
柔性制造单元中机器人行走系统的实验模态分析
2014-02-28 06:26张鹏飞张伯俊
天津职业技术师范大学学报 2014年3期
张鹏飞,张伯俊
(天津职业技术师范大学机械工程学院,天津 300222)
柔性制造单元中机器人行走系统的实验模态分析
张鹏飞,张伯俊
(天津职业技术师范大学机械工程学院,天津 300222)
介绍了柔性制造单元中机器人行走系统的结构设计。通过机械结构动态设计的主要途径——实验模态分析法(EMA)对设计结果进行了研究,并结合有限元模态分析法(FEM)对2种分析结果进行了比较。通过实验模态分析以及对比结果,能够有效地识别出行走系统的薄弱部位,为行走系统的优化设计和动态性能的提高奠定了理论基础。
柔性制造单元;机器人行走系统;实验模态分析
柔性制造单元是将工业机器人安装在行走运输底座上,可以使得工业机器人同时具有移动和操作的功能,从而实现物料在各个生产设备单元之间的搬运、存储和交换。目前,柔性制造单元已经在工业生产过程中广泛应用,例如德国Honsberg公司的柔性制造生产线中使用了大型龙门式工业机械手,瑞典沃尔沃(Valov)公司使用了工业机械手环形磨轮装置,我国沈阳市第一水泵厂使用泵体全自动加工生产线,中国重汽集团济南桥箱有限公司使用转向节和转速器壳体2条全自动生产线等。模态分析法作为研究此类机械结构动态性能、验证其设计合理性的最快速、高效的一类方法,也得到了广泛的应用和发展。其中实验模态分析法可以模拟机械结构在实际工作状态下所经受的振动,通过测试振动响应数据,得出更加符合实际情况和边界条件的测试结果,同时也可以验证有限元分析的合理性。目前,国内南京航空航天大学振动工程研究所、中国振动协会都在致力于研究实验模态分析、工作模态参数识别的相关工作。本文以某公司研制的用于柔性制造车间物流运输单元的机器人行走系统为例,通过有限元法和实验法对系统进行模态分析,并将分析结果和有限元分析结果进行比较[1-2],从而对机器人行走系统的动态性能研究和优化设计提供技术支持。
1 实验法模态分析
本文中行走系统的工作对象为安川ES165D工业机器人。图1为机器人行走系统的三维模型,图中显示机器人行走导轨由多段铸铁底座拼装而成,分布多个支撑点,采用滚珠直线导轨作为运动导轨。而机器人行走系统主要由驱动系统、工作台、运输底座、滑块、导轨、直线运动及定位检测机构等共同组成。

图1 ES165D工业机器人行走系统的实体与三维模型
1.1 实验仪器
本次模态分析实验用到的主要仪器和分析系统包括:美国PCB公司力传感器、加速度传感器、模态力锤和LMS Test 9A振动噪声分析测试系统。
1.2 实验方案
本实验模态测试分析系统的组成如图2所示。主要包括激振系统、测量系统和数据分析处理3个部分组成。其中激振主要是通过模态力锤对行走系统的激振点进行敲击来完成的,当机器人行走系统受到锤击时,本身结构会产生振动,同时各加速度传感器可以测得结构的响应。系统的响应信号与输入信号通过传感器经过电荷放大器传送到LMS数据采集分析系统,由数据采集分析系统进行结构特性参数的识别。

图2 实验系统的分析示意图
1.3 激励方式、测试点和激振点的选择
激励装置为美国PCB公司的模态力锤,使用该模态力锤对机器人行走系统进行单个激振点激振、多个测试点采样的方式来进行锤击激励。对于像机床等中小型结构的工程机械,可以看作是一个有无限多个自由度的振动系统,对应的固有频率存在无限多个振型,高阶振型对应的刚度和阻尼值都较大,因此对系统结构动态特性影响较小,并且高频段的特性测量难以得到准确的结果。所以,测试点的布置应尽可能地选择能够激发低阶振型的位置[3-4]。整体上激振点的选择要遵循以下几点:测试点应该布置在结构易发生振动变形的部位,并且该部位能够明确显示试验频段内的所有模态的变形特征,以及各模态振型之间的变形区别;测量点的布置要包含所有关心的结构点;布点时应考虑到测试的可行性,避开不便于传感器安装的测试点。图3为在LMS软件中的Geometry模块中建立的机器人行走系统模态实验测试点布置的模型图。测试位置为各条直线的交点,整个机器人行走系统共布置了38个测试点,其中在机器人上布置了14个测试点,工作台上布置了8个测试点,运输底座布置了16个测试点。

图3 工业机器人行走系统测试点模型图
2 实验数据及分析
选择合适的测试点,可以在LMS Impact Testing模块中分析这些测试点在X、Y、Z 3个方向上的相关函数曲线图,可以发现这些测试点在X方向的相干函数在低频段和高频段受到环境的影响比较明显,而在其余的频段内的相关性都近似为1,这说明了输出信号是由输入信号引起的[5]。将LMS Impact Testing模块中测得的数据导入到Modal Analysis模块中进行模态参数的提取和分析。图4为基于LSCE(最小二乘复数法)的极点稳态图。图中S表示稳定,S点越多稳态性越好。故选取图中S所占比例多的极点,该极点的频率和振型即为结构的频率和振型。
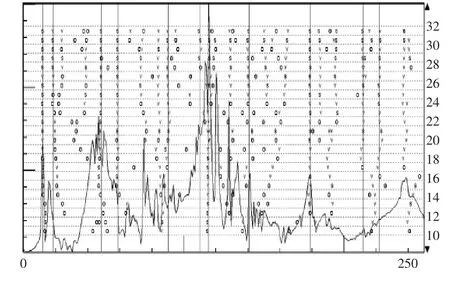
图4 基于LSCE的稳态图
表1为机器人行走系统结构的11阶模态频率及振型描述,在这11阶模态频率中,第3阶频率和第4阶频率、第6阶频率和第7阶频率、第8阶频率和第9阶频率、第10阶频率和第11阶频率,振型基本一致,但振幅略有差别,因此,可以认为是同一阶模态。将有限元模态分析的结果和实验模态分析的结果中频率相差不大且对应的振型大体一致的模态提取出来进行比较,比较结果如表2所示,并以实验模态振型和有限元模态振型等为例进行说明,如图5所示。

表1 各阶实验频率阶振型描述
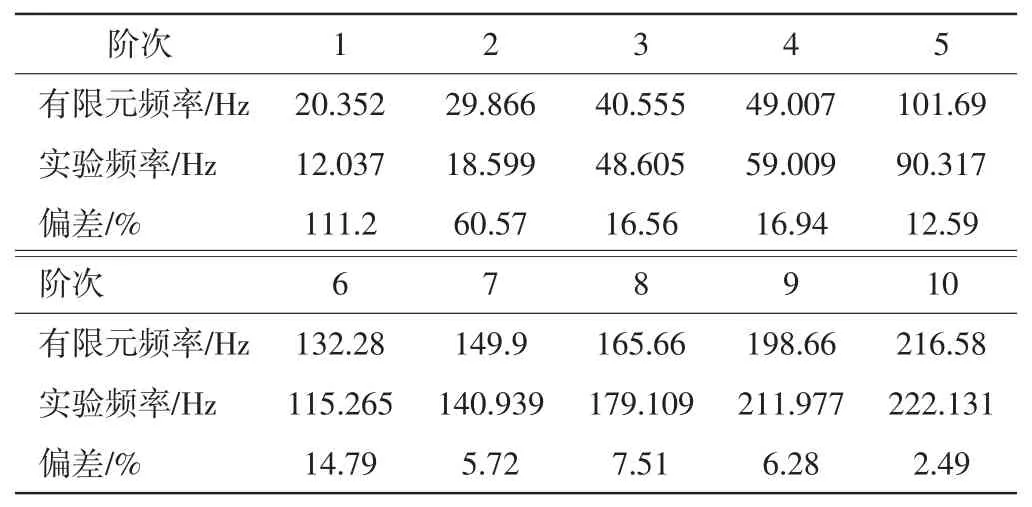
表2 有限元模态分析频率与实验模态分析频率对比表
由表2可以看出,有限元分析与实验分析除第1、2阶频率结果相差较大以外(分别为 111.2%和60.57%),其余各个阶次频率结果的差值均小于20%。并且从第7阶之后,差值已低于10%。前两阶差值较大的原因是在建立机器人行走系统有限元模型时,对机器人各个关节、减速机连接处近似认为是刚性连接,并且对减速机进行简化所造成的。整体来看,前10阶平均差值为25.47%,其中第3阶至第10阶的平均差值仅为10.36%。结合实验模态分析的结果可以看出,相应结构的简化并未影响对整个行走系统刚度的分析。因此,可认为本文建立的机器人行走系统的有限元模型是合理的。
结合机器人行走系统的实验振型图和有限元模态分析振型图可以看出,机器人行走系统具有较高的刚度,从实验振型图和有限元振型图中均可看出,机器人行走系统的运输底座并未发现明显的薄弱部位。整个机器人行走系统的薄弱环节发生在机器人腕部和与手抓相连接的部位,引起这一部位刚度不足的原因是机器人手抓和腕部的结构尺寸相对于整个机器
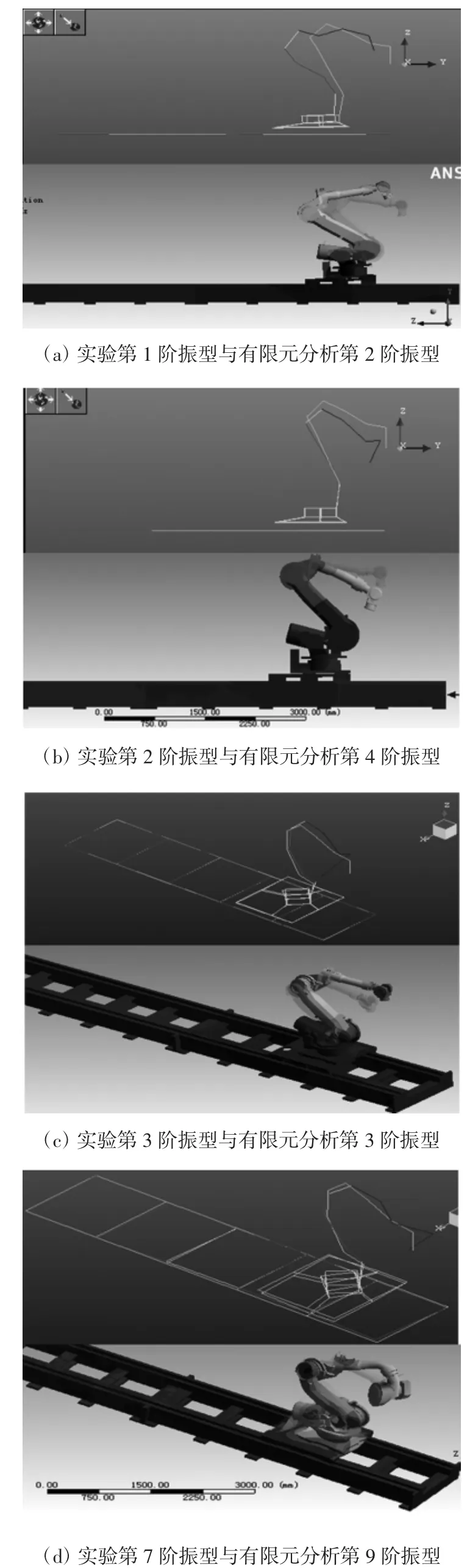
图5 实验模态分析和有限元模态分析振型图的比较
人行走系统其他部件的结构尺寸相对较小。因此,要提高整个机器人行走的刚度,可以通过增大机器人腕部手抓的结构尺寸来实现。
3 结束语
本文介绍了柔性制造单元中机器人行走系统的结构特点,并且利用LMS振动噪声测试分析系统通过锤击法对整个机器人行走系统进行了模态分析实验,得出了机器人行走系统的各阶频率和振型。通过与有限元模态分析结果进行比较,得出由于相应部件的简化,前两阶频率差值百分比较大,但其余差值百分比均小于20%,验证了建立的有限元模型的合理性,找出了机器人行走系统结构的薄弱部位,获得了结构改进及优化的设计依据。
[1] 张力,林建龙,项辉宇.模态分析与实验[M].北京:清华大学出版社,2011:132-133.
[2] VIVO A,BRUTTI C,Leofanti J L.Modal shape identification of large structure exposed to wind excitation by operational modal analysis technique[J].Mechanical Systems and Signal Processing,2013(6):443-447.
[3] 李奎.基于结合面参数的高档数控机床动态特性分析与优化[D].南京:南京理工大学,2007.
[4] 李柳林.机器人样机设计制造及振动测试[D].南京:广西大学,2012:4-6.
[5] 张金才.卧式精密数控加工中心结构动态特性分析与修改[D].天津:天津大学,2010.
[6] 杨天时,张伯俊.柔性制造系统中机器人行走系统的结构设计[J].天津职业技术师范大学学报,2013,23(3):26-28.
Experimental modal analysis of robot walking system in flexible manufacturing system
ZHANG Peng-fei,ZHANG Bo-jun
(School of Mechanical Engineering,Tianjin University of Technology and Education,Tianjin 300222,China)
This paper first introduces the structure design of the robot walking system in a flexible manufacturing cell.Then through the main way of dynamic design of mechanical structure——the experimental modal analysis method (EMA),the results of design were studied.And combined with the finite element modal analysis method (FEM),these two kinds of analysis results were compared.The results of experimental modal analysis and comparing,which can effectively recognize the weak parts of the walking system,lay a good foundation for the optimized design of the walking system and improvement in dynamic performance of the walking system.
flexible manufacturing systems;walking robot system;experiment modal analysis
TP242
A
2095-0926(2014)03-0005-03
2014-04-22
张鹏飞(1988—),男,硕士研究生;张伯俊(1956—),男,教授,博士,硕士生导师,研究方向为车辆动力学仿真.
猜你喜欢
机械工业标准化与质量(2022年9期)2022-09-30
水泥工程(2022年2期)2022-08-22
军民两用技术与产品(2022年1期)2022-06-01
兰州交通大学学报(2022年2期)2022-04-26
石油沥青(2021年5期)2021-12-02
文化创新比较研究(2020年7期)2021-01-13
上海大学学报(自然科学版)(2020年4期)2020-05-24
特种结构(2019年2期)2019-08-19
苏州科技大学学报(工程技术版)(2019年2期)2019-07-19
同济大学学报(自然科学版)(2018年1期)2018-02-08
