
基于超声电机驱动的电位器寿命试验系统控制器设计
2014-02-22 08:44刘富品张小亚
电子测试 2014年13期
刘富品,樊 栋,张小亚
(1.中国航天标准化与产品保证研究院,北京,100071;2.西安创联超声技术有限责任公司,西安,710065)
基于超声电机驱动的电位器寿命试验系统控制器设计
刘富品1,樊 栋2,张小亚2
(1.中国航天标准化与产品保证研究院,北京,100071;2.西安创联超声技术有限责任公司,西安,710065)
根据GJB1865-94《非线绕精密电位器总规范》中电位器寿命的试验要求,设计了一种基于PIC18F4431作为控制核心、以超声电机驱动的电位器寿命试验控制器,同时采用LM2678和MC33063作为调压主模块,上位机软件为主操作界面,实现电位器寿命试验系统参数的预设置、运行情况的实时监控,具有操作方便、加载电压、旋转速度精度高等优点。
电位器寿命试验控制器;PIC18F4431;LM2678;MC33063
0 引言
现有的电位器寿命试验系统采用硬件控制,手动电压加载,对于加载电压的时机、时间、幅值,以及旋转速度均无法进行精确控制,无法满足GJB1865-94《非线绕精密电位器总规范》中电位器寿命试验的要求。并且每次寿命试验只能装夹一个电位器,如需多个产品进行试验时,试验周期很长,将耗费大量的时间人力,为了解决以上问题,设计并制造了可同时装夹8只电位器进行寿命试验的全自动电位器寿命控制系统。
1 控制器总体设计
电位器寿命试验系统以超声电机作为驱动源,进行精确速度的输出。控制器采用24v直流供电,主要分为四部分:
(1)超声电机硬件驱动部分
(2)升压部分(输出电压≥20v)
(3)降压部分(输出电压<20v)
(4)RS232串行通信部分
控制器需提供给超声电机相位差为π/2的A,B两相正弦波,旋转方向由A,B两相的相位关系确定,如果A相超前B相,则电机正转,如果B相超前A相,则电机反转。
控制器为适应不同型号电位器的要求,设计为电机转速可调和负载电压可调(其调节范围如表1);系统运行时每5000转换向一次;定期存储试验参数;设计系统掉电保护功能,重新上电后,系统按照前一次存储的试验参数自动重启。

表1
控制器总体设计方案框图如图1所示。
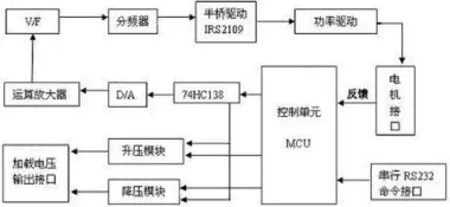
图1 控制器总体设计框图
控制器主要工作过程如下:PC端上位机通过发送串行数据设置系统工作参数,MCU(PIC18f4431)根据设定参数启动电机工作,系统默认电机每5000转换相一次,并输出设定电压。
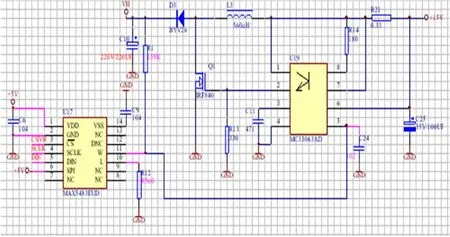
图2 升压电路设计
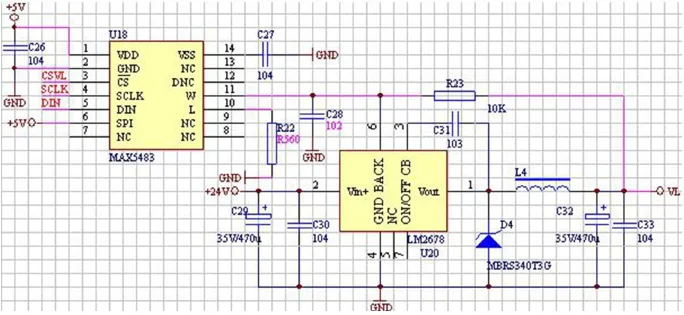
图3 降压电路设计
2 控制器硬件设计
2.1 超声电机硬件驱动设计
通过MCU控制HEF4046进行压频转换,经过分频器分频后产生满足超声电机正常工作的频率范围35Khz~45Khz,再通过IRS2109半桥驱动功率电路,产生相位差为π/2的A,B两相信号。MCU可通过I/O引脚直接控制电机的启停和转动方向。
2.2 升压电路设计
当要求输出电压大于20V时采用MC33063进行升压,而MC33063自身驱动输出小于40V,因此采用图2电路设计,突破了40V的限制,可产生系统需求的100v输出电压。
图中VH为电压输出端,其数学表达式为:VH=1.25[1+R1/ (Rmax5483+R12)]
其中R1=158kΩ,R12=560Ω,Rmax5483为max5483输出电阻,其调节范围为(70Ω~10070Ω)
因此,VH两个极限值为:
VHmin=1.25*[1+158000Ω/(10070Ω+560Ω)]=19.829V
VHmax=1.25*[1+158000Ω/(70Ω+560Ω)]=314.742V
调节范围满足控制器升压电路20V~100V输出的要求。
2.3 降压电路设计
当要求输出电压小于20v时采用LM2678进行降压,电路如
图3所示。
图中VL为电压输出端,其数学表达式为:VL=1.21[1+R23/ (Rmax5483+R22)]
其中R23=10kΩ,R22=560Ω,Rmax5483为max5483输出电阻,其调节范围为(70Ω~10070Ω)
故VH两个极限值为:
VHmin=1.21*[1+10000Ω/(10070Ω+560Ω)]=2.348V
VHmax=1.21*[1+10000Ω/(70Ω+560Ω)]=20.416V
调节范围满足控制器降压电路2.5V~20V输出的要求。
2.4 数字电位器芯片
控制器升压电路和降压电路均采用了MAXIM公司的max5483数字电位器芯片。该芯片为1024步高精度低功耗数字芯片,可用2.5vDC双电源供电或5vDC单电源供电,温度特性好,阻值调节范围为70Ω~10070Ω。
控制器中采用了两片max5483,均与MCU采用3线SPI串行接口通信,为了节省MCU的I/O资源,两芯片的时钟线SCK,数据线DIN,接相同的I/O引脚,而控制器工作时通过片选CS端选择不同的芯片。max5483芯片SPI通信时序如图4。
3 软件设计
PIC单片机内部采用哈佛结构,具有指令执行速度快,性能稳定等特点,在控制器中由于MCU要处理光电编码器返回的电机实时信息,故选取PIC18F4431作为主控芯片,其内部集成QEI(Quadrature Encoder Interface)正交编码器接口,通过简单的软件算法即可得到电机的位置和速度信息。
3.1 控制器软件结构
软件部分按功能可划分为四个模块:系统初始化模块,EEPROM读写模块,串行通信模块,命令执行模块。
各模块主要功能如下:
(1)系统初始化模块完成系统初次上电时各硬件资源的配置
(2) EEPROM模块完成在电机换相时将系统实时运行参数写入MCU内部EEPROM中,并在系统重新上电时将前一次写入的系统参数读出。
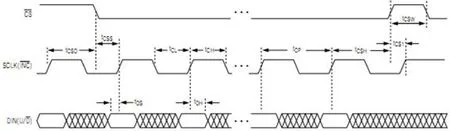
图4 max5483芯片SPI通信时序
(3)串行通信模块完成接收上位机所发的命令,并在接收到遥测命令时将当前电机运行参数和加载状况等系统参数返回给上位机,方便上位机进行实时信息监测。
(4)命令执行模块执行系统接收到的命令,采用PID算法稳定电机转速,实现精确的旋转速度控制,并在系统完成工作周期时自动停止运行,告诉上位机当前工作已完成。
3.2 软件执行流程如图5
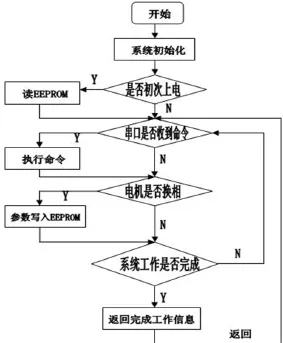
图5 软件流程图
本控制器具有掉电保护参数功能,系统初始化完毕后首先判断是否重新上电,如果重新上电则读取MCU的EEPROM模块中存储的断电前系统运行参数,接着断电前的状态继续工作。串口接收模块具有高级中断优先级,能够及时响应上位机的请求,命令类型分为:启动电机命令,停止系统工作命令,暂停运行命令,继续运行命令,遥测返回命令,电压加载命令,电压卸载命令。其中遥测返回命令需要相上位机返回当前电机运行总圈数,当前转速,设置工作圈数,设置转速,当前加载状态,当前负载电压大小等信息。
4 系统概况
电位器寿命试验(也称耐磨试验)系统由控制器、上位机软件和超声电机驱动装置组成。
控制器实物如图6所示

图6 电位器寿命试验控制器
整体尺寸为22 cm*13.5cm* 5.5cm , 使用时需配套:PC机、上位机软件(电位器负荷耐磨寿命系统.exe)、电机驱动装置、DB9数据线,24V电源线。
上位机软件(电位器负荷耐磨寿命系统.exe)采用LabVIEW编写,LabVIEW是一门广泛应用的编程语言和开发环境,依靠其丰富的函数和子程序库,采用图形化编程语言,提高了软件开发效率,其开发的应用程序可以运行在Windows、Mac、Linux、WinCE以及多种嵌入式平台上。图7中,系统工作界面是与西安创联超声技术公司联合开发的上位机软件。

图7 系统工作界面
从上图可以看出系统电机当前已旋转13145周,转速为300RPM与设定转速一致(表明控制器速度调节精度高),当前处于加载状态,加载电压为23.7V。当旋转圈数“13145”增到设定圈数“10000000”则系统自动停止运行,系统本次工作完成。
5 结语
电位器寿命试验系统控制器采用PIC18F4431、MAX5483、MC33063、LM2678等集成芯片作为硬件设计平台,与上位机协调工作的方式,实现了电位器寿命试验系统的全自动化精确控制,并可长时间稳定工作。克服了以往电位器试验中人工操作的精度差、数据难于处理和记录、反复调节等诸多问题,通过上位机软件直观地反映当前系统工作状态,具有很强的实际应用价值。
[1] 林静,林振宇,郑福仁.LabVIEW虚拟仪器程序设计[M].北京:人民邮电出版社,2013
[2] PICmicro中档单片机系列参考手册.Microchip Technology INC,2004
[3] MAX5483 datasheet.Maxim Integrated Products,2007
[4] PIC18F4431 datasheet. Microchip Technology INC,2005 [5] 刘金琨.先进PID控制及其MATLAB仿真[M].北京:电子工业出版社,2003
Design of test system of ultrasonic motor drive controller potentiometer life based on
Liu Fupin1,Fan Dong2,Zhang Xiaoya2
(1.Chinese aerospace standards and Product Assurance Institute,Beijing,100071; 2.Xi'an Chuanglian Ultrasonic Technology Co.,Ltd.,Xi'an,710065)
According to the requirement of test GJB1865-94 "non wire-wound precision potentiometer general specification" in life,we design a potentiometer life test device,it is driven by ultrasonic motor and controlled by PIC18F4431 as controlling core using LM2678 and MC33063 as voltage regulating main module, using host computer as operation interface,it has function for parameter pre-setup and real-time monitoring etc.it is convenient to operate,and it is high accuracy to control the output voltage and rotation speed.
potentiometer life-test controller;PIC18F4431;LM2678;MC33063
刘富品(1970-),女,硕士,多年来一直从事航天行业电子产品质量保证、检测评价及机理分析、标准研制工作。
猜你喜欢
中老年保健(2021年8期)2021-12-02
作文评点报·低幼版(2020年3期)2020-02-12
World Journal of Hepatology(2019年5期)2019-06-20
华人时刊(2018年17期)2018-12-07
车迷(2018年12期)2018-07-26
奥秘(2017年12期)2017-07-04
中国老区建设(2016年3期)2017-01-15
中国信息技术教育(2016年23期)2017-01-03
山东工业技术(2016年15期)2016-12-01
学习月刊(2015年3期)2015-07-09
