
非量测型数码相机室内检校场的建设方案研究
2013-11-29 07:49常燕敏
铁道勘察 2013年1期
常燕敏 秦 军 刘 晨
(西南交通大学,四川成都 610031)
相机检校的方法有多种,由于数码相机的多样化以及检校内容的多样化,其检校的设备、作业流程和规范并未标准化。出于解求内方位元素和光学畸变的目的,以及检校环境的考虑,选择室内三维控制场检校方法,而实施相机检校的前提条件是建立高精度的三维检校场。
1 检校场的建立
1.1 检校场地的选择
用于普通数码相机检校的三维检校场地一般应该满足以下几个方面的要求:①检校场地需要有一定的深度,满足数码相机在无穷远处能获得满幅检校场图像;②检校场地有一定的纵深,满足三维层次的标志点布置;③标志点之间的几何关系长期或在一定时期内必须稳定;④标志点利于经纬仪或全站仪精确测量。综合考虑以上关于三维检校场建立的条件,检校场地选定一栋三层实验楼,该楼高约25 m,有走廊、墙体、柱子和凹槽,构成了前后4个层次的立体结构。由于在凹槽内粘贴标志困难很大,只能利用走廊、墙体、柱子3个层次。实验楼内有足够的光线条件,方便在任何时间获取试验所需数据。墙面为白色,减少了影像噪声点的影响,能够在该楼对面50 m左右,以不同的高度、不同的角度进行多角度多方位拍摄。综上所述,该实验楼是一个比较理想的相机室内检校场地。
1.2 控制点标志的选择
检校场控制点人工标志类型较多,标志的选择应有利于精确提取像点坐标,而且方便基于全站仪或经纬仪的测角模式进行前方交会,获得控制点坐标。经过多次实验,最终选定图1标志作为此检校场的控制点标志。为方便测量控制点标志中心坐标,在标志的中心粘贴带有十字丝刻划的反射片,反射片带有十字丝刻划线,既可用来测量距离,又可用来瞄准。实验验证,粘贴反射片不影响检校软件对标志图像的自动识别和观测精度[1]。

图1 控制点标志示意
1.3 控制点标志的制作
影响控制点标志设计的因素很多,主要因素是航摄相机的参数。该检校场主要用来检校Cannon 5D MarkII,使用焦距f=35 mm/50 mm,像元大小 δ=6.4 μm。检校场控制点在影像上成像大小为6~10个像元时,匹配中心点的精度较高[2],过大或过小的标志成像均不利于识别、量测,靠人工识别,工作量大,精度低。由纵深一般为50 m及关系式f/h=δ/GSD可得,f=35 mm时采用直径d=6 cm的标志,f=50 mm时采用d=4 cm的标志,就能满足成像6~10个像元的要求。考虑到标志要容易固定且长期使用,标志的材料采用不易腐蚀的铝材,标志的模板为60 mm×60 mm的正方形铝片,表面刷白色防水漆,四角留有小孔用于固定,中间用黑色的防水漆刷出30 mm×30 mm的黑色正方形,然后在其近似中心粘贴大小为10 mm×10 mm的反光片。黑色与白色形成明显反差,利于标志图像的自动识别,反光片保证全站仪准确获取标志点的物方坐标。
1.4 检校场的布设
按照控制点不应该分布在一条直线上或接近一个平面内,要在三维方向均匀分布于整个摄区,且使它们在影像上也尽量满幅而均匀的原则。把标志点牢固地固定在左右两侧柱子、走廊的墙面及三楼天顶的后墙面上。控制点的个数直接影响主距的测定精度,增加控制点个数可以提高检校质量[3],因此该检校场共布设了77个标志点,标志点横向间距约为80 cm,竖向间距约为60 cm。在控制场的中间部分进行了标志点加密,竖向间距约为40 cm,以便长焦距窄视场角相机检校时可拍摄足够数量的标志。布设完后的检校场如图2所示。

图2 控制点布设示意
2 检校场的测量
2.1 坐标系的建立及测量方法
采用自由坐标系,利用后方交会的方法确定2个地面控制点A、B的坐标。为了得到精度评定的目的,需要有多余观测量,即测量4个点O1、O2、O3、O4的水平角。采用前方交会的方法,利用地面控制点A、B上的两台全站仪同时观测,交会出检校点Px的平面坐标(如图3所示)。
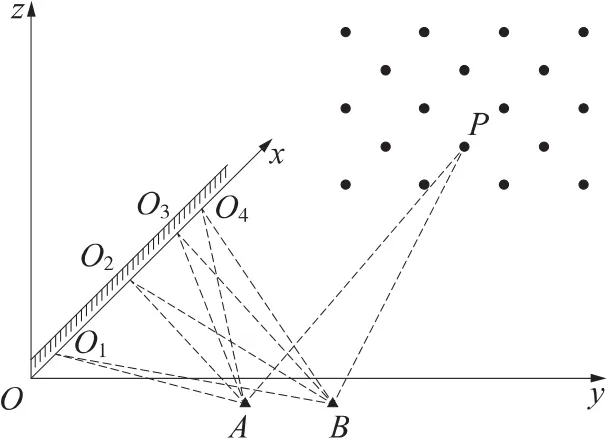
图3 坐标系示意
将两台同型号的全站仪分别架于A、B两地面控制点上,仪器高度大致相同;将铟钢尺悬挂或贴附在墙壁上,使圆水准气泡居中;调节全站仪的竖直微动螺旋,使视线水平,将两台全站仪目镜对准铟钢尺,读取尺子上的读数 HA、HB,则 hAB=HB-HA。假定 HA=H为一常数,则HB=H+HA。然后,通过三角高程测量,计算出各个标志点PX与地面控制点A、B间的高差,计算出各个标志点PX的高程HP。
2.2 测量设备的要求及观测限差控制
施测过程需用经过检校的同型号全站仪2台,精度要求1″或以上仪器(如徕卡1201);铟钢尺1根,要求尺上刻度数字清晰,尺子两端无磨损。观测过程中,角度各项的限差按表1、表2控制,测回数为2,且零方向读数按照 δ=180°(i-1)/n配置。

表1 水平角观测技术要求

表2 竖直角观测技术要求
2.3 标志点坐标计算及坐标精度
原始数据通过武汉大学测绘学院研发的科傻系统(COSA)进行平差,得到如表3、表4结果。

表3 最弱点及其精度
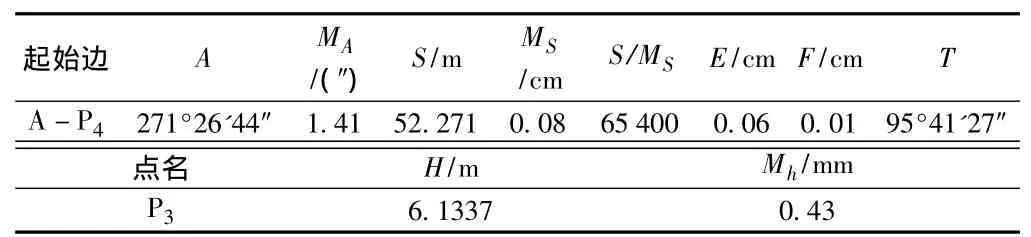
表4 最弱边及其精度_________________
即:标志点最弱观测中误差为mX=0.2 mm,mY=0.8 mm,mZ=0.43 mm,点位中误差m=0.93 mm。近似认为其平均深度D=50 m,mD=0.8 mm,即h=50 m,mh=0.8 mm,根据内方位元素测定精度要求[4]

f为相机的主距(f=35 mm/50 mm),mX0、mY0、mf分别为内方位元素的中误差,计算出内方位元素的中误差分别为mX0=0.000 2 mm、mY0=0.000 8 mm、mf=0.000 43 mm。不同的摄影测量任务和测区的环境对内方位元素的检校精度要求不同,一般把检校精度控制在0.001 mm 以上[4]。
3 结束语
高精度检校场的建设是摄影测量中相机检校和有关理论研究的重要基础设施。从项目需求出发,为了实现数码相机应用于摄影测量任务前的检验,介绍了一种室内三维检校场的建立方法,该检校场的测量方法采用工程测量的前方交会和三角高程原理,结合检校场的具体使用情况,简化了测量步骤,具有原理简单,操作方便的特点。测量结果表明,所建立的室内三维检校场能够满足数码相机应用于摄影测量的检校要求。该检校场建立方法简单易行,费用较传统检校场大大降低,且易于保养维护,方便数码相机影像获取后的预处理,对非量测数码相机在摄影测量中的应用具有重大的推动作用。
[1]王 留召,张建霞,王宝山.航空摄影测量数码相机检校场的建立[J].河南理工大学学报,2006,25(1):46-49
[2]李 瑞芳,关艳玲,左建章.高精度轻小型航空遥感集成系统室外检校场建设方案研究[J].测绘科学,2010,35(6):65-67
[3]苗 红杰,赵文吉,刘先林.数码相机检校和摄像测量的部分问题探讨[J].首都师范大学学报,2005,26(1):117-120
[4]许 磊,王留召,余洁,王丽.一种新型的数码相机室内检校场的建立方法[J].北京测绘,2008(2):20-22
[5]袁 修孝,杨芬,赵青.机载POS系统视准轴误差检校[J].武汉大学学报·信息科学版,2006,31(12):1039-1043
猜你喜欢
软件导刊(2022年8期)2022-08-25
北京测绘(2022年5期)2022-08-01
科学大众(2020年23期)2021-01-18
测绘通报(2019年4期)2019-05-10
同济大学学报(自然科学版)(2018年11期)2018-12-04
电子技术与软件工程(2017年20期)2018-01-17
小学阅读指南·低年级版(2017年12期)2017-12-26
传媒评论(2017年2期)2017-06-01
传媒评论(2017年2期)2017-06-01
体育教学(2014年5期)2015-02-02
