
基于CAN总线多模块有源电力滤波器并联控制
2014-01-15 09:33肖贞仁席自强
湖北工业大学学报 2014年2期
肖贞仁,席自强,周 苗
(湖北工业大学电气与电子工程学院,湖北 武汉430068)
在实际有源滤波工程中,有需要容量达到500A以上的大容量系统,由于电力电子器件等因素的限制,单台APF的容量有限,难以满足负载谐波电流的补偿要求。可以采用多台APF并联,通过分布式并联控制方式完成谐波和无功电流的输出,更易实现扩展和冗余;并联系统各模块完全相同,它们的地位均等,通过模块间CAN总线交换信息,产生各模块共享的参考信号,并通过环流对参考信号进行校正,实现均流控制[1]。
CAN(Controller Area Network)即控制器局域网络,通过对通信数据进行编码,实现网内节点个数不受限制以及使不同的节点同时接收相同的数据等优点,因此非常适用于分布式并联系统。
本文采用Concerto F28M35x芯片构成数字控制通讯系统,基于DSP的控制子系统只负责算法运算,没有其他的负担,从而保证了控制算法运算的可靠性和时效性。基于Cortex-M3的主机子系统负责各柜体之间以及柜体与后台监控之间的通讯。
1 Concerto F28M35x的结构
F28M35x的控制子系统以带浮点处理器的DSP为基础,与C2000系列器件兼容。此系统包含多个控制外设,如PWM模块、捕捉模块、编码器接口以及用于高级控制和基带信号处理应用的串行接口,可支持IEEE754单精度浮点操作。灵活的增强型ePWM能够以最小的CPU占用生成复杂的脉宽波形。
控制子系统所要实现的功能包括:基于dq坐标变换的指定次谐波检测;基于电压外环电流内环的双闭环控制;基于规则采样法的SPWM脉冲发生;
主机子系统是基于Cortex-M3内核,具有通信所需的高级连接外设;包括以太网、移动USB,特别是独有的双CAN结构。主机子系统需要实现的功能包括:有源电力滤波器与触摸屏的通讯;各模块与远程控制系统的通讯;有源电力滤波器的保护与容错;
2 基于CAN总线的通讯与远程监控设计
2.1 模块间通信的硬件设计
基于CAN总线的通讯与远程监控系统通过采集各模块网络节点的电流、电压、频率、温度等实时数据,对是否过流、过热关机、功率和功率因素等数据进行计算,然后将这些数据和状态信息存储在数据存储器中,通过CAN总线传送至监控台的上位机。上位机接受到网络节点传送的测量值和信息后,以曲线、图形等方式显示出来,操作人员就可以随时看到有源电力滤波器的运行参数[2]。数据经过处理后,显示各种参数的状态;上位机进行遥控操作时,将控制命令通过CAN总线发送到指定的网络节点,在网络节点实现相应的控制,达到控制的目的。整个有源电力滤波器多模块并联的控制与通讯结构见图1。
图1中的触摸屏支持CAN 1939和CAN-open两种协议,用户可通过触摸屏执行各种操作命令,方便地浏览输入、输出、负载等相关参数及波形,及时获得有源电力滤波器各模块当前的状态和告警信息。

图1 有源电力滤波器多模块系统通讯结构
2.2 CAN总线与微处理器通信单元模块的连接
F28M35x芯片含有独特的内嵌式双CAN控制器,通过收发器即可实现此节点与总线的接口联结。收发器SN65HVD232D是TI公司生产的CAN协议控制器和物理总线的接口芯片,为CAN控制器提供差动接收能力。CAN总线与Concerto通信模块的接法见图2。

图2 CAN总线与Concerto通信模块的连接
3 基于CAN总线相位同步与均流控制设计
通过CAN总线消除由有源电力滤波器输出电压差别引起的环流,该方案充分利用了CAN总线通信速率高、抗干扰能力强的特点,在有源电力滤波器并联系统中通过数字方法进行均流。各模块采样同步总线信号,在任意工作频率点和频率变化过程中自动实现同频、同相;同步的相位信号与幅值信号相组合生成同步的三相正弦基准信号[3]。采样并计算三相环流信号,然后注入到三相正弦基准信号中,对正弦基准信号进行校正,减小两模块的输出误差。
3.1 相位同步控制原理
有源电力滤波器通过数字锁相环实时地为采样点提供相应的相位信息,这个相位信息一方面参与谐波检测算法计算,另一方面提供有源电力滤波器并网相位同步。将单台有源电力滤波器的相位信息用方波表示,生成各台有源电力滤波器自身的同步方波信号,并通过CAN总线在所有有源电力滤波器模块之间交流;各台有源电力滤波器检测方波信号,根据相互之间的相位差控制正弦基准信号相位同步[4];图3为同步电路原理图。

图3 相位同步电路原理图
其中方波信号sw1、sw2分别为有源电力滤波器模块一、模块二生成的自身同步信号,经过OC门输出环节后送到同步总线,经过线与逻辑后的输出信号sw*也为方波,其上升沿与各输入信号上升沿中最晚的相对应,下降沿与各输入信号下降沿中最早的相对应。因此,共享的方波同步信号sw*与各模块自身的同步信号swn的关系如式(1)所示:

并联运行过程中,有源电力滤波器各模块根据自身的同步信号sw1和共享的基准同步信号sw*差值,对频率进行调节,使各模块方波的上升沿出现在同一时刻,从而实现同步控制功能。
3.2 改进型均流控制方案设计
在均流调节中,各模块通过采样并计算环流信号,对自身的正弦基准信号进行补偿,减小各有源电力滤波器输出之间的差异,实现输出均流。图4所示为二台有源电力滤波器的平均电流电路原理图及均流调节原理。图中,i为有源电力滤波器输出电流;is为采样信号;inav为各模块共享的平均电流信号;uref为正弦电压基准信号;uref*为经过均流调节后的正弦基准信号;Δi为有源电力滤波器计算得到的环流信号;kβ为均流调节系数[5]。
图4中,通过电流互感器采样有源电力滤波器的输出电流i,采样信号is通过电阻R接到均流总线,参与生成平均电流信号inav;求差电路可以求出i1s和inav的差值,得到环流信号Δi,再经过隔离放大处理后,注入到三相正弦基准信号中对uref进行校正,以减小两台有源电力滤波器之间的输出误差,实现均流控制。以A相为例,由图得到i、inav、Δi的表达式如下:
其中km是电流采样系数。两台有源电力滤波器并联的接法见图5。
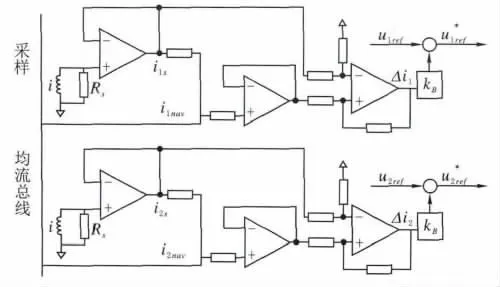
图4 两台有源电力滤波器均流调节原理
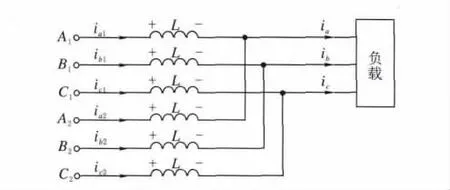
图5 两台有源电力滤波器并联模型
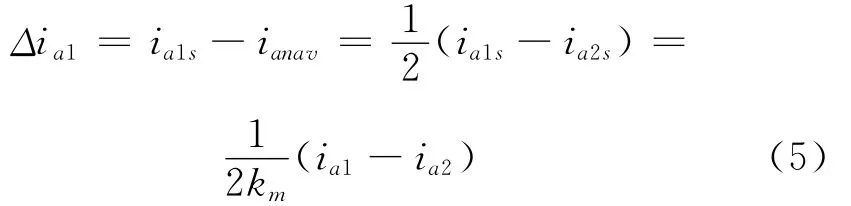
图5 中,ia1、ib1、ic1和ia2、ib2、ic2为两模块的输出电流,ia、ib、ic为并联系统输出电流。以A相为例:
本文中的有源电力滤波器采用SPWM调制法,采用U/f控制,正弦基准信号幅值正比于输出频率f,令比例系数为kα。加入均流调节后可得:
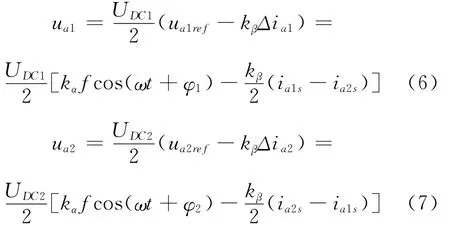
式(6)、(7)中:ua1、ua2分别为有源电力滤波器模块一和模块二的三相桥臂输出电压;ua1ref、ua2ref分别为模块一和模块二的三相正弦基准信号;UDC1和UDC2为两台有源电力滤波器的直流母线电压;φ1和φ2为其输出电流相位差。由图5可得到:
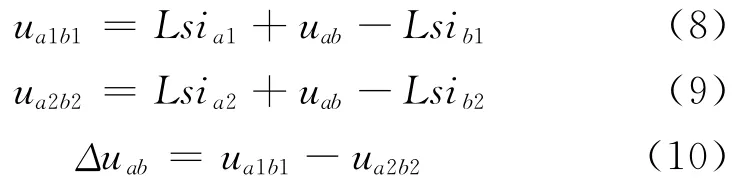
其中ua1b1、ua2b2是A1、B1和A2、B2端的端电压;uab为并联系统输出a、b端的端电压;s为拉普拉斯算子。
综合式子(6)、(7)、(8)、(9)、(10)得:
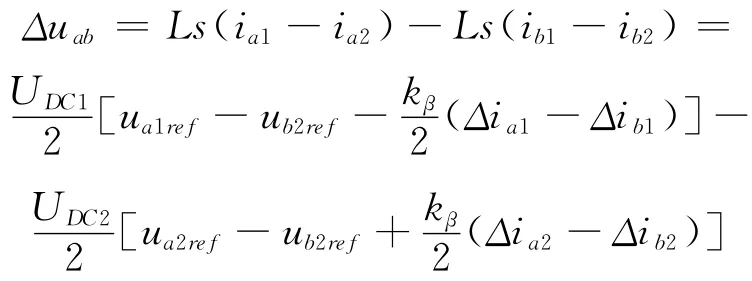
可解出得:

将ua1ref、ua2ref的表达式带入式(11)中,可得:
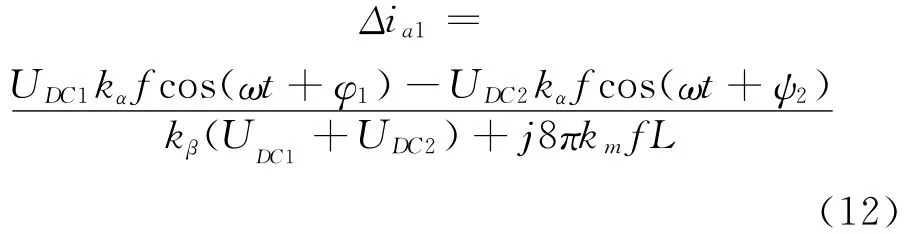
结果表明:两模块的环流正比于比例系数kα。实际有源电力滤波器并联系统中,当通过相位同步使得相位差为零,且kα、L、km为常数,通过调节均流系数kβ,可以实现对环流的控制,所提出的均流控制策略是有效的。
4 实验模型及结果
本文设计并实现了基于两台有源电力滤波器模块的并联补偿系统。主电路功率开关器件采用IPM模块(三菱PM75RL1A120)。负载采用整流桥带电阻负载。负载电流谐波畸变率THD=29.4%,谐波主要集中在6n±1特征次谐波上。图6为有源电力滤波器模块一谐波电流输出波形。
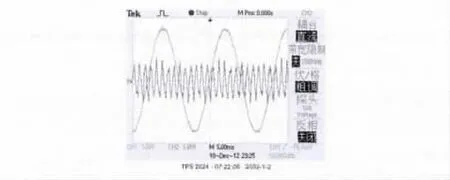
图6 有源电力滤波器模块一谐波电流输出波形
图7为有源电力滤波器模块二谐波电流输出波形;通过比较发现,两模块的输出电流大小和相位相等。
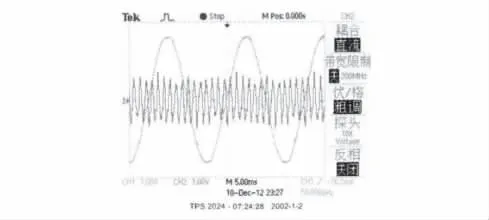
图7 有源电力滤波器模块二谐波电流输出波形
5 结论
本文研究了基于CAN总线的同步与均流策略,详细描述了有源电力滤波器各模块间的通信结构,并在其基础上完成二台有源电力滤波器样机的并联运行调试。通过波形的表示形式可知,二台有源电力滤波器样机产生的谐波和无功电流的相位与幅值相等,补偿后的谐波畸变率低。
[1] 刘威葳,丁洪发,段献忠.有源电力滤波器选择性谐波电流控制策略[J].中国电机工程学报,2011,31(27):14-20.
[2] 雷 一,赵争鸣,鲁思兆.LCL滤波的光伏并网逆变器有源阻尼与无源阻尼混合控制并联型有源电力滤波器的电流控制[J].电力自动化备,2012,32(11):23-27.
[3] 王要强,吴凤江,孙 力,等.阻尼损耗最小化的LCL滤波器参数优化设计[J].中国电机工程学报,2010,30(27):90-95.
[4] 丁士启,帅智康,罗 安.一种新型注入式混合有源电力滤波器[J].电工技术学报,2012,27(01):202-209.
[5] Dannehl J,Fuchs F,Hansen S,et al.Investigation of active damping approaches for PI-based current control of grid connected pulse width modulation converters with LCL filters[J].IEEE Transactions on Industrial Application,2010,46(04):1 509-1 517.
猜你喜欢
新高考·高三数学(2022年3期)2022-04-28
中学生数理化·中考版(2021年10期)2021-11-22
中学生数理化·高一版(2018年6期)2018-07-09
通信电源技术(2018年3期)2018-06-26
中国环境监察(2016年7期)2016-10-23
中学生数理化·高二版(2016年9期)2016-05-14
通信电源技术(2016年1期)2016-04-16
通信电源技术(2016年5期)2016-03-22
火控雷达技术(2016年3期)2016-02-06
广西文学(2015年9期)2015-10-24
