基于水弹性力学的SWATH船结构振动与噪声分析
2013-12-13 09:15:00叶永林吴有生邹明松倪其军
船舶力学 2013年4期
叶永林,吴有生,邹明松,倪其军
(中国船舶科学研究中心,江苏 无锡214082)
1 引 言
小水线面双体船(SWATH)具有独特的水动力船型,其耐波性能非常优秀,适合作为远洋科学考察的平台。在海洋环境中航行时,波浪和船上机械设备均会引起船体振动,包括总体振动与局部振动,需要引起足够的重视。过大的振动会导致局部结构的疲劳失效、设备故障,以及影响乘员的舒适性[1]。且如果作为海洋科学考察船,过大的振动会影响船上的试验,同时产生的结构噪声,也会影响到其声学测量系统的性能。
水弹性力学分析方法[2-3],是把流场和结构的运动与变形作为一个完整的系统来进行分析。可应用解决的问题涉及各类船舶结构在波浪激励、砰击与甲板上浪下的稳态和瞬态响应;海洋工程结构物的运动、外载荷、承载能力、波激振动、疲劳、可靠性与安全性的评估[4-5];水中结构在流场中的振动与噪声辐射[6]、水翼的颤振、水下爆炸及快速运动结构出入水的瞬时冲击响应;各类薄壁储液结构和容器的晃荡、管道或管群的涡激振动等。
本文采用线性三维水弹性理论,对波浪中船体在机械激励下的强迫振动特性与水下噪声进行了分析。对于结构振动,文献[7]尝试了采用水弹性力学方法进行计算零航速工况时的局部振动。分析可以采用文献[8]所介绍的软件。本文预报了航行工况的振动响应,包括下潜体与工作甲板的结构振动响应。结果与实船测试结果进行了比较,结果表明该预报方法合理、可行。同时,利用声介质中的三维船舶水弹性分析方法,对该船的水下噪声进行了分析,其中6 kns航速的分析结果与测试值进行了对比,结果比较吻合。说明该方法可适用于水面船的噪声预报,具有较强的工程性。同时,对零航速时的近场噪声与辐射噪声也进行了预报,以考察其在进行相关试验时的声学噪声环境。
2 三维水弹性力学理论
假定船舶在波浪中作微幅运动和变形,根据模态叠加的原理,船体结构相对其平衡位置的运动和变形可以表达为:

其中:pr(r=1,2,…,m)表示相对于第r阶船体干模态位移的主坐标分量。

式中:{p}={p1(t),p2(t),…,pm(t)}为广义主坐标列阵,[a]、[b]和 [c]分别为结构广义质量矩阵、广
(1)式中的主坐标pr满足广义线性水弹性力学运动方程:义阻尼矩阵和广义刚度矩阵;[A]、[B]和[C]分别为广义流体附加质量矩阵、广义流体附加阻尼矩阵和广义流体恢复力矩阵;{F}、}、{△}和{G}为广义波浪激励力、广义静态力、广义集中力和广义体积力列阵。
其中,广义集中激励力{△}可以表示为:

当外部激励力为简谐力时,有

3 SWATH船及主要激励源
3.1 船体主要参数
该SWATH船的图片见图1,其主要技术参数见表1。
3.2 船上主要激励频率
该船采用综合电力推进系统,螺旋桨及主机柴油机、推进电机的激励频率为:
a.螺旋桨轴频率:250 r/min(全速)、163 r/m(巡航速度)
激励频率:250/60=4.167 Hz;1 630/30=2.717 Hz
b.螺旋桨叶频率:250×6=1 500 r/min;163×6=978 r/min
激励频率:1 500/60=25 Hz;978/60=16.3 Hz
c.推进电机激励频率:推进电机转速与螺旋桨转速一致,故激励频率也相同。
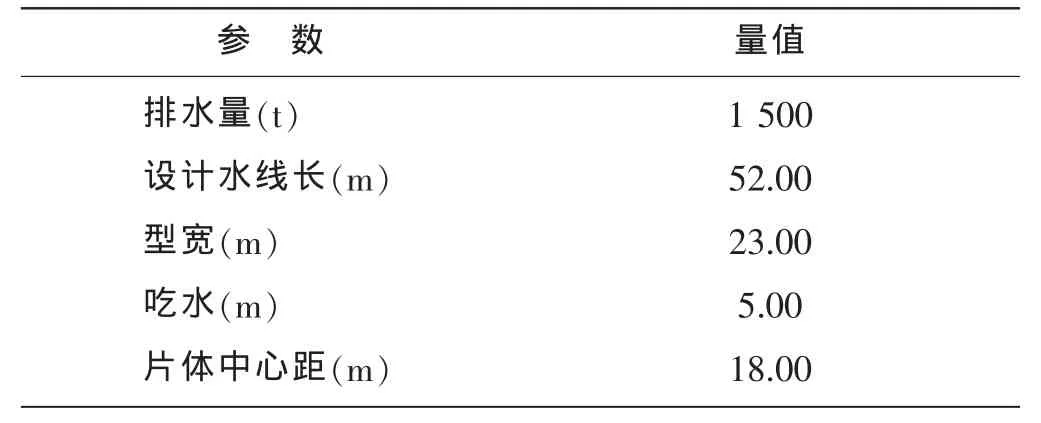
表1 SWATH船体主要参数Tab.1 The principle dimensions of the SWATH ship

图1 1 500 t SWATH海洋科考船Fig.1 The 1 500 t Ocean-Survey SWATH ship
4 SWATH船总体振动分析
船舶湿模态与船舶航向、航速和波频有关,且并不正交,故在水弹性理论中,不把湿模态作为分析的广义基函数,而选用船舶在空气中的固有振型作为模态叠加的广义基函数。在水弹性分析中,前六阶为刚体运动模态,后续模态为弹性变形模态。首先进行船舶干结构的有限元分析。鉴于船体具有左右对称的特性,只对半个船体进行了有限元建模(图2)。模型共有52 196个单元,包括29 889个板单元、10 283个梁单元和12 024个集中质量。
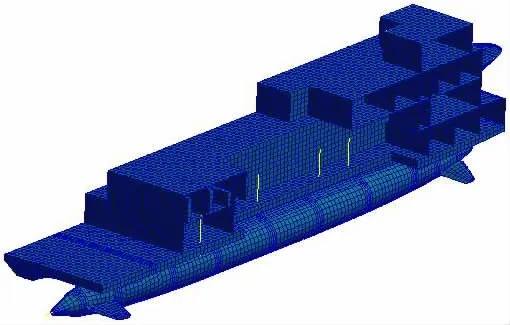
图2 船体有限元模型(左舷)Fig.2 The FEM model of the port part of the ship
4.1 干模态
根据模态的对称特性,为减小计算量,结构干模态按对称与反对称分开计算,挑选模态时,需要考虑总体模态,以及关心区域的局部模态。
因为总体模态与局部模态是人为分工的,考察时按其整体变形或节点变形情况进行分开,实际总体模态与局部模态可能是同一模态。考虑结构局部模态时,根据GL(2001)建议,局部振动的考查范围重点10-50 Hz频率段。本文根据SWATH船型特点,重点考查后甲板10-100 Hz范围内的局部结构振动。
为准确反应结构振动特性,共提取171阶弹性干模态,频率范围为0~116 Hz。在此频率范围内,总体模态比较集中在较低频率范围内,部分典型总体模态如下:
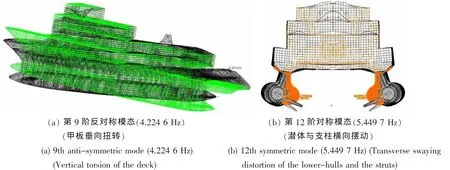
图3 干船体典型总体模态Fig.3 Typical overall mode shapes of the SWATH ship
4.2 水动力特性
图4、图5分别是该试验船在水中的附加质量和阻尼。由图4可见,在波浪中的船体有一定的附加质量,对船体结构的响应会产生影响,尤其是第12阶振型模态,其附加质量比较大,达到船体质量的10-2~10-1量级,因此总体振动计算时,考虑附连水的影响是必要的。同时,可以看到,仅在低频段(1 Hz以内)波浪频率对船体的附加质量影响较大,频率较大(大于1 Hz)时,附加质量趋于稳定。由图5可知,阻尼仅在1 Hz以内有一些波动,频率较大(大于1 Hz)时,将逐步趋于零。
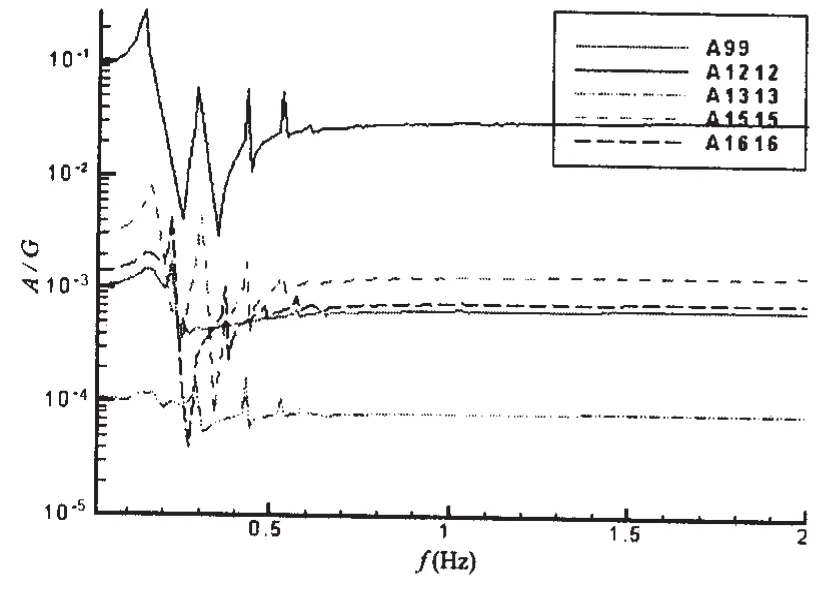
图4 附加质量Fig.4 Additional mass

图5 阻尼Fig.5 Additional damp
4.3 湿谐振频率
船体响应的主坐标频率,即湿谐振频率见图6。
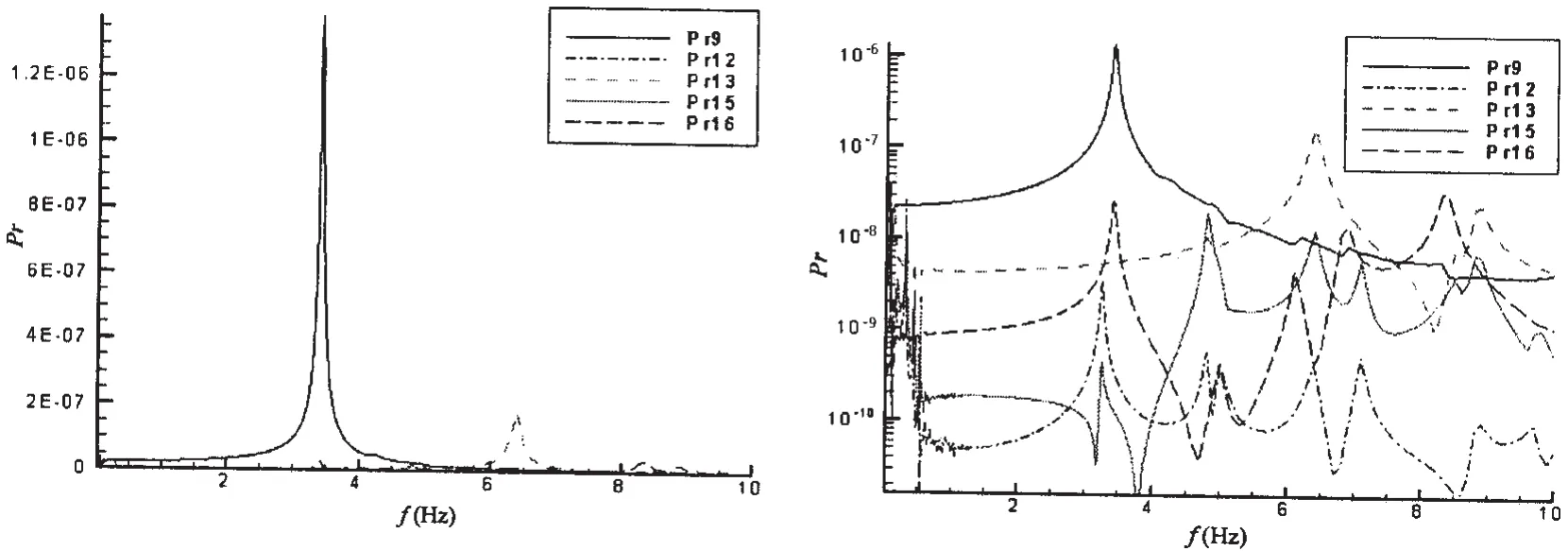
图6 主坐标响应Fig.6 Principal coordinate response
根据机械设备激励频率与上述湿船体固有频率,可以发现,设备激励与船体固有频率之间有一定的间距,不会激起船体结构总体振动。
5 船体结构强迫振动分析
船舶航行时,主要受到波浪激励、机械激励及螺旋桨的激励。SWATH船耐波性好,首阶湿谐振频率较大,且船体尾部不受桨的表面力作用。本文仅考查二甲板作业区的振动情况,此处主要考虑受柴油发电机的激励下的垂向结构振动。
5.1 局部振动分析区域
根据前述位置提取局部模态,在低频率部分,多数与总体模态相同,在60 Hz以后,节点垂向位移较大,提取出来的模态数量相对较多一些,可能与结构模型的精细度有关。
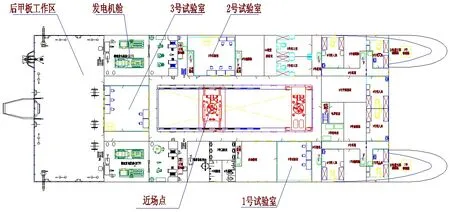
图7 二甲板:发电机与工作区域位置布置图Fig.7 Second desk:locations of the generations and work zone
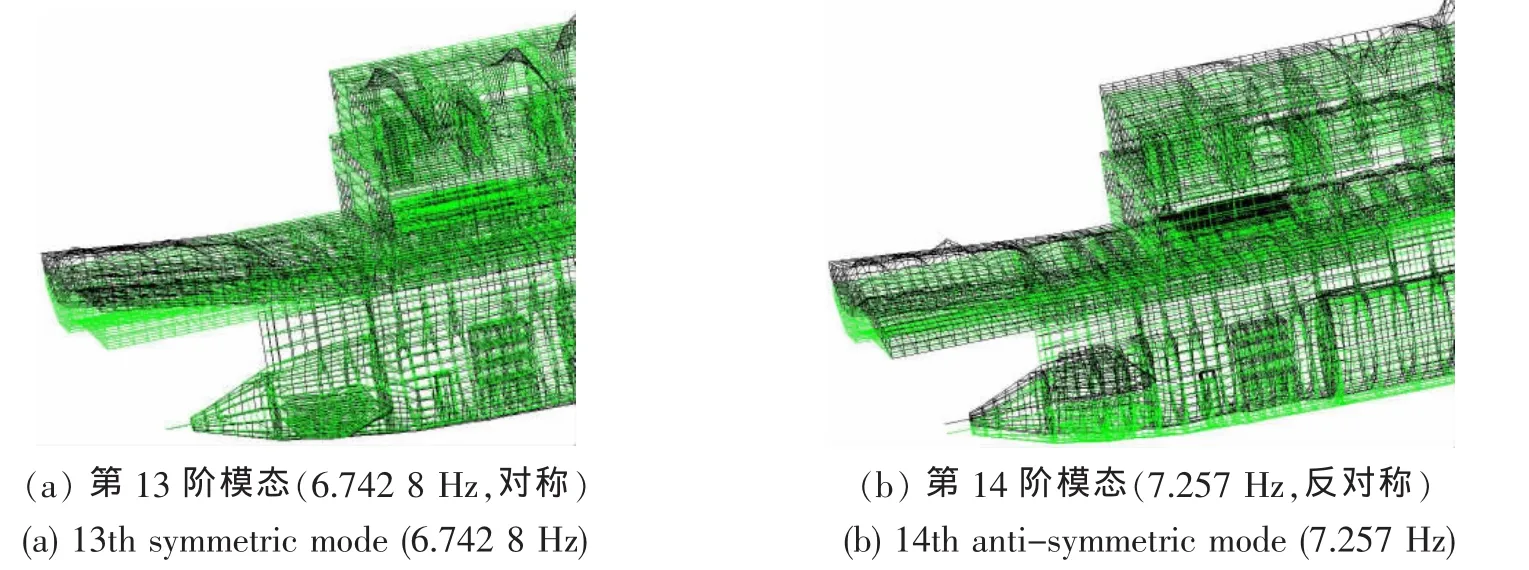
图8 干船体典型局部模态Fig.8 Typical local mode shapes of the SWATH ship
5.2 机械激励力
为了计算柴油发电机对船体的激励力,对发电机的基座振动进行了测试。测试时,每台发电机单独开启,同时测量发电机基座与关心节点的振动加速度。
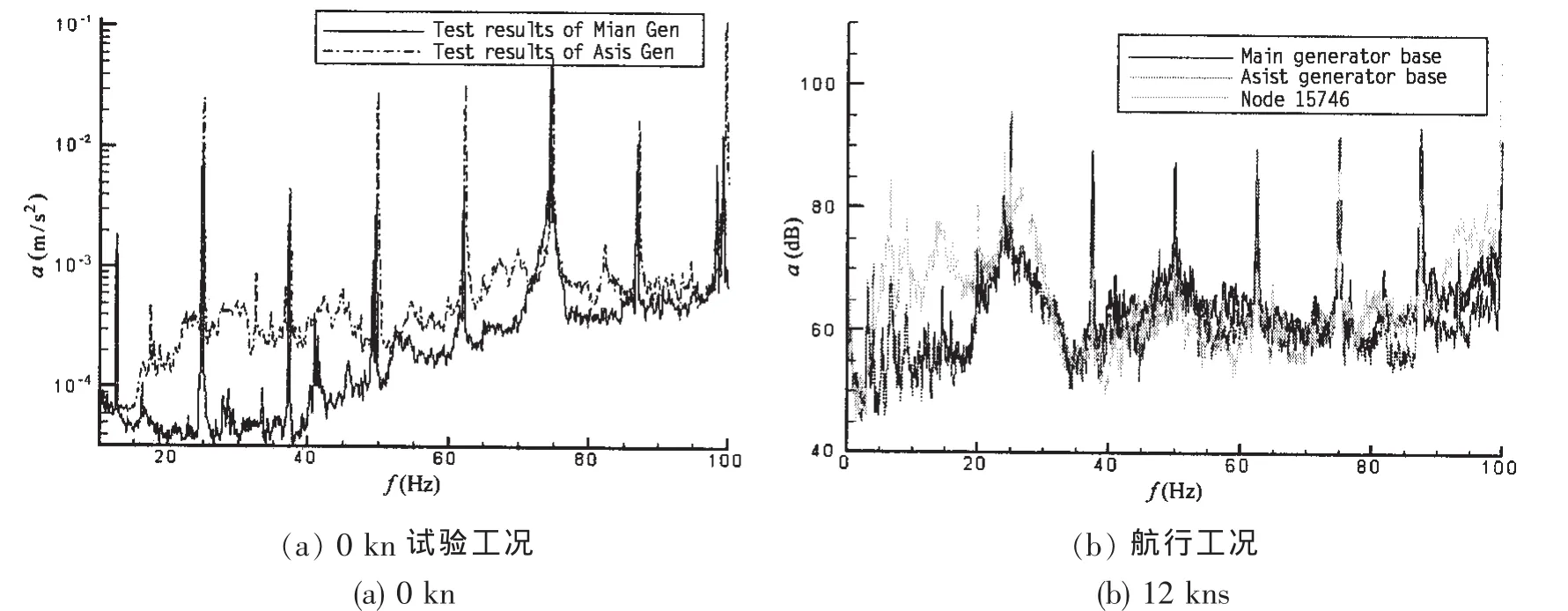
图9 主、辅助发电机处实测加速度[9]Fig.9 Test results of the acceleration values of the main generator and the assistant generator[9]
发电机的激励力F通过以下公式计算:
其中:ZΦ为基座有效输入机械阻抗为基座阻抗,大小为单位正弦力作用下的基座节点速度的倒数,考虑到浮筏基座面板上支承多个隔振器,因此需要求得浮筏基座的有效输入机械阻抗。
主发、辅发的等效激励力为:
同样,在主机、辅机基座上分别施加垂向单位正弦激励力,并求解(2)式中的广义水弹性力学运动方程,可分别得到基座在单位垂向力作用下的垂向位移
5.3 航行工况下的局部振动
当船舶航行时,求解非稳态流场速度势的移动脉动源Green函数表示形式为[6]:
由图4可以明显看出,经过退火处理后,薄膜的上转换荧光强度较未经过退火处理的样品相比,上转换荧光强度明显增强,这说明薄膜经过退火处理后,可以有效的提高薄膜内部的结晶度。

式中:φ0(X,Y,Z,k)=exp[ kZ+jk(Xcosθ+Ysinθ)]

航行时船体二甲板所受激励力,可根据该节点的实测加速度与设备基座加速度的对比来分析,如图9(b)。由该图可见,二甲板的局部振动频率响应特征,主要受到发电机组的激励影响。因此,对二甲板上的局部振动问题进行分析时,采用发电机组作为激励源是合理的。
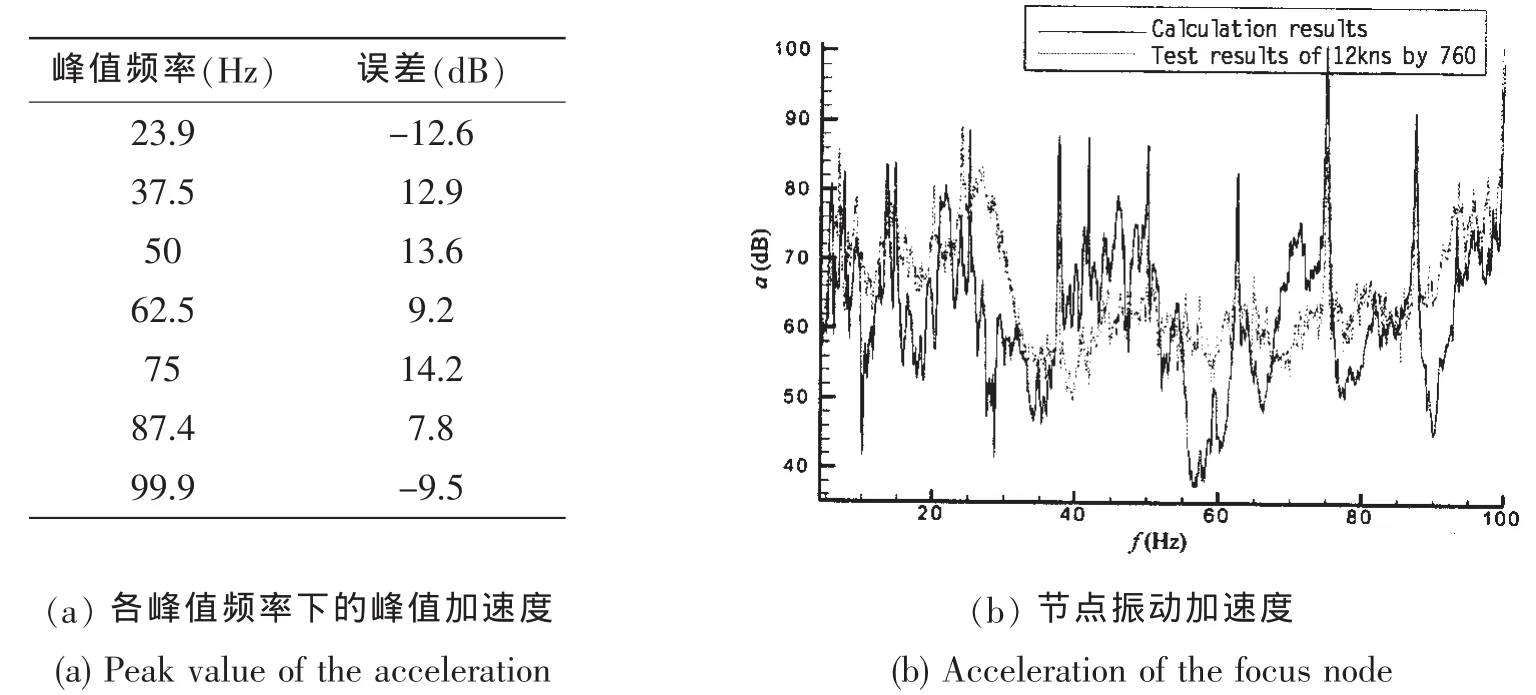
图10 航行(12 kns)时二甲板艉部节点振动计算与实测对比[9]Fig.10 Comparison of calculation results and test results of the node vibration response at main desk produced by the main generator at 12 kns
为计算船体任意节点在机械激励下的振动响应,可先计算单位激励下的节点位移、加速度,然后倍乘上述等效激励力。采用在关心节点上施加如(4)式所述的单位正弦激励力,求解(2)式,可得到节点在机械激励力下的强迫振动的主坐标响应等,再根据实船在试验工况下所测试出的发电机基座加速度(见图9),按上节所述方法所计算得出的激励力作为发电机的激励力,可求得局部振动结果,见图10。
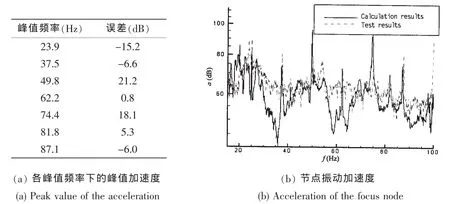
图11 航行(12 kns)时潜体外侧节点振动计算与实测对比Fig.11 Comparison of calculation results and test results of the node vibration response on the sub-hull produced by the main generator at 12 kns
同时,本文对下潜体结构振动作了分析。图11为该船航行时下潜体振动预报结果。分析该节点振动时,考虑到推进电机工作时会对结构产生激励,采用了柴油发电机组与推进电机作为激励源,以其航行时的实测加速度换算为激励力。
总的来说,在航行中二甲板与潜体结构的局部振动加速度计算结果与试验结果吻合,响应频率均能一一对应,振动响应加速度幅值误差也较小。振动加速度满足中国船级社的相关要求[11]。
6 结构噪声分析
6.1 声介质中水弹性力学频域分析方法[5]
假定浮体周围为可压理想声介质。辐射速度势满足带航速的自由液面声学边界条件为:

其中:ω为作用在浮体上外载荷的激励角频率。引入与该自由液面条件相适应的频域脉动Green函数为:

其中:k=ω/c0为流体中声波波数。
辐射势可用平均湿表面¯S及水线C上的源汇分布边界积分方程表示:

声介质中广义水弹性力学运动方程可表示为如下形式:

流场中的辐射声压可表示为:

如果浮体是扁的或狭的或细长的结构,略去浮体对均匀稳态流场的扰动,此时有:

可得:

本文分析零航速及6 kns航速航行时机械激励引起的结构噪声,包括近场噪声与辐射噪声。航速大于10 kns时,流体噪声的影响较大,本文不作分析。
6.2 航行时的近场噪声与辐射噪声分析
利用前述三维船体有限元模型,并对设备基座有限元模型进行了细化,计算了基座的机械阻抗。
SWATH船航行时,产生结构噪声的机械设备主要为发电机和推进电机。因此,本文考虑了主发电机、辅助发电机及推进电机的影响,激励力计算如5.2节所示。利用对应的基座振动加速度测试结果和上述基座的机械阻抗计算结果,可以计算出相应的设备激励力。
利用6.1节所述的水弹性分析方法,可以计算单位激励力作用下的流场中的辐射声压,考虑上述激励力,从而可以得到该船行时的辐射噪声和近场噪声。
在6 kns航速的工况下,对水深7.5 m,横向水平距离65 m的水下位置进行了辐射噪声的预报。图12为三种激励辐射声总能量三分之一倍频程谱级与测试值比较曲线。
图13为近场噪声计算结果。计算场点为水深5.29 m,重心后11 m处的纵舯面处。
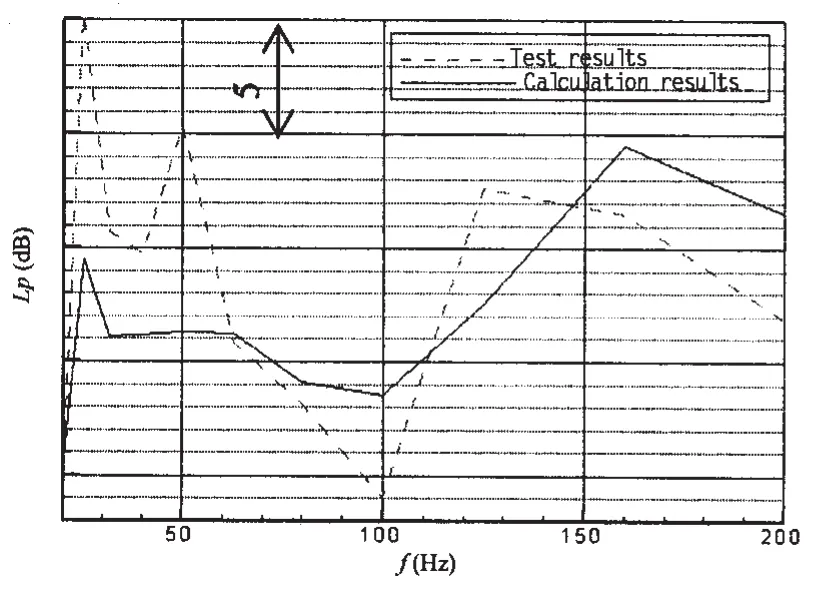
图12 辐射噪声1/3OCT谱级Fig.12 1/3OCT of the noise radiation
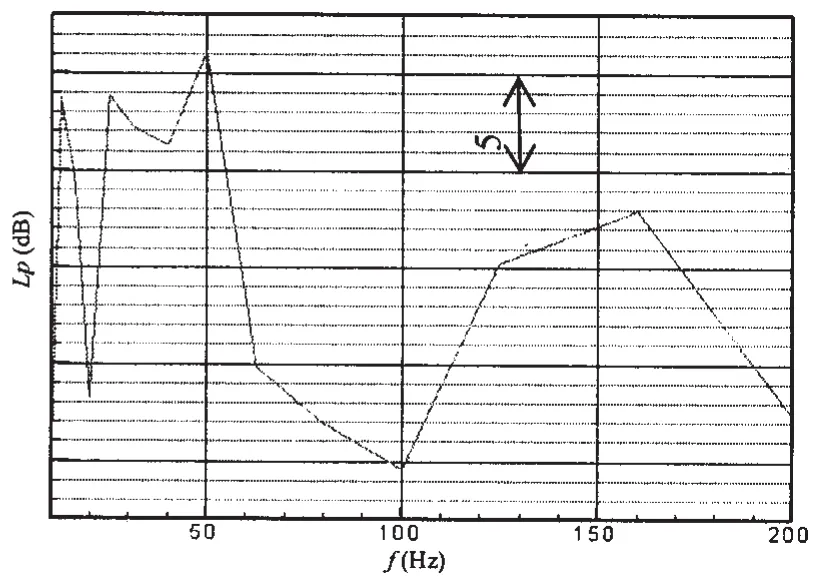
图13 近场噪声1/3OCT谱级Fig.13 1/3OCT of noise of the near field
由图12可见,数值预报结果与试验测试结果基本吻合,表明该预报方法基本可行。
6.3 零航速时的近声噪声与辐射噪声
采用上述方法,计算在零航速时相同位置的辐射噪声与近场噪声,此时推进电机停止工作,仅考虑主发电机与辅助发电机的激励。图14为辐射声总能量三分之一倍频程谱级曲线,图15为近场噪声计算结果。
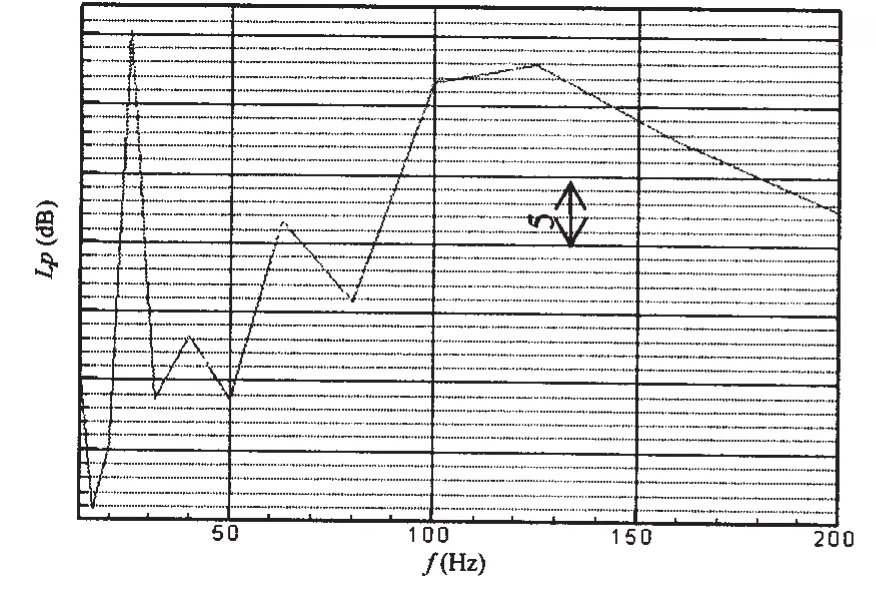
图14 辐射噪声1/3OCT谱级Fig.14 1/3OCT of the noise radiation
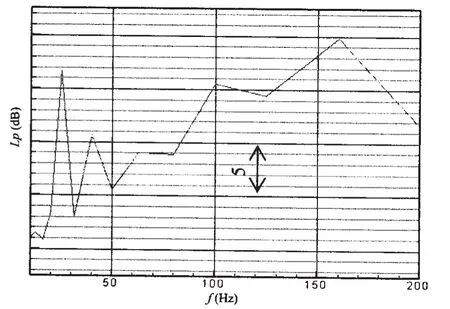
图15 近场噪声1/3OCT谱级Fig.15 1/3OCT of noise of the near field
由图15可知,静止时该船的近场噪声水平较小。由于零航速时,机械激励力较小,因此近场噪声与辐射噪声较小是合理的。
7 结 论
通过采用三维水弹性方法,利用三维有限元模型和模态叠加原理,将波浪与机械设备的激励力有效地结合,形成了航行中船体结构的强迫振动分析方法。该方法能有效地预报船舶在航行时的船体总振动谐振频率,为控制船舶设备引起结构谐振提供参考。同时,可以预报在发电机等机械设备引起的强迫振动下的船体局部振动情况,为船舶舱室及工作区的振动水平控制提供有力的参考。同样,利用三维水弹性方法,可有效地预报船体结构噪声。但该方法对有限元模型建模以及模态的选取等提出了比较严格的要求。
[1]朱石坚,何 琳.船舶机械振动控制[M].北京:国防工业出版社,2006.
[2]Wu Y S.Hydroelasticity of floating bodies[D].Ph.D.Thesis,London,Brunel University,1984.
[3]杜双兴.完善的三维航行船体线性水弹性力学频域分析方法[D].无锡:中国船舶科学研究中心,1996.
[4]崔维成,杨建民,吴有生,刘应中.水弹性理论及其在超大型浮式结构物上的应用[M].上海:上海交通大学出版社,2007.
[5]Ye Yonglin,Wu Yousheng,et al.Hydroelastic analysis of SWATH ship wave loads[J].Journal of Ship Mechanics,2010,14(12):1340-1348.
[6]Zou Mingsong,Wu Yousheng,Ye Yonglin.Three-dimensional hydroelascity analysis of acoustic responses of ship structures[C]//9th International Conference on Hydrodynamics,October 11-15,2010.Shanghai,China,2010:844-851.
[7]叶永林,吴有生,等.水弹性力学在SWATH船体结构振动响应分析中的应用研究[J].船舶力学,2011,15(5):506-512.Ye Yonglin,Wu Yousheng,et al.Research on application of hydroelasticity method to vibration response analysis of the SWATH ship hull[J].Journal of Ship Mechanics,2011,15(5):506-512.
[8]金建海,叶永林,田 超,等.三维水弹性集成软件的设计与实现[J].船舶力学,2011,15(5):521-529.Jin Jianhai,Ye Yongling,Tian Chao,et al.Design and implementation for 3D hydroelasticity integrated software[J].Journal of Ship Mechanics,2011,15(5):521-529.
[9]席亦农,叶永林,等.SWATH船结构振动检测报告[R].无锡:中国船舶科学研究中心检测报告,2011.
[10]熊草根,等.SWATH船航行结构噪声检测报告[R].大连:中船重工第760研究所检测报告,2008.
[11]中国船级社.船上振动控制指南2000[M].北京:人民交通出版社,2000.
猜你喜欢
舰船科学技术(2022年20期)2022-11-28 08:19:52
疯狂英语·新读写(2021年6期)2021-08-05 07:49:10
防爆电机(2021年2期)2021-06-09 08:14:48
模具制造(2019年7期)2019-09-25 07:30:00
船舶标准化工程师(2019年4期)2019-07-24 07:21:16
中学生英语(2017年6期)2017-07-31 21:28:55
青年歌声(2017年6期)2017-03-13 00:57:56
焊接(2015年9期)2015-07-18 11:03:51
海军医学杂志(2015年2期)2015-02-27 13:47:42
中国舰船研究(2014年6期)2014-05-14 06:45:17