China, 2010
[7] 秦永元,严恭敏,顾冬晴,等. 摇摆基座上基于信息的捷联惯导粗对准研究[J]. 西北工业大学学报,2005,23(5):681-684
Qin Yongyuan, Yan Gongmin, Gu Dongqin, et al. A Clever Way of SINS Coarse Alignment Despite Rocking Ship[J]. Journal of Northwestern Polytechnical University, 2005, 23(5): 681-684 (in Chinese)
[8] Wu Y X, Pan X F. Velocity/Position Integration Formula Part Ⅰ: Application to In-Flight Coarse-Alignment[J]. IEEE Trans on Aerospace and Electronic Systems, 2013, 49(3):1006-1023
[9] 秦永元,梅春波,白亮. 捷联惯性系粗对准误差及数值问题分析[J]. 中国惯性技术学报,2010, 18(6):331-335
Qin Yongyuan, Mei Chunbo, Bai Liang. Error and Calculation Problem Analysis of Coarse Alignment Method with Inertial Frame for SINS[J]. Journal of Chinese Inertial Technology, 2010, 18(6): 331-335 (in Chinese)
猜你喜欢
铁军·少年国防(2023年12期)2023-02-23 11:45:09
兵器装备工程学报(2022年7期)2022-08-10 03:37:18
爆炸与冲击(2022年2期)2022-03-17 07:28:44
军事文摘(2020年24期)2020-02-06 05:56:58
作文评点报·初中版(2019年29期)2019-10-11 04:57:58
当代陕西(2018年12期)2018-08-04 05:49:20
上海煤气(2018年6期)2018-03-07 01:03:22
中国惯性技术学报(2017年1期)2017-06-09 08:15:14
探测与控制学报(2015年4期)2015-12-15 15:01:00
郑州大学学报(理学版)(2014年4期)2014-03-01 04:21:15
