双三相永磁同步电动机交互磁饱和模型仿真研究
2014-01-31 09:02何新荟辛小南
微特电机 2014年4期
何新荟,辛小南,齐 歌
(郑州大学,河南郑州450001)
0 引 言
与传统三相永磁同步电动机相比,双三相永磁同步电动机具有以下优点:用低压器件实现大功率输出、减少空间谐波磁势、减少噪声、提高效率、实现可靠性冗余运行[1]。目前研究较多的双三相电机,两套绕组呈30°夹角。但在这种连接方式下,两套绕组之间存在耦合,对电机的控制性能会产生不利影响。为消除耦合的不利因素,本文采用两套绕组呈180°夹角的双三相电机[2]。同时,通常所采用的基于派克变换的d,q轴等效电路模型认为磁路是线性的,即模型中的电感值为常量[1],从而忽略了电机带负载时磁场饱和的影响。而实际上,由于磁滞影响,d,q轴均存在磁场饱和现象,两轴之间还存在交互磁饱和,所以这种不考虑饱和的电机模型是不够精确的。为改进这种模型,考虑交互磁饱和影响,本文利用MATLAB/Simulink搭建了基于内插外推法的饱和模型,并用仿真实验来验证饱和模型的有效性。
1 考虑交互磁饱和电机模型
对于两套绕组呈180°夹角的双三相电机,两套绕组的空间排列关系如图1所示。采用此绕组分布,可以有效削弱各个相绕组之间的相互影响,增大相绕组自感,减小相绕组之间的互感,尤其是两套三相绕组之间的互感,有利于双三相电机的解耦控制[2]。
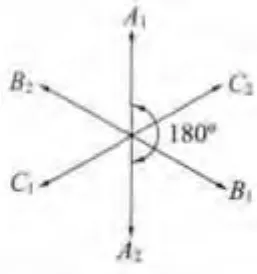
图1 双三相永磁同步电动机定子绕组分布
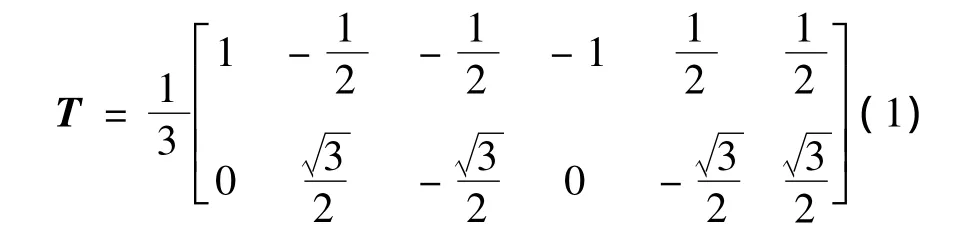
建立在六相静止坐标系上的数学模型复杂,不利于分析。为简化电机模型,利用转换矩阵T[3-4],得到两相静止α-β坐标系下的数学模型,然后通过派克变换,得到两相旋转d-q坐标系下的数学模型。
将电机模型从六相静止坐标系转换到α-β坐标系的转换矩阵T为:
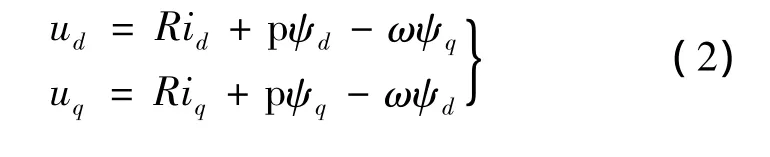
d-q坐标系下电压及磁链方程如下:
电磁转矩及运动方程如下:
式中:ud,uq为d,q轴定子电压分量;R为定子电阻;id,iq为 d,q轴电流分量;ψd,ψq为 d,q 轴磁链分量;Ld,Lq为 d,q轴电感分量;ψf为永磁体磁链;为微分算子;p为极对数;TL为负载转矩;J为转动惯量;ω为机械角速度。
1.1 d,q 轴交互磁饱和
考虑交互磁饱和法,是在磁链法的基础上,考虑了id,iq对 Ld,Lq的交互影响。故 ψd不仅与 id有关,还受到iq的影响;ψq也同时受到 id,iq的影响。此时磁链方程:

将式(6)代入式(2)、式(4)中,得考虑磁饱和的电压方程及电磁转矩方程:
为分析 id,iq对 Ld,Lq的交互影响,文献[2]利用有限元法得到的Ld,Lq与id,iq的非线性关系,如图2所示。
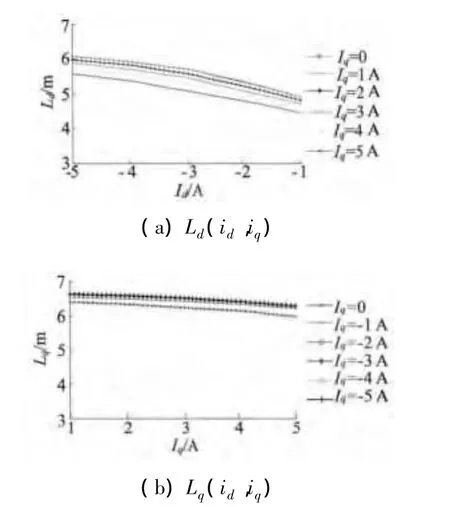
图2 d,q轴电感
电机空载时,输入功率全部转化为电机内部损耗;稳态运行时,电机内部损耗基本不变,故Ld,Lq可近似为常值。当电机负载逐步增大时,输入功率包含电机内部损耗和输出功率,由图可知,id负向增加,去磁作用明显,磁路饱和程度下降,磁导率变大,故Ld增大。考虑交互磁饱和的影响,iq的增加使得d轴磁路饱和程度稍有增加,故Ld有所下降。同时,Lq随着iq的变化不明显,iq增加,Lq略有减小;考虑交互磁饱和的影响,id的负向增加,使得q轴磁路受到影响,饱和程度下降,故Lq随着id负向增加而增大。
1.2 考虑交互磁饱和仿真模型
为反映图2中d,q轴交互磁饱和,利用MATLAB/Simulink建立双三相永磁同步电动机的仿真模型,如图3所示。模型输入为满足图1相角关系的双三相电压、负载转矩TL和永磁体磁链ψf,输出为双三相定子电流、电磁转矩Te和转速n。
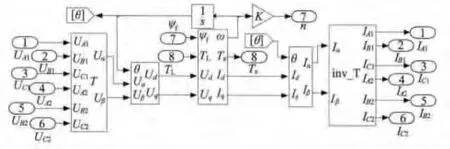
图3 双三相永磁同步电动机仿真模型
根据式(6)、式(7),可得d-q坐标系下电机磁链和电压模块,模块中id,iq的计算需要使用Ld,Lq的值,而电机的电机参数Ld,Lq与电机的运行状态有关:当电机空载时,Ld,Lq值是常量;当电机带负载运行时,由于磁饱和影响,Ld,Lq由电流 id,iq决定(见图2)。本文采用Switch模块以TL为条件来实现这种转换:当 TL=0 时,Ld=C1,Lq=C2,C1,C2为常量;当 TL>0 时,Ld=Ld1,Lq=Lq1,而 Ld1,Lq1为满足图2 的函数:Ld1=f1(id,iq),Lq1=f2(id,iq)。
由于d,q轴电感与电流呈非线性关系,难以写出由 id,iq求解 Ld1,Lq1的解析式 f1,f2。而内插外推法[5]可以通过已观测点数据来估算区域内或区域外未观测点的数据,且效率高、估值准确。为计算Ld1,Lq1的值,本文利用 MATLAB/Simulink中 Lookup Table(2-D)模块,采用两变量的内插外推法建立了 Ld1,Lq1的计算模块。
2 仿真验证
为验证考虑交互磁饱和仿真模型的有效性,将其与不考虑饱和的电机模型在MATLAB/Simulink环境下进行仿真比较。双三相绕组均采用Y接法,主要仿真参数:额定电流5 A,额定电压36 V,额定转速400 r/min,Ld=4.940 3 mH,Lq=6.400 5 mH,p=5,J=0.001 kg·m2,ψf=0.150 37 Wb,TN=5.5 N·m,R=0.419 Ω。
图4分别表示双三相永磁同步电动机不饱和、饱和模型定子电流d,q轴分量在负载转矩TL跃变时的变化曲线,图中虚线表示不饱和模型的id_unsat、iq_unsat,实线表示饱和模型的 id_sat,iq_sat。t=0.3 s 时,TL从0跃变为5.5 N·m。此时,定子电流d轴分量负向增大。对于饱和模型,考虑到交互磁饱和作用,d轴去磁作用明显,磁场饱和程度降低,故饱和模型的id_sat绝对值明显小于不饱和模型的id_unsat的绝对值。同时,定子电流q轴分量增大,由于受到d轴电流的影响,故饱和模型的iq_sat与不饱和模型的iq_unsat相比,增大不明显。
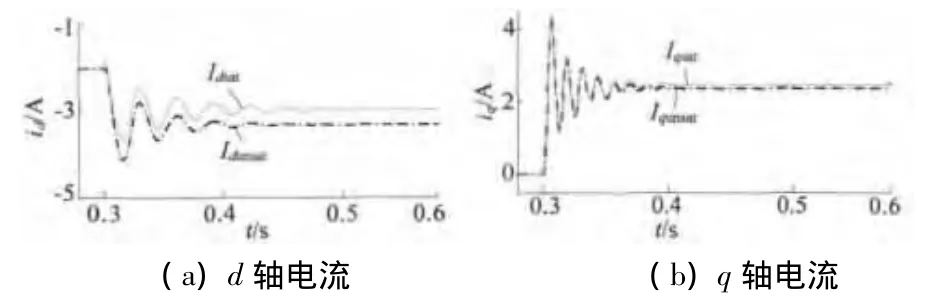
图4 定子d,q轴电流分量
图5为负载转矩跃变时,饱和电机模型的仿真结果。t=0 s时,电机空载,经过0.14 s短时波动达到稳定运行状态,定子电流幅值为2.04 A,电磁转矩为0,转速为额定转速400 r/min。t=0.3 s时,负载转矩跃变为5.5 N·m,经过0.14 s短暂波动,定子电流幅值稳定在3.825 A,电磁转矩达到额定负载转矩,转速恢复为额定转速。
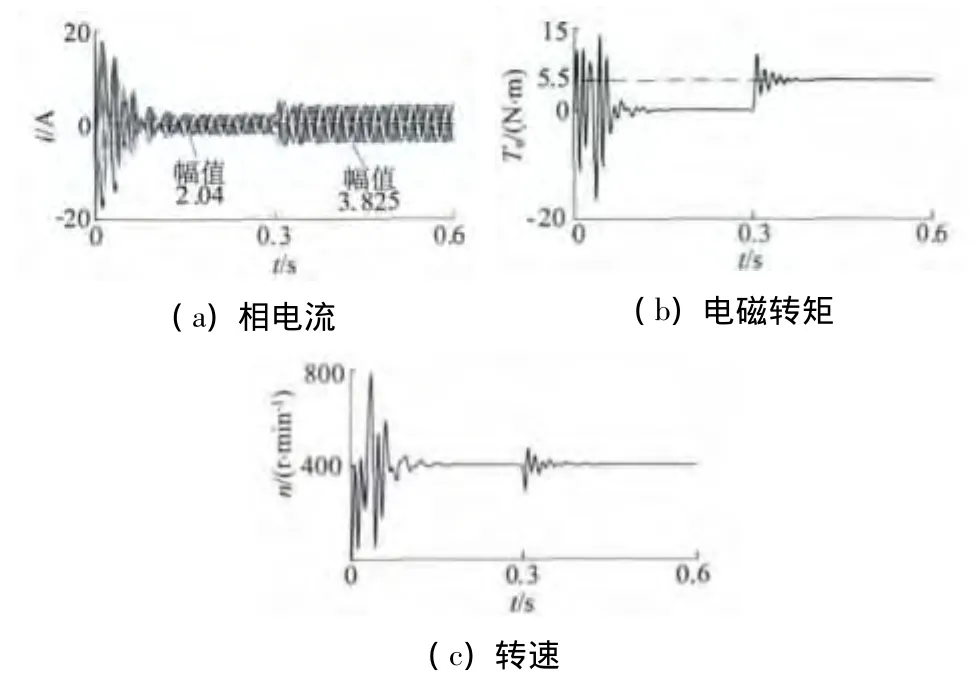
图5 电机饱和模型相电流、电磁转矩和转速
3 结 语
本文通过有限元分析获得电机d,q轴电感与电流的非线性关系,分析了双三相永磁同步电动机d,q轴交互磁饱和的机理。考虑交互磁饱和仿真模型,能够准确反映双三相永磁同步电动机磁路饱和状态下的运行特性,弥补了不饱和模型的不足。本文所采用的建模方法简单直观,同样适用于其他非线性模型的建立。
[1]李崇坚.交流同步电机调速系统[M].北京:科学出版社,2006.
[2]齐歌.双三相永磁同步电动机交互饱和模型与特性研究[D].武汉:华中科技大学,2010.
[3]黄进.p对极n相对称系统的变换理论[J].电工技术学报,1995,(1):53-57.
[4]ZHAO Yifan,LIPO T A.Space vector PWM control of dual three-phase induction machine using vector space decomposition[J].IEEE Transactions on industry applications,1995,31(5):1100-1109.
[5]熊邺,方大纲,刘铁军.电磁场数值计算中的内插和外推[J].电波科学学报,2002,17(4):325-329.
[6]杨金波.双三相永磁同步电机驱动技术研究[D].哈尔滨:哈尔滨工业大学,2011.
[7]李景灿,廖勇.考虑饱和及转子磁场谐波的永磁同步电机模型[J].中国电机工程学报,2011,31(3):60-66.
[8]景巍,谭国俊,叶宗彬.考虑磁场饱和效应的凸极同步电动机建模[J].电机与控制学报,2010,14(10):94-99.
猜你喜欢
上海大中型电机(2021年2期)2021-07-21
防爆电机(2020年6期)2020-12-14
防爆电机(2020年5期)2020-12-14
防爆电机(2020年3期)2020-11-06
哈尔滨铁道科技(2020年4期)2020-07-22
电子制作(2019年23期)2019-02-23
电子制作(2017年1期)2017-05-17
照明工程学报(2016年3期)2016-06-01
电测与仪表(2016年2期)2016-04-12
云南电力技术(2015年2期)2015-08-23