
主动前轮转向客车的操纵稳定性仿真分析
2014-02-09 09:07来飞于雅丽
客车技术与研究 2014年2期
来飞,于雅丽
(1.重庆车辆检测研究院国家客车质量监督检验中心,重庆401122;2.中国公路车辆机械有限公司,北京100023)
主动前轮转向客车的操纵稳定性仿真分析
来飞1,于雅丽2
(1.重庆车辆检测研究院国家客车质量监督检验中心,重庆401122;2.中国公路车辆机械有限公司,北京100023)
建立某大型客车的含侧向、横摆及侧倾三自由度动力学模型,通过方向盘角阶跃转向仿真结果和试验数据的比较,验证了仿真分析的准确性。采用横摆角速度跟踪主动前轮转向控制策略,结合比例积分控制方法,在考虑作动器动态特性和前轮转角饱和特性的基础上,对主动前轮转向控制前后的车辆进行直线行驶下的侧向风扰动和湿滑路面急转弯情况下的仿真对比分析。结果表明,主动前轮转向控制后的车辆其操纵稳定性和行车安全性都有较大的提高。
客车;主动前轮转向;操纵稳定性;横摆率跟踪控制
尽管客车交通事故比轿车和卡车少,但是其死伤程度较高,更为人们所关注。根据事故报道,横摆失稳是导致客车事故的主要原因之一[1-7]。出现紧急情况时,驾驶员一般很难保持横摆稳定,与轿车相比,客车的线性工作区间窄、横摆响应慢;与货车相比,客车的侧翻阀值低。
车辆的横摆稳定性和侧倾稳定性是耦合的。一旦横摆失稳,就会威胁到侧倾稳定性[8-10]。横摆失稳将导致客车侧向运动变得不可控,最终导致侧翻事故。
近些年,前轮转向控制技术取得了较大的进展。有两种方式可实现:线控转向和主动前轮转向(Active Front-wheelSteering,AFS)。线控转向由于失去了机械连接,一旦控制器出错,车辆方向将处于失控状况。另外,也失去了行驶中的“路感”;主动前轮转向增加了附加转角,同时又能保持方向盘与车轮的机械连接。
本文以某大型客车为例,建立其三自由度动力学数学模型,通过主动前轮转向横摆率跟踪控制技术,有效地控制了其横摆角速度和侧偏角,从而减少侧翻事故的发生。
1 客车动力学模型的建立
1.1 车辆三自由度模型
建立车辆三自由度操纵稳定性分析模型[2-3],如式(1)-(3):即沿y轴方向的侧向运动、绕z轴的横摆运动以及绕x轴的侧倾运动,忽略车辆纵向和俯仰运动,并假设车辆关于x轴对称,如图1所示。式中:M为整车质量;Ms为簧上质量;h为簧上质量至侧倾中心的垂直距离;Ixx为簧上质量绕x轴的转动惯量;Izz为整车绕z轴的横摆转动惯量;Ixz为簧上质量绕x轴和z轴的惯性积;Kφ、Cφ为悬架等效侧倾刚度和阻尼系数;lf、lr为整车质心至前轴和后轴距离;Ff、Fr为前后轮胎侧偏力;T为左右轮距;图1中,Mus为簧下质量;hR为侧倾中心离地面的高度。
1.2 轮胎模型
车辆轮胎可处理为非线性轮胎模型和线性轮胎模型。其中,非线性轮胎模型主要用于客车不同行驶工况下的仿真分析。
1)非线性轮胎模型。采用魔术公式轮胎[4],其侧偏力表达式如下:
1.3 状态方程
为研究方便,将线性轮胎模型表达式代入车辆动力学方程,最终转化成状态空间形式。
选取系统的状态向量:
2 控制器设计
客车侧翻大多是由于车辆横摆失稳或侧偏导致车辆与其它物体发生相撞后发生,因此,控制的目的是有效控制车辆的横摆角速度,同时避免质心侧偏角过大。与侧偏角相比,横摆角速度更容易测量或估计,同时横摆角速度的反馈控制对于车辆动力学的未建模动态特性和其它外界干扰如侧向风等的抑制也是十分有效的。因此,本文采用跟踪横摆角速度的控制策略,具体控制框图如图2所示。
在客车主动前轮转向控制器的设计中,作动器的动态特性也是一个非常重要的影响因素,其动态特性可近似为一个二阶传递函数,如下式所示:
上式中,作动器的带宽ωa为5Hz,阻尼比ζ为0.7。除了作动器的动态特性外,客车的最大转向角也是制约控制系统性能的另外一个因素,受实际转向机构的限制,客车的最大转向角一般为40°左右。因此,在控制系统中,增加了如图3所示的客车前轮转向角饱和函数。
在横摆率控制器的设计上,采用比例积分(PI)控制方法,其表达式如式(4)所示,其中e为误差信号;kp为比例系数;ki为积分系数;u为控制器输出。
3 算例分析
通过一个数值算例对某款大型客车的操纵稳定性能进行仿真分析,表1为其相关物理参数。
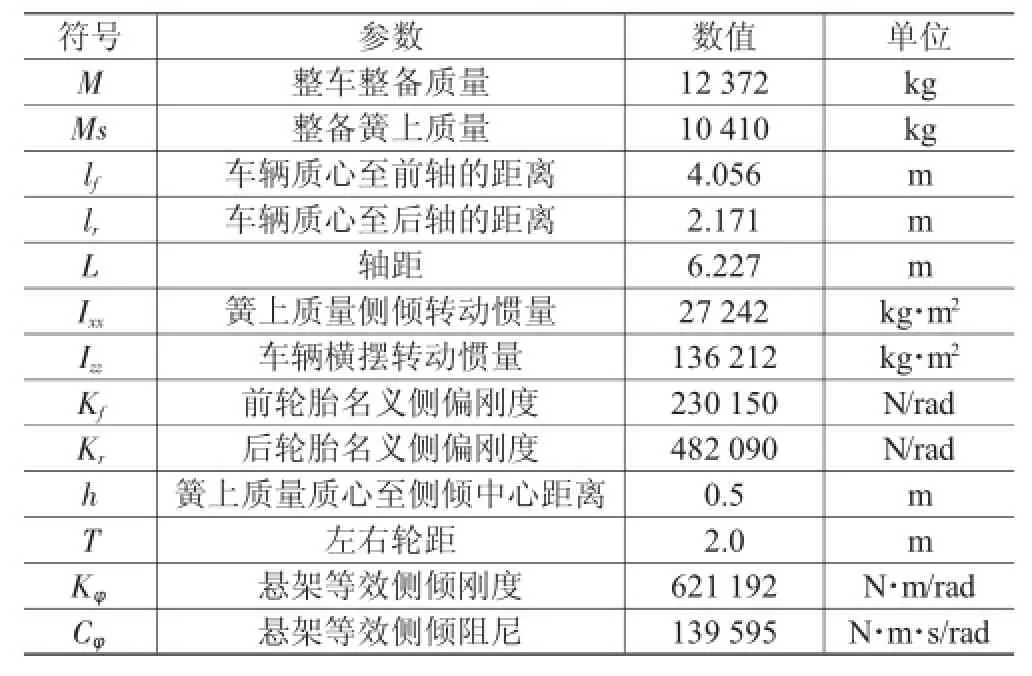
表1 车辆系统参数
3.1 仿真与试验对比
对建立的非线性轮胎3自由度车辆动力学模型进行了方向盘角阶跃输入下的仿真分析,车速为6.67m/s。前轮转角输入、车辆侧向加速度和横摆角速度响应分别如图4(a)、(b)和(c)所示。可以看出,仿真分析结果与试验数据基本一致。
3.2 控制前后效果比较
3.2.1 直线行驶下的侧向风扰动
对控制前后的车辆进行车辆直线行驶下的侧向风扰动的仿真对比分析,均采用非线性轮胎模型,其中车速为15m/s,侧向风阻模型采用Fside=0.5ρAsCdV2w进行描述。式中:空气质量密度ρ为1.225 kg/m3;客车侧向迎风面积As为31.5m2;空气阻力系数Cd为0.85,风速Vw为15m/s[11]。
在如图5所示的侧向风扰动下,由于车身侧面几何中心与车辆质心纵向间距大约为1m。因此,除了侧向力的干扰外,客车还受附加的横摆力矩干扰。
在侧向风扰动的情况下,客车驾驶员也会采取一定的修正措施。本文采用线性预瞄的驾驶员模型,其表达式如下:
式中:δd为驾驶员修正转角;△l为车辆侧向偏移距离;Gs为转向增益;LP为驾驶员预瞄距离;Tr为驾驶员反应时间。
图6为在侧向风干扰下、驾驶员在没有AFS和带AFS车辆的横向位移对比情况。可以看出,在没有AFS的情况下,车辆横向最大偏移量约为0.12m,而带有AFS的车辆的横向最大偏移量仅为0.04m。因此,在有侧向风干扰的情况下,无AFS的客车与其它障碍物发生碰撞的概率要远大于带有AFS的车辆。
3.2.2 湿滑路面急转弯
对控制前后的车辆进行湿滑路面上的转向盘角阶跃输入试验下的仿真对比分析,均采用非线性轮胎模型,路面附着系数取0.5,车速为20m/s。
定义车辆侧翻因子Rindex为右侧车轮与左侧车轮的垂直载荷之差除以右侧车轮与左侧车轮的垂直载荷之和,即Rindex=(Fz,R-Fz,L)/(Fz,R+Fz,L)
角阶跃输入试验下,起跃时间为0.1s,起跃速度为200°/s,车辆性能指标的仿真分析结果如图7(a)-(c)所示。
从图7(a)、(b)可以看出,使用AFS的客车与未使用AFS的客车相比,其车辆的操纵稳定性得到了很大程度的改善。在湿滑路面急转弯的情况下,未使用AFS的车辆已严重失稳,车辆的质心侧偏角最大已达到40°,侧滑情况非常严重。同时,车辆的横摆角速度也急剧下降至0附近,而后经短时间的反方向旋转后又快速恢复至正向旋转。而使用AFS的车辆尽管质心侧偏角和横摆角速度响应出现了一定程度的波动,但依然处于可控范围之内。同时从图7(c)可以看出,AFS控制后的车辆的侧翻因子最大为0.4左右,而未有AFS控制的车辆其侧翻因子已达到-1,表明未使用AFS的车辆在湿滑路面急转弯的情况下,其右侧车轮已完全离地。同时,车辆侧滑明显,极有可能出现侧翻。
4 结束语
建立了某款客车的三自由度动力学模型,通过方向盘角阶跃输入下的仿真分析和试验对比,验证了仿真分析的准确性。采用横摆率跟踪控制策略,结合比例积分控制方法,在考虑作动器动态特性和前轮转角饱和特性的基础上,设计了客车主动前轮转向横摆率跟踪控制系统。结合非线性魔术公式轮胎模型和线性轮胎模型,通过客车直线行驶下的侧向风扰动和湿滑路面急转弯仿真试验下有无AFS控制系统的结果对比分析,表明采用主动前轮转向AFS客车的操纵稳定性和行车安全性得到了较大改善。
[1]Masao Nagai,Motoki Shino and Feng Gao.Study on Integrated Control of Active Front Steer Angle and Direct Yaw Moment[J]. JSAEReview 2002,Vol(23):309-315.
[2]安部正人.汽车的运动和操纵[M].陈辛波,译.北京:机械工业出版社,1998.
[3]郭孔辉.汽车操纵动力学[M].长春:吉林科学技术出版社,1991.
[4]Egbert Bakker,Hans B.Pacejka,and Lars Lidner.A New Tire Modelwith an Application in Vehicle Dynamics Studies[J].SAE paper,No.890087:101-113.
[5]GB 7258-2004,机动车运行安全技术条件[S].北京:中国标准出版社,2004.
[6]GB 13094-2007,客车结构安全要求[S].北京:中国标准出版社,2007.
[7]丁良旭,徐宗俊,郭钢.汽车横向静侧翻稳定性的仿真评估[J].客车技术与研究,2005,27(6):10-12,20.
[8]马建,陈萌三.轮胎垂直载荷变化对大客车高速操纵稳定性影响的模拟分析[J].中国公路学报,1998,11(1):102-108.
[9]来飞,邓兆祥.含非线性轮胎模型的汽车四轮转向与主动悬架集成控制[J].中国公路学报,2009,22(3):113-120.
[10]来飞,黄超群.汽车四轮转向变增益跟踪控制的研究[J].汽车工程,2012,34(6):517-522.
[11]De Bruin,D.Lateral Guidance of All-wheel Steered Multiple-articulated Vehicles[M].Eindhoven:Techinische Unirersiteit Eindhoven,2001.
[12]Thomas D.Gillespie.车辆动力学基础[M].赵六奇,金达锋,译.北京:清华大学出版社,2006.
修改稿日期:2013-12-28
Simulation and AnalysisaboutCoach Active Front-wheelSteering System on Handling and Stability
LaiFei1,Yu Yali2
(1.ChongqingVehicleTest&Research Institute,NationalCoachQualitySupervision&InspectionCenter,Chongqing401122,China; 2.ChinaHighwayVehicle&MachineryCo.,Ltd,Beijing100023,China)
A large coach dynamicsmodelwith lateral,yaw and roll three freedoms isestablished.By the comparison between thesimulation resultsand the testdataunder the steeringwheelanglestep input,the accuracyof the simulationmodel is verified.And the active front-wheelsteering(AFS)yaw rate tracking control strategy is chosen.Combined with the proportional integral controlmethod,the actuator dynamicsand frontwheel angle saturation are considered.And the two situationsof the coach under the lateralwind disturbancewhen driving on the straight line and corneringsharply on the slippery roadsaresimulated between the AFScontrolled and uncontrolled systems.The resultshows that thehandlingstabilityand safetyof the coachwith AFShasbeen greatly improved.
coach;active front-wheelsteering(AFS);handlingand stability;yaw rate follow-up control
U461.6
A
1006-3331(2014)02-0005-04
重庆市质量技术监督局科研项目(KY201208)
来飞(1983-),男,博士;高级工程师;主要从事整车试验测试、车辆系统动力学及控制方面的研究;发表论文10余篇。
猜你喜欢
军民两用技术与产品(2022年2期)2022-06-01
北京航空航天大学学报(2021年4期)2021-11-24
汽车与驾驶维修(维修版)(2021年10期)2021-11-05
学校教育研究(2020年3期)2020-02-18
小学生学习指导·爆笑校园(2019年6期)2019-09-10
导航与控制(2019年2期)2019-06-12
中学课程辅导·教师通讯(2018年10期)2018-09-04
中学生数理化·高一版(2017年3期)2017-07-08
红蜻蜓(2015年11期)2016-02-02
中国自行车·骑行风尚(2014年4期)2014-10-10
