
一类具有时滞的捕食系统的全局稳定性
2014-02-26 05:49刘敏
巢湖学院学报 2014年3期
刘 敏
(巢湖学院数学系,安徽 巢湖 238000)
1 引言
本文考虑的是具有时滞的Holling-I型功能反应的下列简化捕食者-食饵系统:

这里 x、y 分别表示食饵种群和捕食者种群的密度。 设其初始条件为 x0(θ)=φ1(θ)≥0, y0(θ)=φ2(θ)≥0,θ∈[-τ,0],x(0)>0,y(0)>0,k0,k1,δ,β 均是正数,且考虑到模型的生物学意义,我们仅对其在内进行讨论。文[1]讨论了该捕食系统的解的有界性和持久性,并分析了正平衡点的局部稳定性和Hopf分支的存在性,给出了下述结论:
引理 1[1]当 t充分大时,系统(1)是最终有界的,有 x(t)≤k0,y(t)≤M,其中
引理2[1]当时,系统(1)是持久的。
引理 3[1]系统(1)的唯一正平衡点 E*(x*,y*)是条件稳定的,其中

这里0<x*<k0<k1.
本文在上述结论基础上,主要对系统(1)的正平衡点E*的全局稳定性进行研究。
2 正平衡点的全局稳定性
由引理2及其证明,我们知当系统(1)是持久的,则其解满足m1≤x≤k0,m2≤y≤M,这里.下面我们将利用Liapunov方法来研究系统(1)的正平衡点E*的全局稳定性问题,给出下列结论:
定理 若系统(1)是持久的,并且满足:

那么系统(1)的正平衡点 E*(x*,y*)是全局渐近稳定的。

又由引理1和引理2,可知存在T>0,使得t>T时,有


由(3)式可得


由(2)、(3)和(4),可得
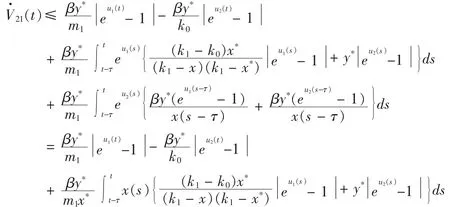
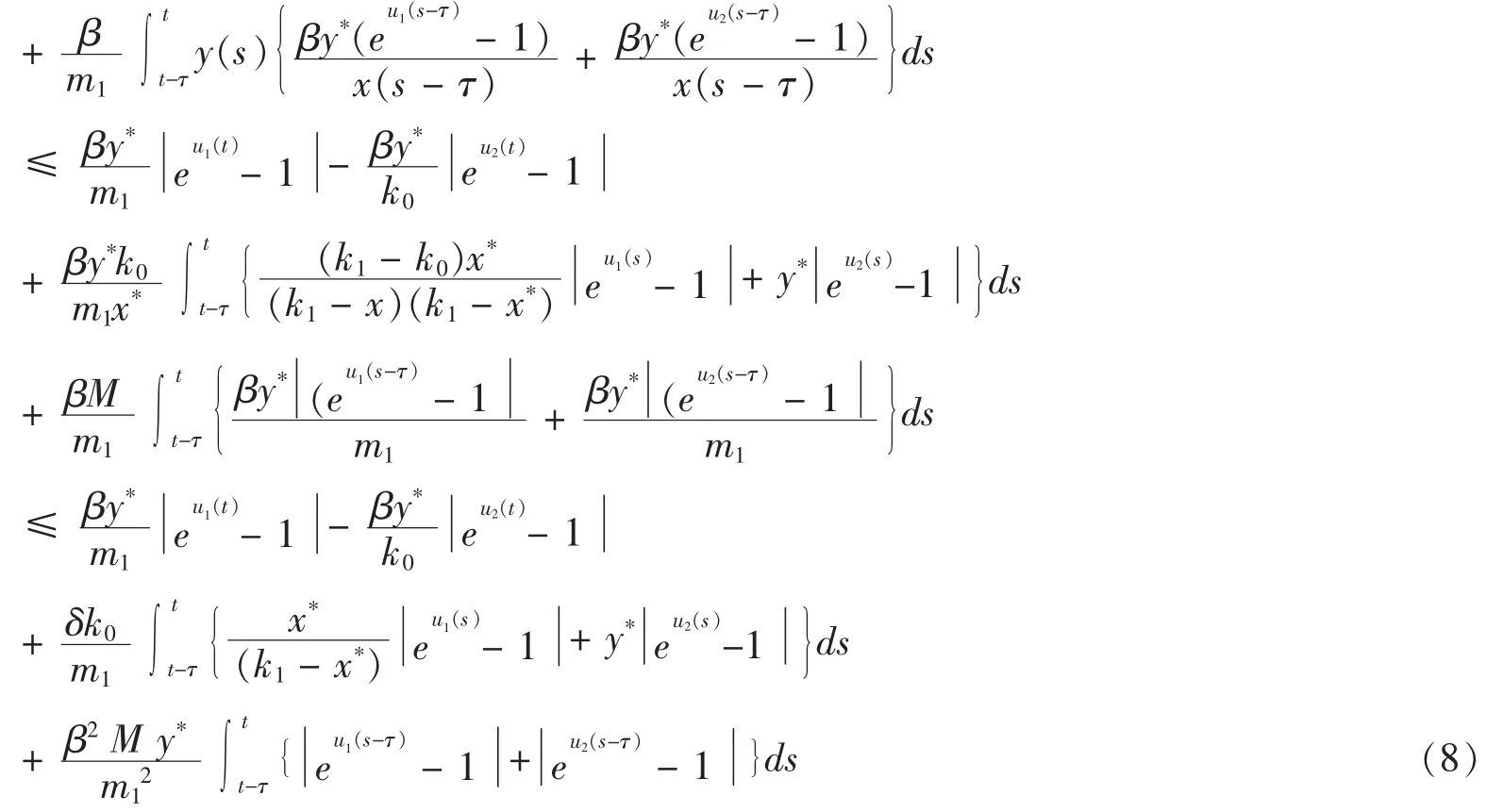
定义

从而有
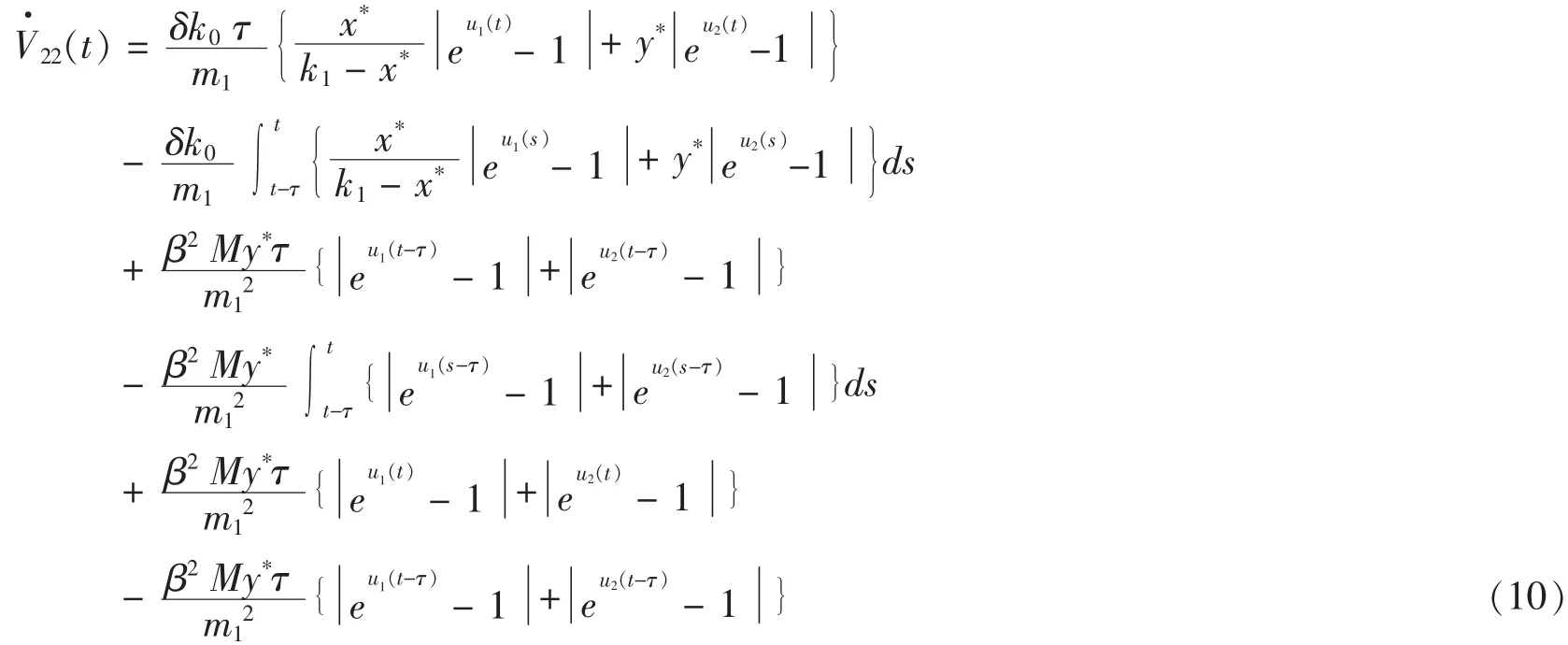
令 V2(t) =V21(t) +V22(t),则由(9)和(10)可得

再令 V(t) =V1(t)+V2(t),则由(5)和(11)有

又由系统(1)的解具有持久性,可知存在T>0,使得时t>T,有

利用中值定理知,存在 0 < θ1(t)< u1(t),0 < θ2(t)< u2(t)使得
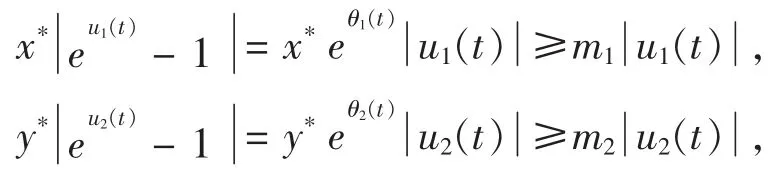

根据Liapunov稳定性定理,方程(2)-(3)的零解是全局渐近稳定的,由此可得系统(1)的正平衡点E*是全局渐近稳定的。
[1] 刘敏.一类具有时滞的捕食系统的持久性和Hopf分支的存在性[J].巢湖学院学报,2009,(3):4-6.
[2] 李义龙,肖冬梅.具有非单调功能反应的捕食系统的定性分析[J].上海交通大学学报,2007,(5):848-851.
[3] 尤秉礼.常微分方程补充教程[M].北京:人民教育出版社,1982.
[4] 马知恩.种群生态学的数学建模与研究[M].合肥:安徽教育出版社,1996.
[5] 马知恩,周义仓.常微分方程定性与稳定性方法[M].北京:科学出版社,2001.
[6] Lv S,Min Zhao.The dynamic complexity of a three species food chain model[J].Chaos,Solitons&Fractals,2008,(37):1469-80.
[7] Sun Cheng jun,Lin Yi ping,Han Mao an.Stability and Hopf bifurcation for an epidemic disease model with delay[J].Chaos,Solitons&Fractals,2006,(30):204-216.
[8] Zhiqi Lu,Xia Liu.Analysis of a predator-prey model with modified Holling-Tanner functional response and time delay[J].Nonlinear Analysis:Real Applications,2008,(9):641-650.
猜你喜欢
数学物理学报(2021年6期)2021-12-21
魅力中国(2021年24期)2021-11-26
化工管理(2021年7期)2021-05-13
恋爱婚姻家庭(2020年25期)2020-09-08
新疆大学学报(自然科学版)(中英文)(2020年2期)2020-07-25
佛山科学技术学院学报(自然科学版)(2019年1期)2019-03-20
太原师范学院学报(自然科学版)(2018年2期)2018-08-17
中外文摘(2016年13期)2016-08-29
中华皮肤科杂志(2014年3期)2014-12-19
大众考古(2014年7期)2014-06-26
