
基于数码相机的草地植被盖度测量方法对比研究
2014-01-02 11:37陈祖刚巴图娜存徐芝英胡云锋
草业学报 2014年6期
陈祖刚,巴图娜存,徐芝英,胡云锋*
(1.中国科学院地理科学与资源研究所,北京100101;2.中国科学院大学,北京100049)
植被盖度是指样地中全部植物个体地上部分(包括叶、茎、枝等)的垂直投影面积占样地总面积的百分比[1]。植被盖度是表征生态系统植被群落生长状况及生态环境质量的重要指标[2]。植被盖度对于分析和评估植物生长态势、土壤侵蚀强度及生态系统服务功能等有着重要作用,是评估土地退化、盐渍化和沙漠化的有效指数[3]。
在草地植物群落野外调查中,传统的草地植被盖度测定方法有目测法、方格法、点测法、仪器测量法、遥感解译法[1,4-5]等多种方法。目测法简单快捷,但受个人主观因素影响较大[1,6],章文波等[4]的研究指出其最大绝对误差可达40%。方格法有较高的精度,但是手工工作量大,效率较低[6]。点测法是用应用概率统计学原理而形成的盖度估算技术,但实践表明这种方法依然费时费力,精度也并不理想[1,7]。仪器法需使用购置专门设备仪器,如空间定量计(spatial quantum sensor)和移动光亮计(traversing quantum sell)等,经济成本较高,且野外携带和操作均不方便[1,8]。卫星遥感反演算法仅能估算出大尺度区域上的草地盖度[9],需要尺度转换后才能与小尺度样地上的植被盖度测量成果进行比对分析。
2000年后,数码相机迅速普及,科研人员开始应用数码相机和图像处理技术开展草地盖度测量[10-13]。已经就其中的若干关键处理技术,如相片中心投影畸变纠正、绿色像素识别、测量精度平差和校验等进行了广泛研究,例如,Luscier等[6]借助遥感影像处理软件eCognition做了植被盖度测量实验;宋雪峰等[12]利用Photoshop吸管工具提取绿色植被像元测量了植被盖度;张学霞等[14]针对中心投影引起的边缘畸变进行了探讨;贾建华等[15]分析了青藏高原地表数字照片的颜色特征,并采用超绿算法和K均值聚类算法开发了植被盖度自动提取软件。
基于数码相机的盖度测量方法操作简单,自动化程度高,计算结果较为精确,但是不能满足野外考察实时获取测量结果与其他遥感参数产品作校验对比分析的要求[16-17],研究人员获取的只是某一草地块的某一时刻的样方照片,并未考虑诸如光照强度和草地盖度本身变化对测量结果的影响。2010年以来,随着新一代移动智能设备(如iPhone/iPAD或各类Android Phone/PAD)的快速发展和普及,数码相机、GPS及笔记本电脑等传统设备得以综合集成。最先进的PAD和智能手机拍摄到的相片不仅能够记录GPS经纬度、温湿度、拍摄方向和水平倾仰角等重要环境背景信息,而且还可以在移动设备上实时处理、计算得到植被覆盖度、产草量等关键参量,甚至可以进一步通过GPRS、3G、WIFI等通信网络与互联网、云存储、云计算等服务连接起来,形成更广阔的应用领域。因此,在野外考察中运用各类移动智能设备拍摄草地样方照片的同时,同步计算草地植被盖度,并与有关遥感反演参数产品对比校验,这将成为地学移动测量、天地一体化研究的重要发展方向。
为此,本研究首先设计了模拟野外考察和草地盖度测量真实状况的35种应用场景,并使用智能平板设备在北京奥林匹克公园人工草地上完成了草地样方拍摄工作;应用RGB阈值法、HSV判别法和RGB决策树法等3种盖度测量方法,对草地植被盖度测量成果进行了对比研究,对影响测量精度的关键因素进行了分析。
1 材料与方法
1.1 实验方案
为反映野外考察和植被盖度测量时的真实情形,特别是考虑到测量结果可能随盖度变化而形成非线性响应,同时考虑到太阳光照角度、光照强度对数码相片的影响,本研究设计了1个同时考虑植被盖度变化和太阳光照变化的实验方案。
植被盖度变化包括5个水平,即低覆盖(0~10%)、中低覆盖(10%~20%)、中等覆盖(20%~30%)、中高覆盖(30%~50%)、高覆盖(50%~80%);太阳光照变化则囊括夏季野外工作的7个主要时段,从早上6:00(6 AM)到下午6:00(6PM)、每隔2h一次,具体为6AM、8AM、10AM、12AM、14PM、16PM 和18PM 共7次太阳光照环境。
2013年10月初,在北京市朝阳区奥林匹克森林公园(116.3873°E,40.0056°N)内的人工绿地内,使用华硕(ASUS)的Eee Pad TF101平板电脑,进行了上述实验方案规定的5(盖度水平)×7(时段)共35种场景的草地样方拍摄,草地样方大小为32cm×25cm。
为控制拍摄效果、实时处理相片和计算样方植被盖度,作者使用Java语言在Android平台上开发了基于RGB阈值法、HSV判别法和RGB决策树法等3种测量算法的应用软件。软件在相片获取过程中,调用Android平板的GPS接收机、方向感应器和重力感应器等接口,以便得到GPS位置、方向以及水平俯仰角等信息。安装上述软件模块后,平板电脑在野外拍摄的同时,可同步得到上述3种不同算法所得的植被盖度测量值。
1.2 测量算法
1.2.1 RGB阈值法 为了将代表植物活体的绿色像素和代表土壤、枯死植物及阴影的其他像素区分开,可应用数码相片中表征颜色的R、G、B三个通道值来提取绿色植被。具体模型如下:
式中,G、R、B分别代表数码相片上绿、红、蓝组分的数值;x是临界阈值,它随相片亮度变化而不同,一般在30~45之间。满足上述模型的像素即被识别为草地植被,并用于计算草地植被盖度。张云霞等[18]使用该模型在内蒙古自治区锡林郭勒盟锡林浩特市、阿巴嘎旗、西乌珠穆沁旗开展了研究,并认为RGB阈值法与借助图像处理软件的目视解译法精度相当。
1.2.2 HSV判别法 图像学研究已经指出,RGB颜色空间中的R、G、B三个分量与亮度相关,亮度改变会导致3个分量同时改变。为避免亮度改变所导致的不确定性,可以采用HSV颜色空间模型(hue,saturation,value,即色调、饱和度、亮度)。因此,通过对H(色调值)规定一定的值域空间,可以同样提取得到绿色植被斑块。具体模型如下:
式中,H代表色调,S代表饱和度,V代表亮度;绿色调对应H值的范围是60~180[19]。在计算机图像学中,H、S、V的值可以由RGB值经过一定的数学模型转换得到[20]。Richardson等[10]使用该模型在已知大小的苗床上,依次放置16个已知面积的圆形草坪草(turfgrass)簇,测得的盖度值和真实值的相关系数为0.99。
1.2.3 RGB决策树法 这是一种在RGB简单阈值模型基础上发展而来的新技术。该方法依然使用数码相片中的RGB三通道模型,但对于R、G、B三个通道值之间的复杂组合进行了细致甄别。
理论上,该模型不仅能够区分出绿叶、黄叶、带颜色的花朵等植被活体类型,还能区分出枯枝落叶、土壤、砾石等非植被活体类型。章超斌等[1]应用该方法在新疆准噶尔盆地东南缘的阜康市荒漠草原区开展研究,认为所得植被盖度最大偏差的绝对值不超过5%,精度在95%以上。
2 结果与分析
2.1 测量结果
为了对机器识别、模型算法测得的草地盖度进行精度分析,首先需要获取样方植被区域,并进一步计算得到草地盖度参考值[21]。为此,作者使用Photoshop提供的魔棒工具,通过传统的目视解译、植被斑块勾勒方法获取了全部相片的植被斑块(含叶、枝、茎),并继而计算得到盖度参考值。与此同时,依托RGB阈值法、HSV判别法、RGB决策树法等3个算法模型,由平板电脑及相应的草地盖度测量软件计算出相片盖度值。由于同一盖度下存在7个不同时段的相片,因此可以针对每一个盖度进一步计算出测量盖度均值及其方差(表1)。

表1 草地样方及植被盖度Table 1 Grass samples and vegetation coverage
2.2 精度分析
以目视解译法获取的盖度参考值为横坐标,以RGB阈值法、HSV判别法、RGB决策树法等3种方法所得值为纵坐标,作散点图并作线性回归。具体结果如图1所示。
从回归斜率看,3条回归线的斜率均小于1,即3种方法均存在低估现象。其中,RGB阈值法和HSV判别法的回归线斜率较高,分别为0.668和0.680,即有着相对更高的估算精度;RGB判别树法回归斜率仅为0.232,估算精度最差。从散点分布状况以及R2大小来看,RGB阈值法和HSV判别法中,各散点较密集分布在回归线两侧,决定系数R2大于0.9,这表明测量值与参考值之间的一致性较好;但在RGB决策树法中,各个散点距离回归线较远,决定系数R2较小,仅为0.62左右,这表明测量值与参考值之间差异较大。从回归截距上看,RGB阈值法和HSV判别法的截距接近于0,而RGB决策树法的截距为0.53948,这表明RGB决策树法在植被低覆盖度区域存在严重的高估现象。
总体而言,RGB阈值法和HSV判别法估算盖度的精度较高,而RGB决策树法估算盖度的精度较低。
2.3 不同盖度对测量精度的影响
为分析不同模型算法对于草地植被盖度变化的敏感性,本研究以植被盖度参考值为横轴,以测量误差(盖度测量值与参考值的差)为纵轴,对同一盖度水平、不同时刻相片获得的测量值进行统计(测量误差的均值和方差),并在Origin中作图(图2)。
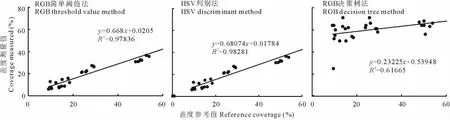
图1 植被盖度测量值与参考值的相关关系Fig.1 Relationships of coverage measurement values and reference values
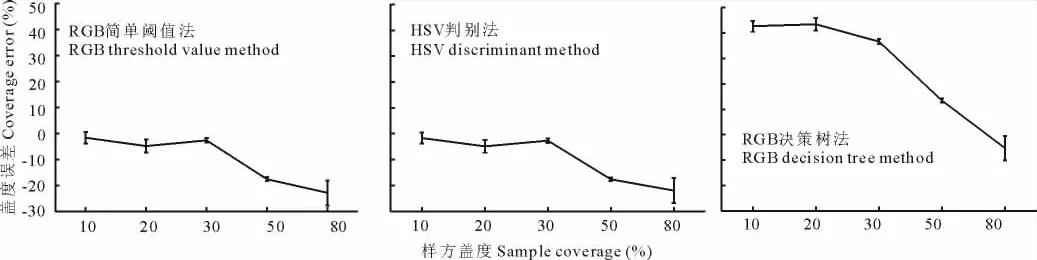
图2 不同盖度下照相测量值的变化Fig.2 Change of photograph measurement values of different coverage
由图2可见,RGB阈值法和HSV判别法,随着参考植被盖度的增加,误差绝对值呈增大趋势,但在30%参考植被盖度时误差减少,结合50%和80%参考盖度草地样方中非绿色茎较多,30%盖度草地样方植物茎较少的事实,判定测量绝对误差主要受样方中非绿色植被成分多少的影响,而随盖度增加无明显的变化规律;其方差也无明显的变化规律。对于RGB决策树方法,随着参考植被盖度的增加,其测量误差逐步减小,从42.71%减少到-5.29%;其方差无明显的变化规律。
综上所述,RGB阈值法和HSV判别法的测量精度随参考植被盖度的增加无明显的变化规律;RGB决策树法的测量误差随参考植被盖度的增加而减小,即测量精度随参考植被盖度的增加而提高。
2.4 不同光照对测量值的影响
为分析不同盖度测量模型对于不同光照角度、光照强度变化的敏感性,本研究以照相时间(代表了不同的光照角度和光照强度)为横轴,以盖度测量值为纵轴,将5个盖度水平的测量值序列分别作图(图3)。
图3中,从早上到中午、再到晚上,随着光照强度的先增加、后减少,光照角度的先增加、后减小,RGB阈值法所得测量值在时间序列上大致呈现一个碗口向上的U形分布,即早上和傍晚其测量值更高,而中午其测量值更低;这一规律对于具较低植被盖度样地(低盖度样地、中低盖度样地)更为明显。与RGB阈值法结果类似,HSV判别法所得测量值在时间序列上也同样呈现为一个碗口向上的U形分布,且这一规律对于具较低植被盖度样地(低盖度样地、中低盖度样地)更为明显。与前两者均不同,RGB决策树方法所得测量结果在时间序列上的变化规律不明显,甚至在对低盖度草地样地测量过程中,还出现了1次奇异值。

图3 不同时段下照相测量值的变化Fig.3 Change of photograph measurement values in different time
综上,随着光照强度、光照高度的增加,RGB阈值法和HSV判别法所得测量结果会随之减小;反之,即随着光照强度、光照高度的降低,RGB阈值法和HSV判别法所得测量结果会随之增高。但是光照环境对于RGB决策树方法的影响不显著。
3 讨论
3.1 精度规律产生原因分析
为探究其成像规律以及误差形成过程,将基于3种方法处理后的图像进一步处理分析,即保留识别的植被像素,去除非植被像素(设为白色背景值),观察其识别区域,进行比较分析。
由图4可见,RGB阈值法、HSV判别法和RGB决策法均能有效识别图像中的绿色植被像元;其中,RGB阈值法和HSV判别法能够较好剔除土壤背景,而决策树法却无法很好剔除土壤背景;因此,前2种方法的盖度识别精度较后者高。RGB决策法具有识别紫色根茎功能[1],图中因背景土壤颜色与紫色根茎颜色较为相近,因此决策树法无法剔除土壤。土壤背景颜色不同是本研究和以往研究的不同之处,也是本研究得出的精度数据和以往研究不同的重要原因。
3.2 盖度和光照变化规律产生原因分析
RGB阈值法和HSV判别法能够有效识别所有盖度样方中的绿色植被,并剔除非绿色背景,因此其测量精度受到盖度变化影响较小。而RGB决策树法将土壤误判为绿色植被,因此其测量精度与样方中土壤面积相关,受到盖度变化影响较大。样方植被盖度越高,则样方中土壤面积越小,因此误判面积越小,精度越高。
基于相同盖度样方,随光照强度增强,RGB阈值法和HSV判别法所测盖度值逐渐减小。其原因是在弱光条件下,一些非植被像元因像素值在RGB颜色空间下R、G、B分量值均较小以及数码摄像头在像元像素值产生时的误差,其R、G、B分量符合RGB阈值法G>R,G>B,G(30~45)的判别规则,被误判为植被像元,故其测量盖度值较大;而在强光条件下,这些非植被像素颜色值呈现其真实值,R、G、B分量值较大,因此不再被误判,其测量盖度值较小。可以把这种现象称为植被像元的扰动判定。同理,在弱光条件下,一些暗色调非植被像元由于数码摄像头产生像元像素值时的误差,其像素值在HSV颜色空间下H分量符合60°<H<180°的条件(这时候V分量很小),被误判为植被像素,其测得的盖度值较大;当光照强度增加后,这些像素值不再符合判定条件,误判像元减少,测得的盖度值减小。RGB决策树法随光照强度的变化其测得的盖度值无明显的变化规律,其主要原因可能是光照强度的变化对土壤以及其他颜色的背景的扰动判定和对绿色植被的扰动判定作用结果相互抵消,导致总体变化规律的不确定性。确切的原因有待于进一步的研究。

图4 原图及3种方法识别的绿色植被区域Fig.4 Origin photo and the green vegetation areas recognized by three measurement methods
4 结论与展望
本研究在总结梳理既有植被盖度测量方法的基础上,设计了35种模拟野外考察和植被盖度测量的情景,并应用RGB阈值法、RGB决策树法、HSV判别法3种盖度测量方法,对基于数码相机草地植被盖度的测量流程、测量精度、草地盖度变化、光照强度变化开展对比研究。主要结论有:
1)RGB阈值法和HSV判别法精度较高,RGB决策树法对非高盖度草地样方的测量精度较低。
2)RGB阈值法和HSV判别法的测量精度不受草地样方本身盖度变化的影响;RGB决策树法的盖度测量精度随着草地样方盖度的增加而提高。
3)RGB阈值法和HSV判别法测量的盖度值随光照强度的增大而减小,随光照强度的减弱而增大;而RGB决策树法测量的盖度值随光照强度的变化无明显规律。
总的来看,RGB阈值法和HSV判别法在计算机算法实现上简单、易实现,总体精度较高,对光照环境的相应呈现规律性变化,因此在今后的深入研究中值得进一步优化。而RGB决策树方法的计算机算法相对复杂,总体精度却未见改善。
本研究还发现,不管是RGB阈值法、还是HSV判别法、抑或是RGB决策树法,单纯地从颜色判别(尤其是绿色像素)角度来计算植被盖度,这显然具有局限性。这样的技术路径很难将非绿色调的茎、枝、花等植被组成有效识别出来,同时也可能将一些背景要素误判为植被,这是当前盖度测量方法误差的主要来源。在未来研究中,一方面可以进一步改进植被像素的识别方法,特别是要建立随盖度变化、光照环境变化的阈值自适应模型,这是继续使用RGB颜色空间或者是HSV颜色空间开展精确的植被盖度测量的一个重要途径。另一方面也可以考虑从图形统计学出发,通过图像边缘检测、聚集分析、图形自动匹配等手段,另辟蹊径,通过识别植被不同组成的形状,由此计算植被盖度。
[1]章超斌,李建龙,张颖,等.基于RGB模式的一种草地盖度定量快速测定方法研究[J].草业学报,2013,22(4):220-226.
[2]秦伟,朱清科,张学霞,等.植被覆盖度及其测算方法研究进展[J].西北农林科技大学学报(自然科学版),2006,34(9):163-169.
[3]顾祝君,曾志远.遥感植被盖度研究[J].水土保持研究,2005,12(2):18-21.
[4]章文波,符素华,刘宝元.目估法测量植被覆盖度的精度分析[J].北京师范大学学报(自然科学版),2001,37(3):402-408.
[5]Smitha M O,Ustin S L,Adamsa J B,etal.Vegetation in deserts:I.A regional measure of abundance from multispectral images[J].Remote Sensing of Environment,1990,31(1):1-26.
[6]Luscier J D,Thompson W L,Wilson J M,etal.Using digital photographs and object-based image analysis to estimate percent ground cover in vegetation plots[J].Frontiers in Ecology and the Environment,2006,4(8):408-413.
[7]胡健波,张璐,黄伟,等.基于数码照片的草地植被覆盖度快速提取方法[J].草业科学,2011,28(9):1661-1665.
[8]Thalen D C P.Ecology and Utilization of Desert Shrub Rangelands in Iraq[M].Hague:Kluwer Academic Publishers,1979.
[9]White M A,Asner G P,Nemani R R,etal.Measuring fractional cover and leaf area index in arid ecosystems:digital camera,radiation transmittance,and laser altimetry methods[J].Remote Sensing of Environment,2000,74(1):45-57.
[10]Richardson M D,Karcher D E,Purcell L C.Quantifying turfgrass cover using digital image analysis[J].Crop Science,2001,41(6):1184-1188.
[11]池宏康,周广胜,许振柱,等.草地植被盖度的近距离遥感测定[J].草业学报,2007,16(2):105-110.
[12]宋雪峰,董永平,单丽燕,等.用数码相机测定草地盖度的研究[J].内蒙古草业,2004,16(4):1-6.
[13]张清平,章山山,陈露,等.应用 WinCAM软件判识分析草坪盖度[J].草业科学,2010,27(7):13-17.
[14]张学霞,朱清科,吴根梅,等.数码照相法估算植被盖度[J].北京林业大学学报,2008,80(1):164-169.
[15]贾建华,胡勇,刘良云.青藏高原数字照片植被覆盖度自动算法与应用[J].地球信息科学学报,2010,12(6):880-884.
[16]陈梦蝶,黄晓东,侯秀敏,等.青海省草原鼠害区域草地生物量及盖度动态监测研究[J].草业学报,2013,22(4):247-256.
[17]孙成明,刘涛,田婷,等.基于 MODIS的南方草地NPP遥感估算与应用[J].草业学报,2013,22(5):11-17.
[18]张云霞,李晓冰,张云飞.基于数字相机、ASTER和 MODIS影像综合测量植被盖度[J].植物生态学报,2007,31(5):842-849.
[19]包全磊.基于 HSV 空间的彩色图像分割[J].软件导刊,2010,9(7):171-172.
[20]李长勇,曹其新,郭峰.基于主色直方图特征匹配的蔬果分类方法[J].上海交通大学学报,2009,43(12):1888-1903.
[21]Zhou Q,Robson M.Automated rangeland vegetation cover and density estimation using ground digital images and a spectralcontextual classifier[J].Remote Sensing,2001,22(17):3457-3470.
猜你喜欢
林业勘查设计(2022年1期)2022-02-15
乡村科技(2021年17期)2021-10-20
安顺学院学报(2021年4期)2021-09-16
黑龙江工程学院学报(2020年5期)2020-10-21
林业调查规划(2020年3期)2020-06-03
水土保持研究(2019年6期)2019-10-19
成都信息工程大学学报(2019年3期)2019-09-25
电子制作(2018年16期)2018-09-26
绿色科技(2017年15期)2017-09-01
中央民族大学学报(自然科学版)(2016年4期)2016-06-27
