基于轴频电场的舰船主轴系故障诊断研究
2013-12-13 09:15:00毛伟,周萌,余刃
船舶力学 2013年4期
毛 伟,周 萌,余 刃
(海军工程大学a.船舶与动力学院;b.训练部,武汉430033)
1 引 言
目前在旋转机械故障诊断领域,普遍使用振动信号进行诊断,通过安装在旋转部件上的振动传感器测得振动信号,然后通过对信号进行分析从而诊断出故障,该方法已有很多较为成功的应用[1-3]。舰船的主轴是非常关键的旋转部件,如果该部件产生故障,不仅会影响舰船的战斗力,而且还不利于舰船的声隐身和电磁隐身,因此,对其进行故障诊断意义重大。但在使用振动信号对舰船主轴进行故障诊断过程中,由振动传感器输出的信号除了含有有用信号之外,同时也包含大量的由其它设备产生的噪声信号,而这些背景噪声往往属于非高斯有色噪声,有些可能在频谱上与被测信号的频谱相重叠,在这种情况下,就很难将有用信息从背景噪声中提取出来,从而影响故障诊断的效果。
本文针对这一问题,在对舰船主轴系这一旋转部件进行故障诊断时,采用了一种新的物理量-轴频电场来对主轴系三种典型故障进行诊断,采用该物理量可以保证测得的背景噪声为可以被去除的宽带信号,从而解决了背景噪声成分复杂、难以提取有用信号这一难题。文中对实验室条件下测得的某船模主轴的三种典型故障数据进行分析,能够准确区分出故障的类型,最后将一定幅值的实测背景噪声与实验数据相叠加,混合后的信号通过自适应线谱增强技术处理之后,依然能够成功诊断出故障类型,从而证明了该方法在实际应用中的价值。
2 轴频电场产生机理
舰船由不同的金属材料构成,如青铜质的螺旋桨和钢质的船壳,而不同种类的金属因其化学活动性不一样在海水中会产生不同的电极电位。因此,当铜制的螺旋桨和碳钢制的船壳浸泡在海水中形成闭合回路时,由于电极电位值不同,它们在海水中能维持一定的电位差,并且会因电化学反应使电极电位较低的钢质船壳不断溶解腐蚀,从而在海水中产生腐蚀电流。为了防止舰船船壳的腐蚀,除了采用涂层防腐外,现在普遍采用牺牲阳极阴极保护系统和外加电流阴极保护系统(ICCP),而这两种防腐系统均会在海水中产生电流。
不论是舰船不同金属结构之间因电化学反应产生的腐蚀电流还是采用阴极保护系统而外加的电流都会经海水从船壳流向螺旋桨,然后通过各种轴承、密封和机械线路从螺旋桨返回到船壳,如图1所示。此回路的电阻抗RB会随着螺旋桨轴承的旋转而发生周期变化,从而使流经海水的电流受到调制。这些时变电流产生的电磁波会以转轴转动的速率为基频并以谐波的形式由船体向外传播,从而产生舰船的极低频电场[4]。
因此,当舰船主轴系发生故障时,其对应的RB必将会随之发生变化,从而使产生的轴频电场发生相应的变化,这为通过轴频电场判断轴系故障提供了可能。另外,轴频电场在海水中的传播距离较远,衰减较慢[5],因此在距离舰船一定距离处测量得到的电场信号中,除了有价值的轴频电场之外,仅剩下海洋的背景电场这一宽带噪声了,这为故障诊断的可实施性提供了保障。
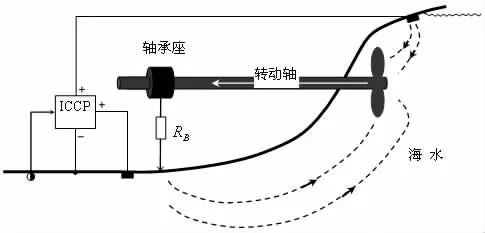
图1 轴频电场产生原理图Fig.1 Principle figure of producing shaft-rate electric field
3 舰船轴系碰摩力模型
舰船的主轴是非常关键的一个部件,主汽轮机发出的功率,由减速器大齿轮传出,通过各中间轴和尾轴,传给推进器,从而推动舰船运动。主轴的实质就是一个转子—轴承的基础系统,其简化后的转子系统模型如图2所示。
转子—轴承间的碰摩如图3所示。其中:pn为法向碰摩力;pt为切向碰摩力;ω为转子旋转角速度。
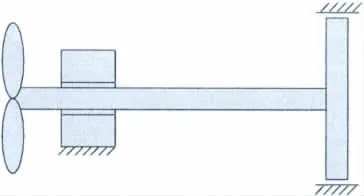
图2 简化后的主轴系转子—轴承示意图Fig.2 Simple sketch map of principal shafting rotor-bearing
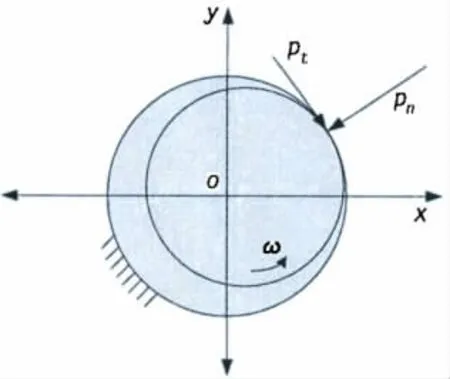
图3 转子—轴承间的碰摩模型Fig.3 Collide-friction model between rotor and bearing
当转子—轴承发生碰摩时,切向和法向碰摩力公式为:

在直角坐标系中,两个方向的碰摩力还可以表示为:

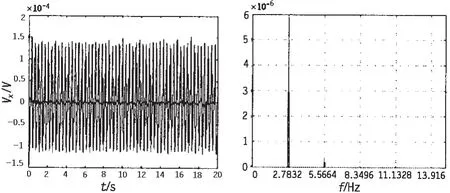
图4 正常状态下的轴频电场x分量Fig.4 Shaft-rate electric field Vxunder normal state
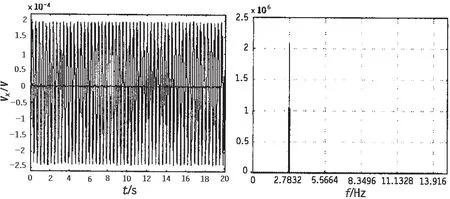
图5 故障1状态下的轴频电场x分量Fig.5 Shaft-rate electric field Vxunder fault 1 state
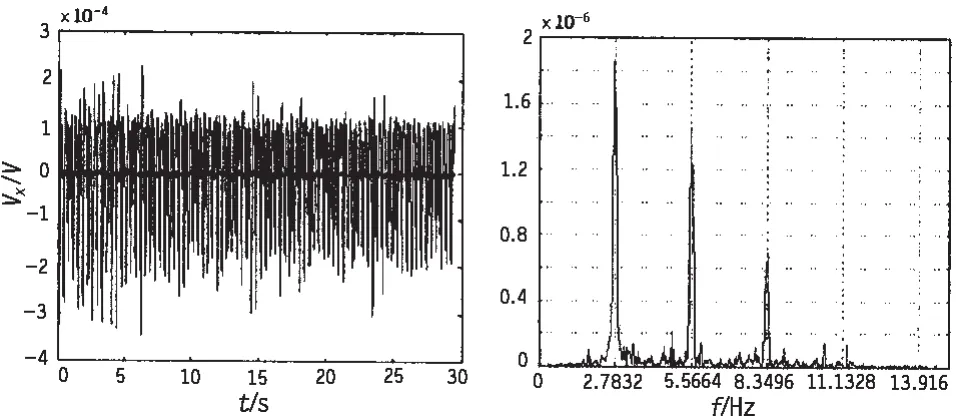
图6 故障2状态下的轴频电场x分量Fig.6 Shaft-rate electric field Vxunder fault 2 state
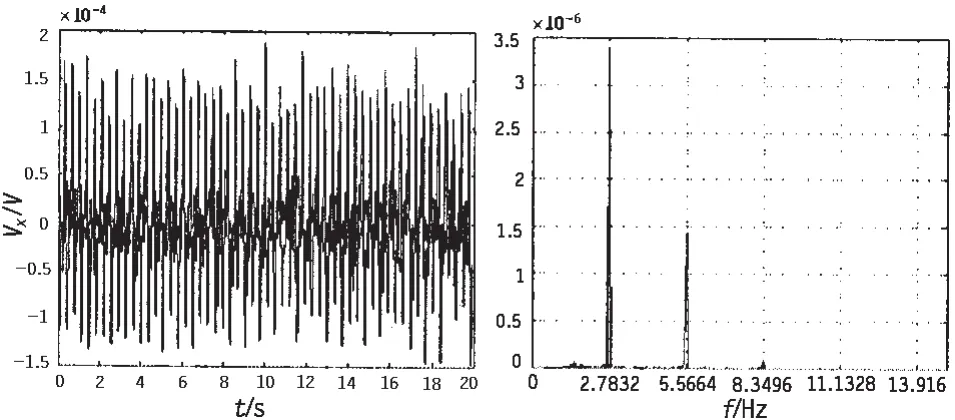
图7 故障3状态下的轴频电场x分量Fig.7 Shaft-rate electric field Vxunder fault 3 state
4 对实验数据的故障诊断
轴频电场的实测工作在实验室内利用船模在水池内完成,实验水池的长、宽、深分别为8 m、5 m、1.5 m,在水池中放入0.8 m深的水(模拟浅海环境),倒入海盐,测得其电导率为3.66Ω·m-1。
实验用船模依据某型舰船按比例缩小制造,船长为1 m,螺旋桨用黄铜制造,船壳的材料为普通钢板,并在船壳外面包了一层锌皮。轴频电场测量系统主要由传感器,信号调理电路和数据采集与处理系统组成,传感器、信号调理电路和A/D采样板之间用同轴屏蔽电缆进行连接。
在实验室条件下分别测量了轴系正常以及轴系可能出现的三种典型故障情况下的轴频电场数据。其中,正常状态的数据和数据的频谱如图4所示;故障1,转子—轴承间的润滑变差从而导致摩擦系数增大,即(1)式和(2)式中的F变大,测得的数据及数据的频谱如图5所示;故障2,由于转子长期摩擦可能导致质量损失不均匀,即产生了转子的不平衡质量,该故障通过在轴上焊接一个小铁块来模拟,测得的数据及数据的频谱如图6所示;故障3,转子中心点偏离轴承的中心点,即产生一定量的偏心量,测得的数据及数据的频谱如图7所示。图中深色信号为实测的实验室条件下的环境噪声。
通过对比正常和故障状态的信号以及对应的频谱,可以得出如下结论:故障1与正常状态相比其频谱变化不大,但采集的信号幅值变大了;故障2与正常状态相比,不但信号幅值变大了,而且其频谱也有了较大变化,其基频(基频为2.783 2 Hz,实验所采用的主轴转速为每分钟1 500/9转)的倍数频率处也出现了较大峰值(2倍基频,3倍基频);故障3与正常状态相比,在信号幅值上没有很大变化,但在频谱上有了相应的变化,其二倍基频处出现了较大的谱峰。由此,可以通过采集信号的幅值和频谱的一些特性将三种典型的主轴系故障区分开来。
5 加入实测背景噪声的故障诊断
由于在实际环境下,所测得的轴频电场信号总是被淹没在环境的噪声电场之中的,并且为了尽可能地去掉一些来自舰船自身且难以去除的信号,测量点往往选取离舰船较远的位置,这样就必然会造成所测得的信号信噪比较低。本文通过将实测的轴频电场信号与实测的背景噪声信号进行叠加来验证该方法在低信噪比情况下的有效性。
实测的环境噪声信号及其频谱如图8所示,可见背景噪声在各个频率上的功率谱密度都相差不大,是一个很典型的宽带信号。而舰船的轴频电场却是一个窄带周期信号(如图4所示)。为了便于比较这种混合信号中的有用信号的大小,在没有预知噪声参考信号的情况下,本文运用自适应谱线增强原理,采用归一化增益矢量的FTF算法对混入噪声的实验测量数据进行处理[6],顺利将窄带微弱轴频电场信号从宽带背景噪声中分离出来。
自适应线谱增强原理为:如果信号s(n)是一个窄带信号和一个宽带噪声的混合,由于窄带信号的自相关函数比宽带噪声的时间相关半径要短,因此当延迟时间Δ选为小于宽带噪声的时间相关半径而大于窄带信号的时间相关半径时,将使宽带噪声变得不相关,而窄带信号仍然相关,这样一来就可以将信号与噪声分离出来了。归一化FTF算法的具体运算流程参见参考文献[7]。

图8 环境电场噪声x分量Fig.8 Environmental electric field noise Vx
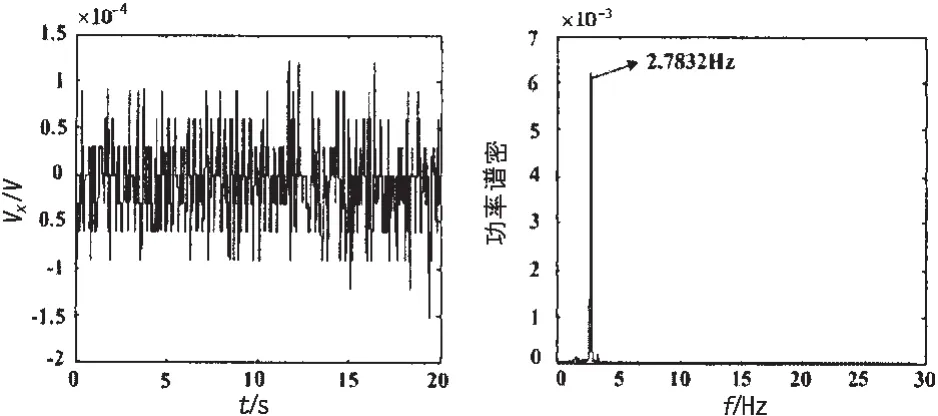
图9 正常状态下电场x分量处理结果Fig.9 The result of shaft-rate electric field Vxunder normal state
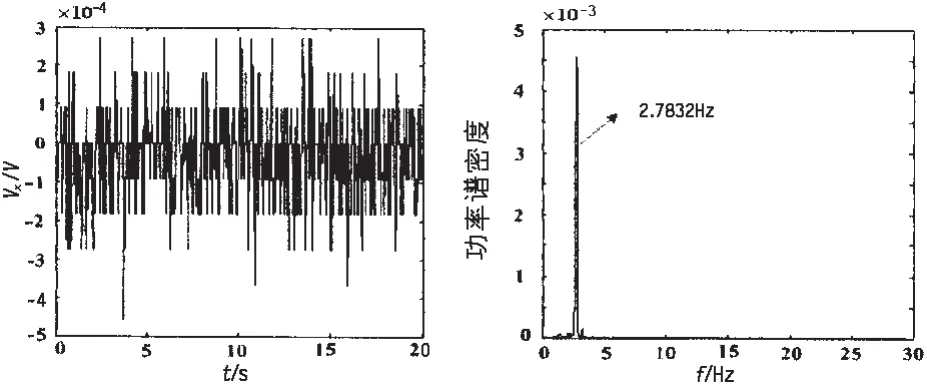
图10 故障1状态下电场x分量处理结果Fig.10 The result of shaft-rate electric field Vxunder fault 1 state
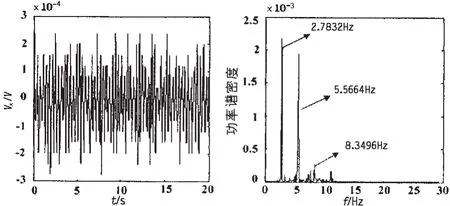
图11 故障2状态下电场x分量处理结果Fig.11 The result of shaft-rate electric field Vxunder fault 2 state
将图4-7的四组轴频电场x分量与图8所示的背景噪声相混合,调整背景噪声的大小将轴频电场信号完全淹没,将这些混合后的四组信号分别采用自适应线谱增强方法进行提纯处理,提纯后的信号分别如图9-12的左图所示,再将提纯后信号的频谱求出,分别如图9-12的右图所示。可见提纯后的信号在幅值和频谱上依然符合未加背景噪声的故障规律。
但从图11中可以看出,此时三倍基频(即8.349 6 Hz)附近已经出现了一些幅值较大的干扰峰,并且当所加的噪声信号较大时,故障模式2中的三倍基频将会被淹没,从而使其与故障模式3的频谱相似,这就会造成故障判断上的不确定性。因此,在使用该方法进行故障诊断时,测量点不要离被测舰船太远,只要使测量点处的背景噪声符合宽带特点即可,距离过远的话,会影响故障诊断的准确性和可靠性。
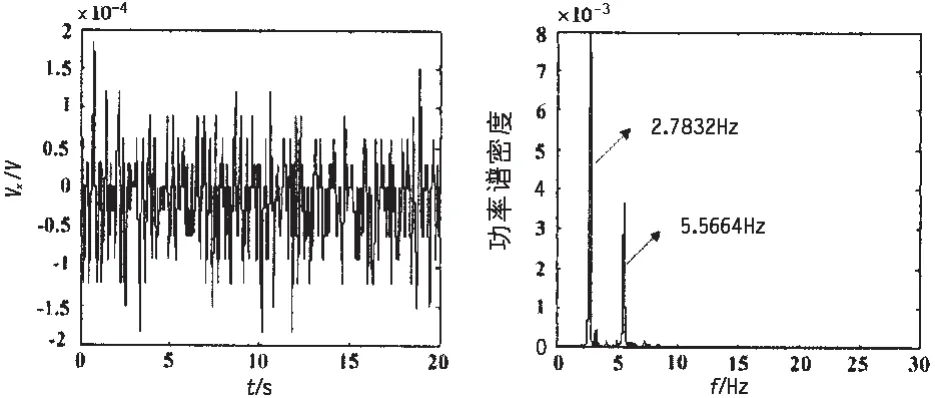
图12 故障3状态下电场x分量处理结果Fig.12 The result of shaft-rate electric field Vxunder fault 3 state
6 结 论
由于目前在旋转机械故障诊断领域,普遍使用振动信号进行诊断。在使用这些方法对舰船主轴系进行故障诊断时,由于在舰船舱室这一特定环境下,由振动传感器测量得到的振动信号除了含有判断故障所需要的有用信号之外,还包含大量的噪声信号,这些噪声成分复杂,并且很难通过信号处理方法进行去除,因此进行故障诊断的效果较差。针对这一问题,本文另辟蹊径采用了一种新的信号-舰船轴频电场-作为故障诊断信号,采用这一信号的优点是可以在距离舰船较远的地方进行测量,从而避开由舰船自身产生的一些难以去除的噪声信号,通过对实验数据的处理,表明使用轴频电场信号可以较为明确地将主轴系的三种典型故障区分开来,并且在将轴频电场信号与环境噪声信号进行混合之后,该方法依然有效,从而证明了本文方法的有效性。
[1]Antoni J.Fast computation of the kurtogram for the detection of transient faults[C].Mechanical Systems and Signal Processing,2007,21:108-124.
[2]苏文胜,王奉涛,张志新.EMD降噪和谱峭度法在滚动轴承早期故障诊断中的应用[J].振动与冲击,2010,29(3):18-21.Su Wensheng,Wang Fengtao,Zhang Zhixin.Application of EMD denoising and spectral kurtosis in early fault diagnosis of rolling element bearings[J].Journal of Vibration and Shock,2010,29(3):18-21.
[3]林 勇,周晓军,张文斌,等.基于形态小波理论和双谱分析的滚动轴承故障诊断[J].浙江大学学报(工学版),2010,44(3):432-439.Lin Yong,Zhou Xiaojun,Zhang Wenbin,et al.Rolling bearing fault diagnosis based on morphological wavelet theory and bi-spectrum analysis[J].Journal of Zhejiang University(Engineering Science),2010,44(3):432-439.
[4]Holtham P M,Jeffrey I G.ELF signature control[C].UDT,1996:486-489.
[5]毛 伟,张 宁,林春生.在三层介质中运动的时谐水平偶极子产生的电磁场[J].电子学报,2009,37(9):2077-2081.Mao Wei,Zhang Ning,Lin Chunsheng.The EM fields produced by a moving horizontally-directed time-harmonic dipole in three-layer medium[J].Acta Electronica Sinica,2009,37(9):2077-2081.
[6]卢新城,龚沈光,林春生.自适应谱线增强在舰船轴频电场信号检测中的应用[J].数据采集与处理,2004,19(4):438-440.Lu Xincheng,Gong Shenguang,Lin Chunsheng.Application of adaptive line enhancement on testing the shaft-rate electric field of a ship[J].Journal of Data Acquisition&Processing,2004,19(4):438-440.
[7]姚天任,孙 洪.现代数字信号处理[M].武汉:华中理工大学出版社,1999:45-120.
猜你喜欢
通信电源技术(2024年2期)2024-04-07 14:35:26
舰船科学技术(2022年21期)2022-12-12 08:07:10
舰船科学技术(2021年12期)2021-03-29 01:28:44
制造技术与机床(2017年9期)2017-11-27 02:13:56
地震研究(2017年3期)2017-11-06 23:38:05
制造技术与机床(2017年3期)2017-06-23 08:11:33
舰船科学技术(2016年1期)2016-02-27 15:39:26
应用海洋学学报(2015年1期)2015-11-22 07:19:32
电子工业专用设备(2015年4期)2015-05-26 09:10:40
电机与控制应用(2015年3期)2015-03-01 03:49:46