
变论域模糊PID在汽包水位控制中的研究
2014-03-08 06:41牛昱光阎高伟贾峰生
自动化与仪表 2014年7期
万 胜,牛昱光,阎高伟,贾峰生
(1.太原理工大学 信息工程学院,太原 030024;2.山西省电力科学研究院,太原 030024)
汽包水位是锅炉在运行过程中需要实时监视和精确控制的重要参数,一个电厂所设计的自控系统对锅炉汽包水位控制效果的好坏,直接影响到锅炉的蒸汽产量和品质,以及生产设备的安全。所以,提高锅炉汽包水位自动控制性能,对保证锅炉安全生产运行有着十分重要的意义。目前,在大型锅炉汽包水位控制中,针对传统单冲量控制不能克服“虚假水位”和双冲量控制不能及时反映给水侧扰动的缺点,多采用前馈-串级三冲量控制方案。在控制器方面,传统的PID算法是工程实际中应用最为广泛的调节器算法之一,但它具有对被控对象模型依赖性强、参数难以整定的缺点。对此,很多学者引入了模糊控制的概念,提出了模糊PID算法,这种算法具有响应快、超调量小、控制精度高、系统适应性强等优点,明显优于传统PID控制[1]。近年来,控制品质更好的变论域模糊PID控制算法在理论上也取得了很大成果,但由于变论域模糊PID在模型建立和参数调整上较为复杂,在面对像锅炉汽包水位这种具有大延迟、大惯性且有着复杂物理过程的控制对象时,很难在实际应用中发挥作用。
本文结合同煤大唐热电二期工程的一台330 MW循环流化床机组锅炉汽包水位控制系统的实际情况,在已有控制方案基础上设计出了简化的变论域模糊PID控制器,并对其进行了仿真试验和分析调试,继而,在该机组投AGC期间,将本文设计的控制器实际应用于汽包水位控制中,并在DCS平台上进行了定值扰动和负荷扰动的试验,取得了令人满意的控制效果。
1 变论域模糊PID控制器的研究与设计
1.1 模糊PID控制器
模糊PID是根据偏差e和偏差变化率ec,通过事先制定的模糊规则不断在线自动调整PID参数,目的是为了获得在不同工况下的最佳PID参数,以便获取更好的控制效果。基本工作原理是:首先确定PID控制器的3个参数与偏差e和偏差变化率ec之间的模糊关系,制定模糊规则,然后不断检测e和ec,把经模糊推理得到的参数修正量ΔKP,ΔKI,ΔKD分别与 PID 参数的初始值 KP0,KI0,KD0进行叠加,得到新的PID参数[2],此时的模糊控制作用是为了获取更佳的PID参数,是为PID控制服务的。
1.2 变论域模糊PID控制器
因为模糊PID控制器的量化因子和比例因子是固定不变的,不会根据偏差e和偏差的变化率ec来自我调整,导致它的控制效果不能完全发挥出来。而变论域模糊PID控制器就是根据偏差e和偏差的变化率ec来实时调整量化因子和比例因子以对基本论域进行伸缩,来获得更好的控制效果。图1为变论域模糊PID控制器原理图。

图1 变论域模糊PID控制器原理图Fig.1 Schematic diagram of a fuzzy PID controller based on variable universe
图1 所示的变论域模糊PID与模糊PID的最大不同是在对变量进行模糊推理前和解模糊化后加入了伸缩因子,实时对输入输出论域进行伸缩,以获得更好的系统输出值。但对于伸缩因子的建模较为复杂,特别是输入论域的伸缩因子,它往往跟偏差e和偏差的变化率ec有着复杂的函数关系,难以在实际应用中实现。
本文为了在锅炉汽包水位控制中应用变论域模糊PID控制器,设计了简化的变论域模糊PID控制器,不对输入论域进行伸缩处理,即令图1中的伸缩因子 α(e)=1,α(ec)=1。只对输出论域进行伸缩处理,因为最终目的仍是要得到模糊控制的输出,即 PID 参数的修正量 ΔKP,ΔKI,ΔKD。本文选择基于函数模型的伸缩因子[3],对于输出论域的伸缩因子,选取原则是:伸缩因子βP应具有与偏差的单调一致性,而伸缩因子βI应具有与偏差的单调相反性。为此,选出的伸缩因子为:βP= 2e ,βI=1/(e+0.7)。在本机组的实际应用中,考虑到汽包水位容易受到蒸汽的扰动,若引入微分作用,会使控制品质变差,所以本文中主控制器采用PI控制器,而不使用微分控制,因此,取 KD0=0,ΔKD=0。
2 系统仿真试验及效果分析
2.1 仿真模型的建立

图2 前馈-串级三冲量控制方案原理图Fig.2 Schematic diagram of feedforward-cascade three elements control scheme
本文采用前馈-串级三冲量控制方案,其原理图如图2所示。汽包水位作为主调节信号,给水流量作为内部扰动信号,蒸汽流量作为前馈信号。其中:GD(s)是汽包水位在蒸汽扰动通道的传递函数;GW(s)是汽包水位在给水扰动通道的传递函数;αD为蒸汽流量变送器转换系数;αW为给水流量变送器转换系数;αH为测量汽包水位差压变送器转换系数。
2.2 主、副控制器的模型建立
主控制器是上文中所设计的简化的变论域模糊PID控制器,该控制器中的模糊控制是一个两输入两输出的控制器,选取两输入量(偏差e与偏差变化率ec)和两输出量(ΔKP与ΔKI)的模糊论域均为:{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6}, 模糊子集为:{NB,NM,NS,ZO,PS,PM,PB}。 在本机组锅炉的模型中,用试凑法经过反复调整后,得到主控制器的PID初始参数:KP0=2,KI0=0.01。副控制器采用P控制,K1=1.2。经过计算和调整,取量化因子Ke=6,Kec=40,比例因子KP1=0.5,KI1=0.5。根据模糊控制的基本原理及实际汽包水位控制的经验,模糊决策采用Mamdani型推理算法,解模糊采用Centroid法,选定的模糊规则如表1和表2所示。
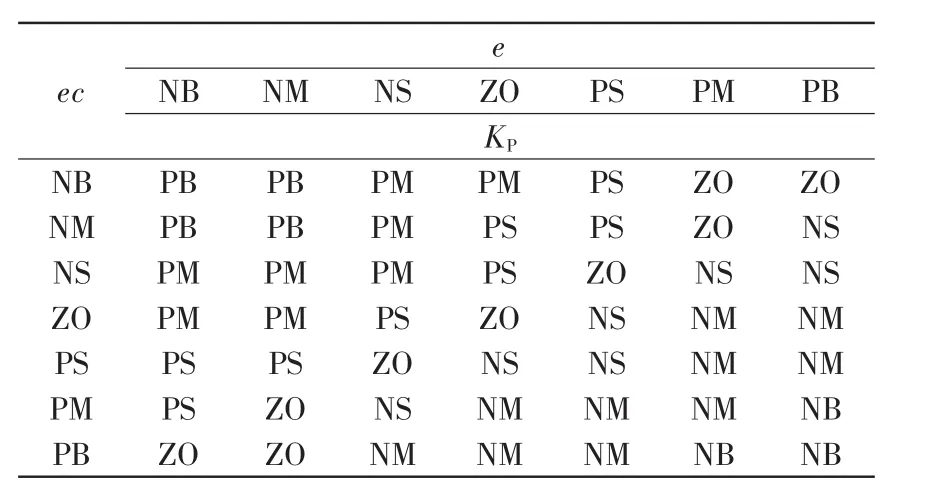
表1 Kp模糊规则Tab.1 Fuzzy rules of Kp

表2 KI模糊规则Tab.2 Fuzzy rules of KI
2.3 参数的计算和传递函数的确立
本文研究的330 MW循环流化床机组锅炉在额定负荷时的供汽流量为1050 t/h,选用的给水流量和蒸汽流量量程为0~1300 t/h,汽包水位的显示量程为-400 mm~400 mm,变送器的标准信号为4~20 mA信号。由计算可得各转换系数为

调节阀采用线性阀,其增益系数为

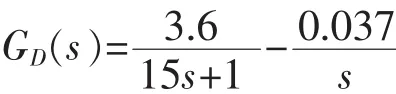
根据文献[4-5],并结合本文应用的锅炉技术参数,确定汽包水位在给水流量扰动下的传递函数为
汽包水位在蒸汽流量扰动下的传递函数为
2.4 仿真效果及分析
为能对比变论域模糊PID与模糊PID及传统PID的控制品质,在Matlab软件的Simulink中搭建了3种控制算法的汽包水位控制系统仿真模型进行仿真。在仿真试验中,设定值阶跃为0.3(即对应15 mm水柱的水位设定值扰动),在600 s时加入5%的蒸汽流量扰动 (即对应50 t/h的蒸汽负荷扰动)。图3为仿真试验响应曲线。

图3 汽包水位控制系统仿真曲线Fig.3 Simulation curve of drum level control system
从图3可以得出:简化的变论域模糊PID在超调量上要明显小于传统PID和模糊PID;在响应时间上很明显优于传统PID;特别是在600 s加入蒸汽扰动(即负荷扰动)后,能快速响应并收敛到稳定状态,在超调量、响应时间、控制精度等控制性能指标上明显好于模糊PID和传统PID。
总的来说,本文设计的变论域模糊PID控制器经过简化处理后,模型变得简单,易于实现,并且在各项控制性能上仍然优于模糊PID控制器和传统PID控制器。
3 系统应用试验及结果分析
经过上文的仿真试验,理论上验证了简化的变论域模糊PID控制器相对于模糊PID控制器和传统PID控制器具有良好的抗扰动能力和控制效果。将其应用于实际锅炉汽包水位的控制中,在机组并网投入AGC期间,进行定值扰动和负荷扰动试验,以验证该控制器在实际应用中的稳定性和抗扰动能力。该机组的额定功率为330 MW,对应的蒸汽流量为1050 t/h,汽包水位正常显示范围是0 mm±50 mm。
3.1 定值扰动实验
在机组投入AGC期间,当机组的实发功率基本处于330 MW额定功率的稳定状态时,蒸汽流量稳定在1050 t/h,此时做汽包水位的定值扰动实验。在18min时将汽包水位的设定值由0mm调整为20mm,汽包水位的响应曲线如图4所示。
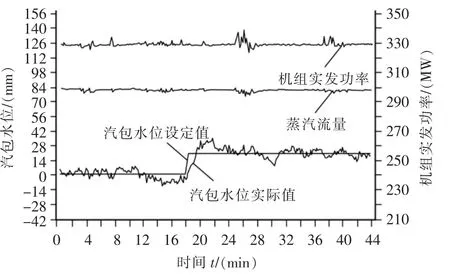
图4 定值扰动时汽包水位的响应曲线Fig.4 Response curves of drum level when constant value disturbance
由图4响应曲线可见,在经过6 min的响应时间后,汽包水位稳定在20 mm左右。期间,汽包水位在定值扰动发生3 min之后达到了最高值32 mm,出现的最大偏差为12 mm,水位偏差处于正常范围内。相对于模糊PID控制和传统PID控制,系统的响应时间和超调量要小得多。
3.2 负荷扰动实验
在试验期间,汽包水位设定值一直保持在-5 mm,机组始终投入AGC,机组的实发功率由330 MW降为300 MW,再降为270 MW,变化速率为4 MW/min,蒸汽流量也从1050 t/h降为958 t/h,再降为862 t/h。随后又做了升降负荷试验。在此过程中的汽包水位响应曲线如图5所示。
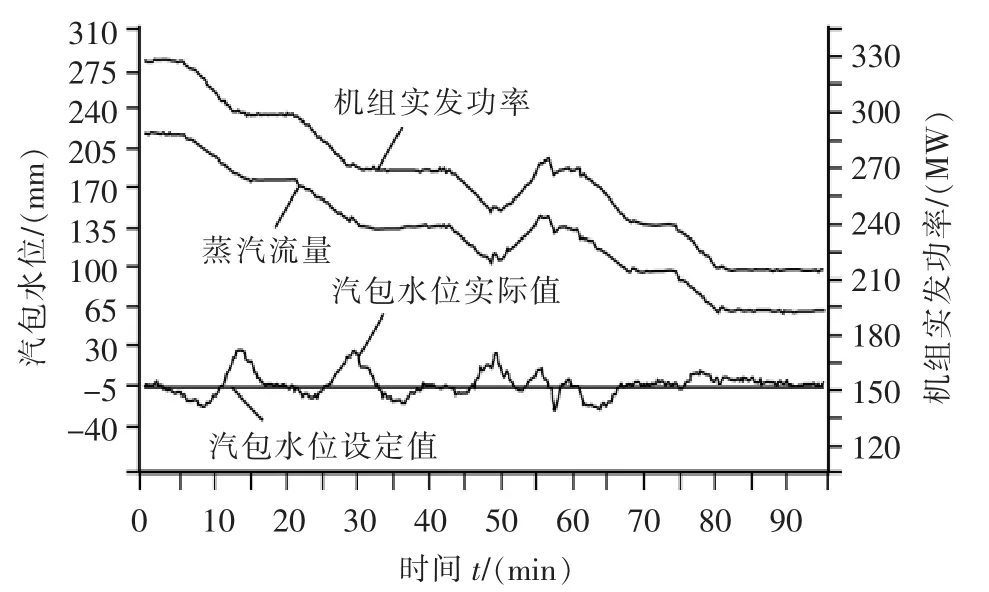
图5 负荷扰动时汽包水位的响应曲线Fig.5 Response curves of drum level when load disturbance
由图5响应曲线可见,在连续大幅度升降负荷期间,汽包水位实际值始终在设定值附近波动,最后稳定在-5 mm左右。期间,汽包水位最高值为28 mm,最低值为-25 mm,出现的最大偏差为33 mm,满足汽包水位的控制要求。并且在面对连续10%的大负荷扰动时,汽包水位的响应时间只有7 min左右。结果表明,相对于模糊PID控制和传统PID控制,系统具有良好的自平衡和抗负荷扰动能力。
4 结语
本文从仿真和实际应用的角度,验证了在锅炉汽包水位控制系统中,简化的变论域模糊PID控制器比模糊PID控制器和传统PID控制器具有更良好的控制品质和抗扰动能力。特别是在面对大速率升降负荷时,简化的变论域模糊PID控制器表现出了更强的负荷适应性和自平衡能力。
[1] 张儒.火电厂锅炉汽包水位的智能控制研究[D].乌鲁木齐:新疆大学,2011.
[2] 陈平.锅炉汽包水位模糊PID控制研究[D].厦门:华侨大学,2006.
[3] 朱岩,郭军平.变论域自适应模糊PID方法的研究与仿真[J].空军工程大学学报:自然科学版,2005,6(5):11-13,32.
[4] 刘春艳,刘文军.基于模糊神经网络PID的锅炉汽包水位控制[J].热力发电,2011,40(8):34-37,44.
[5] 张益农,萧德云.CFB锅炉汽包水位自校正PID模糊控制研究[J].计算机应用与软件,2004,21(12):34-36,62.■
猜你喜欢
机械管理开发(2022年1期)2022-03-24
计算机仿真(2022年2期)2022-03-15
北京航空航天大学学报(2021年7期)2021-08-13
哈尔滨工程大学学报(2021年7期)2021-07-13
成都信息工程大学学报(2021年6期)2021-02-12
发电设备(2020年5期)2020-10-09
中国惯性技术学报(2019年3期)2019-10-15
计算机与数字工程(2019年8期)2019-09-03
自动化学报(2019年6期)2019-07-23
中国惯性技术学报(2019年6期)2019-03-04
