
基于MATLAB的塔式起重机仿真实体训练系统
2014-02-22 08:44彭雪鹏王永红
电子测试 2014年13期
彭雪鹏,王永红
(抚顺职业技术学院,113122)
基于MATLAB的塔式起重机仿真实体训练系统
彭雪鹏,王永红
(抚顺职业技术学院,113122)
本文通过采集真实的塔式起重机运动数据、驾驶联动台的控制数据,对于运动数据基于MATLAB进行建模分析,建立按比例缩小的塔式起重机仿真实体模型,分析驾驶联动台的控制数据,实现伺服电机与塔式起重机动作的高比例仿真动作,用PID 控制模拟抗风防摆工作工程。再现塔式起重机操作人员在操作过程中看到的情况,并通过高精度微缩模型的动作达到与操作者实时互动,大幅度降低培训成本。
塔式起重机;模拟仿真;实体建模
中国法分类号:TH218
1 塔式起重机仿真实体训练系统研究的意义
塔式起重机是建筑施工必不可少的关键设备,占地大、耗能高,同时又具备一定的操作危险性,使得培训一名合格的塔式起重机操作员成本巨大。塔式起重机仿真实体训练系统可模拟吊车操作基本动作、吊钩上下移动、左右旋转、吊载实物操作、指挥手式判断及操作实践训练。同时,可进行塔机主要零部件机维修保养、常见故障、常见事故、抗风防摆等工作模拟和处理,既保证操作人员的实习时间、实习的安全,又减少了实训设备的投入。
2 国内外研究现状
目前,国内塔式起重机的模拟训练器已经研制成功,普遍使用了电脑软件编制+显示器模拟的方式,视野较小、只能看到二维的图像、立体感较差,学员培训完毕后,仍需要相当长的时间来适应实际的操作。国外塔式起重机的模拟训练器使用半球幕和高分辨率的投射系统能产生高清晰度的宽视域图象,提高了立体显示的实际效果。但成本过高,在国内的普通教育机构中难以推广。
目前国内外塔式起重机的模拟训练器都没有塔式起重机的安装、调试、故障检测、抗风防摆等功能。
3 塔式起重机仿真实体训练系统方案
3.1 塔式起重机仿真实体模型训练系统组成
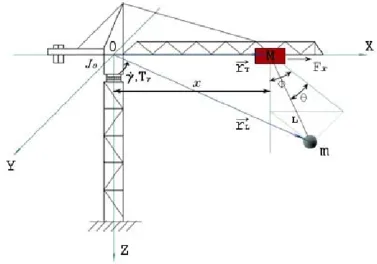
塔式起重机仿真实体模型训练系统由真实的塔式起重机驾驶联动台和塔式起重机仿真实体模型(图1)组成。起重机仿真实体模型与真塔式起重机的比例约是1:50,具体零件尺寸由建模后数据分析计算得到。电机驱动装置按照实际驱动装置以相同比例缩小,按照国家塔吊考核设备课题要求,制作相应大小的吊物,使操作员得操作做到了与实际完全相同,而且实现了各个方位的全景展示,操作员可随时从个各方向看到自己操作的错误,从而实现学习塔机的各种功能及操作要点,迅速掌握操作塔机的技能的目的。
3.2 基于MATLAB构建动力学模型
分析运动状态,确立变幅机构动力学方程(图2),基于MATLAB软件,构建线性化动力学模型。(图3)

图2 变幅机构动力学方程
Figure 2. the Kinetic Equation of Luffing Mechanism
基于MATLAB软件,根据线性化模型式,计算塔式起重机在同时进行变幅、回转和起升运动的工况下系统的运动状态,载荷在移动过程中,做变幅摆动,到达目标位置后,做等幅摆动。
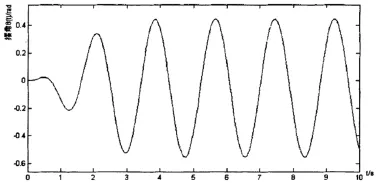
图3 线性化动力学模型Figure 3. the Dynamic Model of Linearization
根据Lagrange.Euler运动方程,对塔式起重机微分运算得到塔式起重机非线性动力学模型,并在一定的条件下,对非线性模进行线性化处理,得到线性化动力学模型。
3.3 构建抗风荷载模型参数:
(1)体系运动微分方程建立如下:
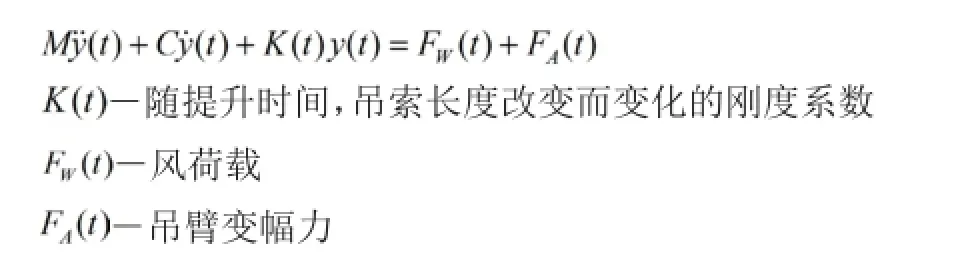
上式与常规动力体系比对,主要差异在于刚度系数随动变化,按前述假定,将吊臂和吊绳的振动作为高阶振型滤去,主要分析重物的水平振动模式,则按瞬时动平衡条件可知,刚度系数为吊绳长度或运行速度的函数,当运行速度为匀速时,也可直接表示为起吊时间的函数,可得刚度系数与提升时间的函数关系为

(2)风荷载的确定
吊升过程中,随着高度的增加,荷载幅增加,参照建筑结构荷载规范,塔机参数中设定的作业风速为20m/s,根据建筑结构荷载规范,计算风压取为0.24,根据起吊重物特征,风载幅值取为2.4(此值在具体作业过程中,应再根据吊物特征进行调整);风荷载的周期一般在数秒至几分钟,为了模拟体系在不同风振频率下的动响应,体系模拟时取荷载频率从0.25~64,分九种不同的模型进行了体系在变幅正弦荷载作用下的动力响应分析,基本涵盖了风 的作用频段,并与将风幅值荷载按单调加载模式的位移响应结果进行比对,
分析如下:
体系的最大响应出现在风荷载作为单调增加荷载模式下;
在周期荷载作用下,随着荷载频率的减小,体系前期位移相对增大,但后期 位移相对减小,即在周期荷载作用下时,体系响应的最大位移与荷载周期有关;
在各类荷载使用下,当进入体系后期后,由于体系刚度的增大,同时与刚度有关的阻尼效应也会明显增强,体系的动位移都会相对减小,
减速及停车阶段的控制器设计,可以实现位置的准停和减速过程中消除摆动。在仿真工程中,防摆控制器采用了经反馈线性化后用经典 PD 控制的方案,并将其作为了整个控制系统的内环,而外环则是经 NCD 优化的 PID 控制器。
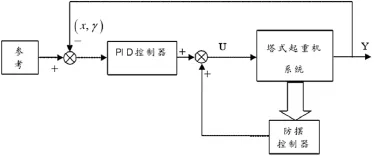
图4 防摆控制系统框图Figure 4. the Block Diagram of Anti-swing Control System
4 塔式起重机仿真实体训练系统效益分析
4.1 经济效益
该装置核算价格约为 9.2 万元,一家培训机构的基本配置为15台,那么,形成的产值为138万元,据不完全统计,全国各级各类培训机构就有近百家,那么,需求为0.15万台。形成的产值为1.38亿元,经济效益是巨大的。
4.2 社会效益
塔式起重机实体模型仿真训练系统,很好地改变了目前塔机操作培训落后的局面,颠覆了施工设备操作培训的传统方式,为操作培训注入了高科技含量。
5 结论
塔式起重机实体模型仿真训练系统,很好地改变了目前塔机操作培训落后的局面,颠覆了施工设备操作培训的传统方式,为操作培训注入了高科技含量,适合对大批量人员进行培训,大幅度降低培训成本。
[1] 徐书娟.塔式起重机训练仿真系统的视景仿真研究[D].济南:山东建筑大学, 2010
[2] 高顺德,孙长宏,孙吉产,王欣,焦博.塔式起重机虚拟仿真训练系统研究与实现[J].《建筑机械》2012,(11):107-111
[3] 李露.塔式起重机模拟器场景中特效技术的研究与实现[ D].武汉理工大学 2011
[4] 胡荣保,高飞,肖刚,袁晓阳.基于Virtools的桥式起重机仿真训练系统研究[J].《中国制造业信息化》 2012年13期
[5] 席瑞萍,高崇仁.基于ADAMS的塔式起重机动力学仿真[J] .中国重型装备 2009,(4):1-3
[6] 杨纯秋.QTZ25塔式起重机静力仿真分析[J].价值工程, 2012,(27):48-50
Based on the MATLAB Solid Simulation Training System of Tower Crane
Peng Xuepeng,Wang Yonghong
(Fushun Vocational Technology Institute,113122)
Based on analyzing the motion data with MATLAB,the simulated solid modeling of tower crane is found scaling-down by collecting the motion data of the actual tower crane and the control data of the driving worktable.Therefore,higher simulation action between servo motor and tower crane is achieved.The wind resistance and anti-swing are simulated by PID controller.The operating process by the tower crane driver will be reconstructed and the interaction between the miniatures and the driver will be carried out. As a result,the training cost cuts down.
tower crane;analog simulation;solid modeling
彭雪鹏(1974-),男,辽宁抚顺人,副教授,主要从事机械设计、机械制造开发利用方面的研究
猜你喜欢
机械工业标准化与质量(2022年7期)2022-08-12
中国特种设备安全(2022年3期)2022-07-08
施工技术(中英文)(2021年9期)2021-06-29
科教导刊·电子版(2020年24期)2020-10-21
中等数学(2020年2期)2020-08-24
测控技术(2018年9期)2018-11-25
中国特种设备安全(2018年12期)2018-03-15
北京航空航天大学学报(2016年7期)2016-11-16
光学精密工程(2016年3期)2016-11-07
中国房地产业(2016年20期)2016-04-12
