基于表面肌电信号的两侧下肢对应肌肉活跃差异性定量分析
2013-11-27 04:47:58许佳立王永奉刘更谦陈贵亮赵国如
中国生物医学工程学报 2013年5期
许佳立 王永奉 刘更谦 陈贵亮 赵国如*
1(河北工业大学机械工程学院,天津 300130)
2(中国科学院深圳先进技术研究院,深圳 518055)
引言
由于脑卒中患者的日益增多,如何能快速有效地恢复其运动功能,已成为康复医疗工程中的热门研究话题。有研究表明,基于肢体的运动康复疗法对此类患者有明显的康复效果,而且发病越早、步态功能受损越严重的患者其训练效果越明显。这种疗法基于神经系统具有可塑性的理论,即大脑的中枢神经具有自我修复的能力,采取持续的再学习康复训练,可以恢复受损的中枢神经系统[1]。由于患者群体的庞大,医患之间存在严重的供需矛盾,所以康复机器人技术的出现很好地缓解了这种矛盾。外骨骼康复机器人作为其分支,已成为热门的研究方向之一。随着康复设备向更加智能化的方向发展,以及生物传感技术的发展,外骨骼康复机器人也由被动型向主动型发展,通过人体本身的生理信号(如肌电信号(EMG)、脑电信号(EEG)等)进行外骨骼运动的控制已经成为主动控制研究的热点。尤其是表面肌电信号(surface EMG,sEMG)以其无创伤测量、易提取的优点,成为肌电控制假肢的理想选择[2-3]。
目前,此方面的研究多以上肢控制为主。Osamu Fukuda等人利用神经网络[4],识别上肢的常见动作。Bekir Karlik利用神经网络[5],识别肘关节弯曲/伸展、腕内旋/外旋等6种动作,并以此控制多功能的上肢假肢。由于下肢要承受整个身体的重量并要保持身体稳定,而且涉及肌肉较多,因此下肢外骨骼康复机器人的控制要相对复杂。He等利用脚底压力与肌电信号相结合的方式[6],采集臀部及大腿的11组肌肉的肌电信号,识别平地行走、跨越障碍、上下楼梯和转身等7种运动模式,取得了较好的结果。Samuel等提出了基于表面肌电信号的膝下假肢主动踝关节的位置控制方法[7]。
基于两下肢步态具有对称性的假设,但该假设至今仍然存在很大争议。在以上这些研究中,研究对象均为一侧下肢,其目的是简化数据的采集与分析处理。一些研究者通过分析对比两侧下肢的各种动力学和运动学数据,证明了对称性的存在。Hannah等通过时频域分析法证明[8],两侧髋关节在3个平面内的运动以及膝关节在矢状面内的运动具有对称性。Hamill等在试验者行走和奔跑时两侧下肢所受到的地面反作用力的研究中[9-10],也没有发现明显差异。另外,有些研究者认同步态的不对称性,并将这种不对称性与下肢功能的划分相联系[11-12]。还有研究者指出,在能效方面两侧下肢具有非常好的对称性。另一些人通过研究得到了相反的结论,特别是在表面肌电信号的研究中,有人提出两侧下肢具有不对称性[13-15]。
不管两侧下肢步态是否对称,都要重视两侧下肢对应肌肉在活跃程度上所表现出来的差异性。有研究者在一些外骨骼康复机器人的主动控制上采用了阈值法[16],若两侧肌肉活跃存在明显差异,那么阈值的设定也不相同。另外,在康复训练中,两侧下肢以表面肌电信号为基础的评价方式也会存在差异。笔者的目的就是通过表面肌电信号,研究下肢对应肌肉在人体静态稳定(站立)和动态稳定(行走)中表现出的差异性。
1 实验方案
在本实验中,募集了健康成年人共9名(平均年龄为26.4岁,最大33岁,最小24岁)。所有试验者在一年内均无下肢关节性损伤,实验之前24 h内也没有进行剧烈的活动。并且,所有试验者均为右利腿,即试验者在踢足球时均以右脚为主。以书面的形式告知所有试验者实验内容,并签署同意协定书。
1.1 数据的采集与处理
表面肌电信号采集仪器是由美国DELSYS公司生产的16通道Trigno无线肌电采集系统,数据采样率为2000 Hz,带通为10~500 Hz,并有效地去除了50 Hz的工频干扰,增益设为300。表面肌电信号数据来自两侧下肢小腿对应肌群:左右胫骨前肌(tibialis anterior,TA),左右内侧腓肠肌 (medial gastrocnemius,MG),共4块肌肉。在行走运动中,腿部有9块主要肌肉参与[17-18],并且作用大小不尽相同。由于是研究两侧肌肉的活跃差异性,与肌肉对某一动作的贡献度无关,因此只采用以上肌肉的EMG数据也能说明问题。另外,无线肌电传感器在两侧下肢对应肌肉上的放置位置应对称,位置的选择以及最大自主收缩(maximum voluntary contraction,MVC)的采集方法都参照文献[19]的方式进行。采用DELSYS公司开发的EMGworks分析软件,对表面肌电信号进行均方根(root mean square,RMS)转换,并用肌肉各自的最大自主收缩值进行标准化处理。
1.2 实验的建立
1)静止站立测试。要求试验者静止站立于水平地面上并保持1 min,双手自然下垂于身体两侧,双脚分开同肩宽,记录表面肌电信号,见图1(a)。
2)行走测试。试验者在跑步机上进行行走测试,见图1(b)。测试开始后,跑步机的速度从1 km/h逐渐递增,直至4.5 km/h(间隔0.5 km/h)。在每一个速度梯度上,当跑步机速度稳定后,记录两侧下肢肌肉的表面肌电信号。每次数据采集时间均为15 s,以便尽可能地降低疲劳产生的影响。

图1 实验测试。(a)静止站立;(b)行走Fig.1 Schematic diagrams of experiments.(a)standing;(b)walking
2 结果
2.1 静态稳定
静止站立时,下肢稳定性受到很多因素的影响,如视觉输入、体感输入、对线和肌肉张力以及重力因素。为抵抗重力的影响,有许多肌肉都有张力活动,使得身体在垂直方向上被限制在很小的范围内。踝关节有3个自由度,也就意味着在3个平面(矢状面、冠状面、截状面)上的运动。在人体站立时,其晃动只涉及矢状面和冠状面两个平面。胫骨前肌和内侧腓肠肌共同作用,保证了人体在矢状面的稳定性。
由图2可以看出,在静止站立状态中,下肢各肌肉均表现出低的活跃程度,而且存在明显差异。对比两侧下肢对应肌肉,前肌活跃程度右侧胫骨要高于左侧胫骨,而内侧腓肠肌左侧活跃程度要高于右侧。因此,在保持下肢稳定时,两侧肌肉的活跃程度存在差异。右侧胫骨前肌的活跃程度为左侧的3.1倍,左侧内侧腓肠肌的活跃程度为右侧的1.5倍。另外,在保持站立姿态时,以上肌肉会持续保持低的活跃程度,为了区分静态和动态下的肌肉状态,做以下定义:当各个肌肉的表面肌电信号值超过其静态值的1.2倍时,则该肌肉处于活跃状态,否则处于不活跃状态。这是因为通过多次计算发现,采用1.2倍时,既能将静态活跃值与动态活跃值有效区分,又能使动态活跃时间段最大化。
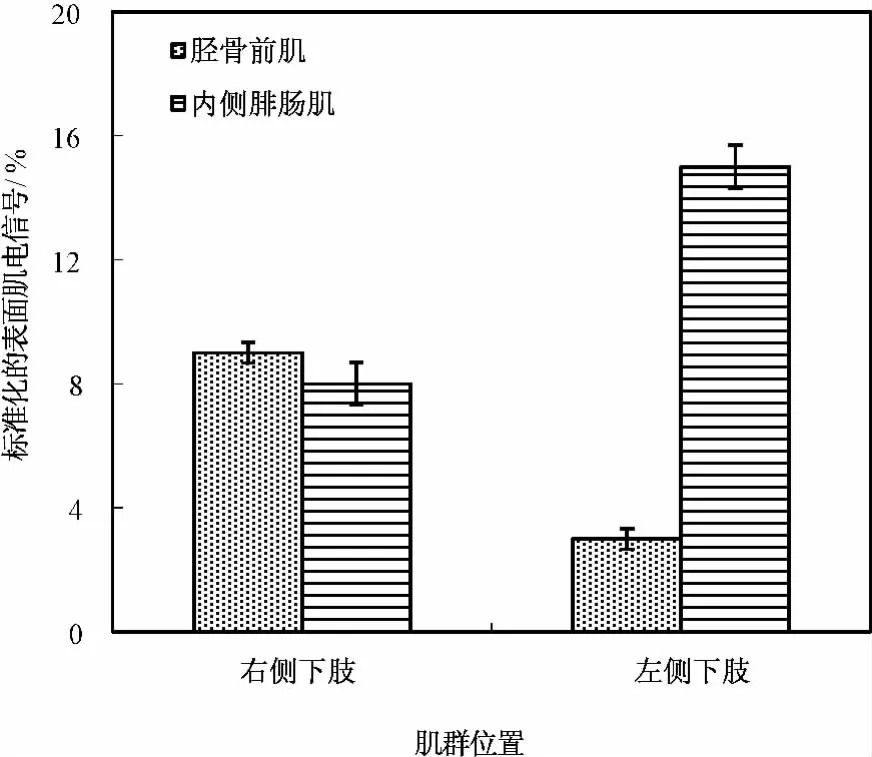
图2 静止站立时,9名试验者两侧下肢各肌肉活跃程度总体平均值对比Fig.2 Comparison between the ensemble average values of muscle activity of the bilateral lower extremities of the nine subjects during standing straight
2.2 动态稳定
步态的一大特点就是具有周期性。在正常行走过程中,以右脚脚跟接触地面时为周期起始点,以右脚脚跟再次接触地面时为周期终止点,这是现在研究步态时普遍采用的步态周期定义。在本研究中,研究的对象是肌肉的活跃周期,因此为了便于分析,对步态周期重新进行了以下定义:在正常行走过程中,以下肢胫骨前肌开始活跃为周期起始点,以该肌肉再次活跃为周期终止点。这种周期划分方式与步态的对应关系如图3(a)所示(以右侧下肢为例)。
人类的步态可大致分为摆动期和支撑期(见图3(a)),在正常速度下,摆动期与支撑期的时间比率为40/60。当步行速度逐渐加快时,支撑期和摆动期的时间比率也随之发生变化,摆动期变长,支撑期变短[27]。当达到走跑转换时,双腿支撑的时间就消失了,此时摆动期和支撑期的时间比率约为60/40。
图3(b)和图3(c)分别为3 km/h的速度下一名试验者的右侧和左侧下肢上胫骨前肌和内侧腓肠肌的表面肌电信号均方根值(root mean square,RMS)曲线,两条垂直线之间的时间为一个步态周期,垂直实线为步态周期起始线,垂直虚线为步态周期终止线。由于功能的不同,在一个周期内各个肌肉的活跃起止点也不同。一个步态周期内,下肢小腿要实现的功能有向前行进和姿势稳定控制。所谓姿势控制,是指保证支撑期中下肢的刚度,以抵抗重力作用。在步态摆动期中,目标包括调整踝关节角度,以确保足廓清以及准备承受身体的重量(姿势控制)。在支撑期中,需要完成两个功能——姿势控制和向前行进。
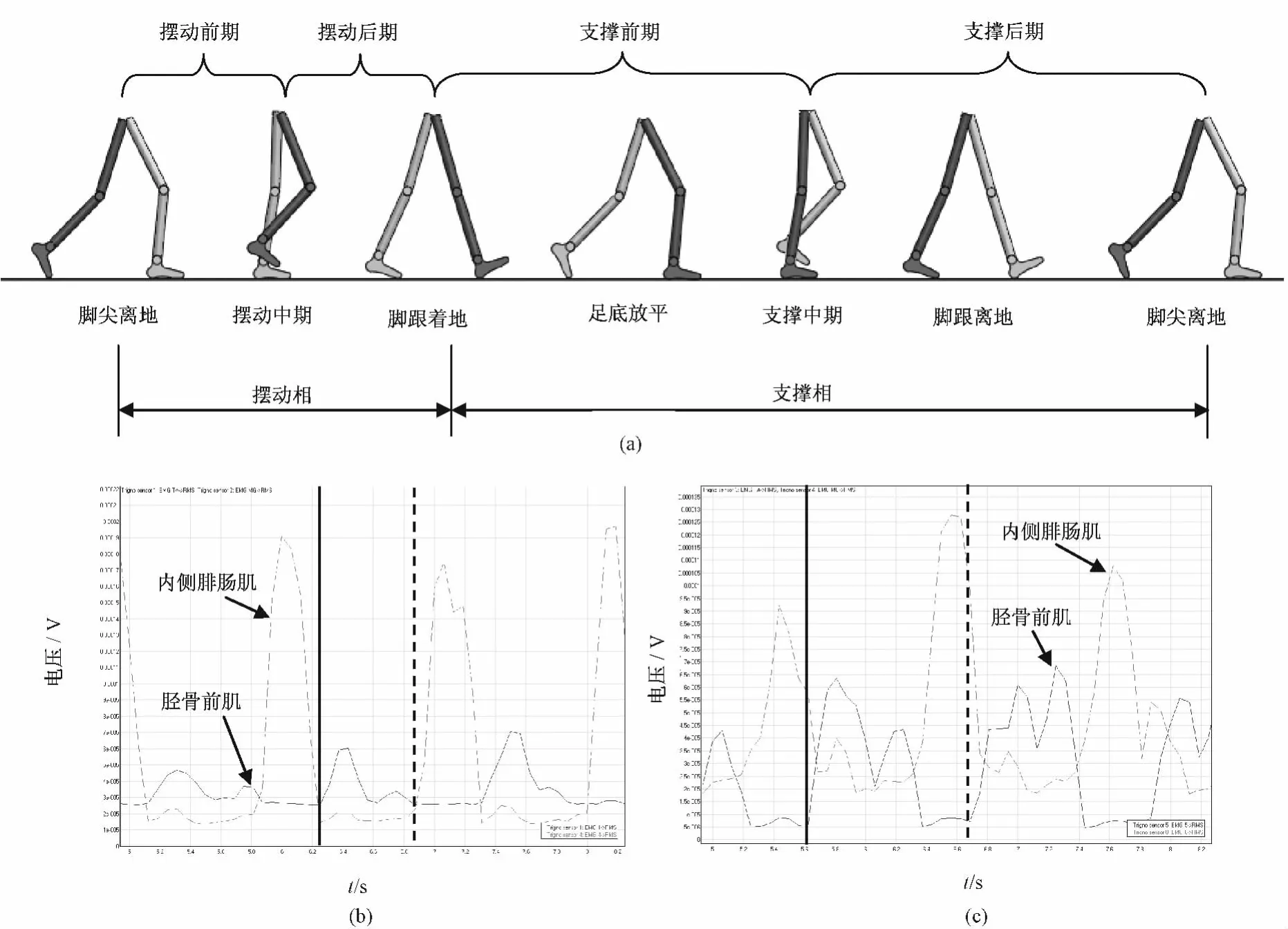
图3 步态周期和RMS曲线(垂直实线为步态周期起始线,垂直虚线为步态周期终止线)。(a)步态周期的划分;(b)左侧下肢各个肌肉活跃肌电信号RMS曲线(速度为3 km/h);(c)右侧下肢各个肌肉活跃肌电信号RMS曲线(速度为3 km/h)Fig.3 Gait cycle and RMS curves(Vertical solid lines represent the starting time of gait cycle,vertical dash lines represent the terminated time of gait cycle).(a)Division of gait cycle;(b)EMG activity from the muscles of right lower extremity of one subject converted by RMS during the speed of 3 km/h;(c)EMG activity from the muscles of left lower extremity of one subject converted by RMS during the speed of 3 km/h
胫骨前肌主要活跃在摆动期,开始于脚尖离地时(见图3(a))。在行走速度较低时(右侧<2 km/h,左侧<3 km/h),左右两侧的活跃表现为一个峰值;当速度逐渐增加时(右侧>2.5 km/h,左侧>3 km/h),胫骨前肌活跃的双峰模式开始出现,而且速度越高越明显。当足底放平后,胫骨前肌的活跃程度回到了静止站立时的水平(见图4中(a)和(b))。在摆动期前期脚尖离地时,两侧内腓肠肌都有一个小的波峰,和胫骨前肌的第一个波峰出现的时间相同,而且左侧明显高于右侧。内侧腓骨长肌的活跃从支撑期中期的足底完全着地开始,一直持续到支撑期末期脚尖离地(见图4中(c)和(d))。
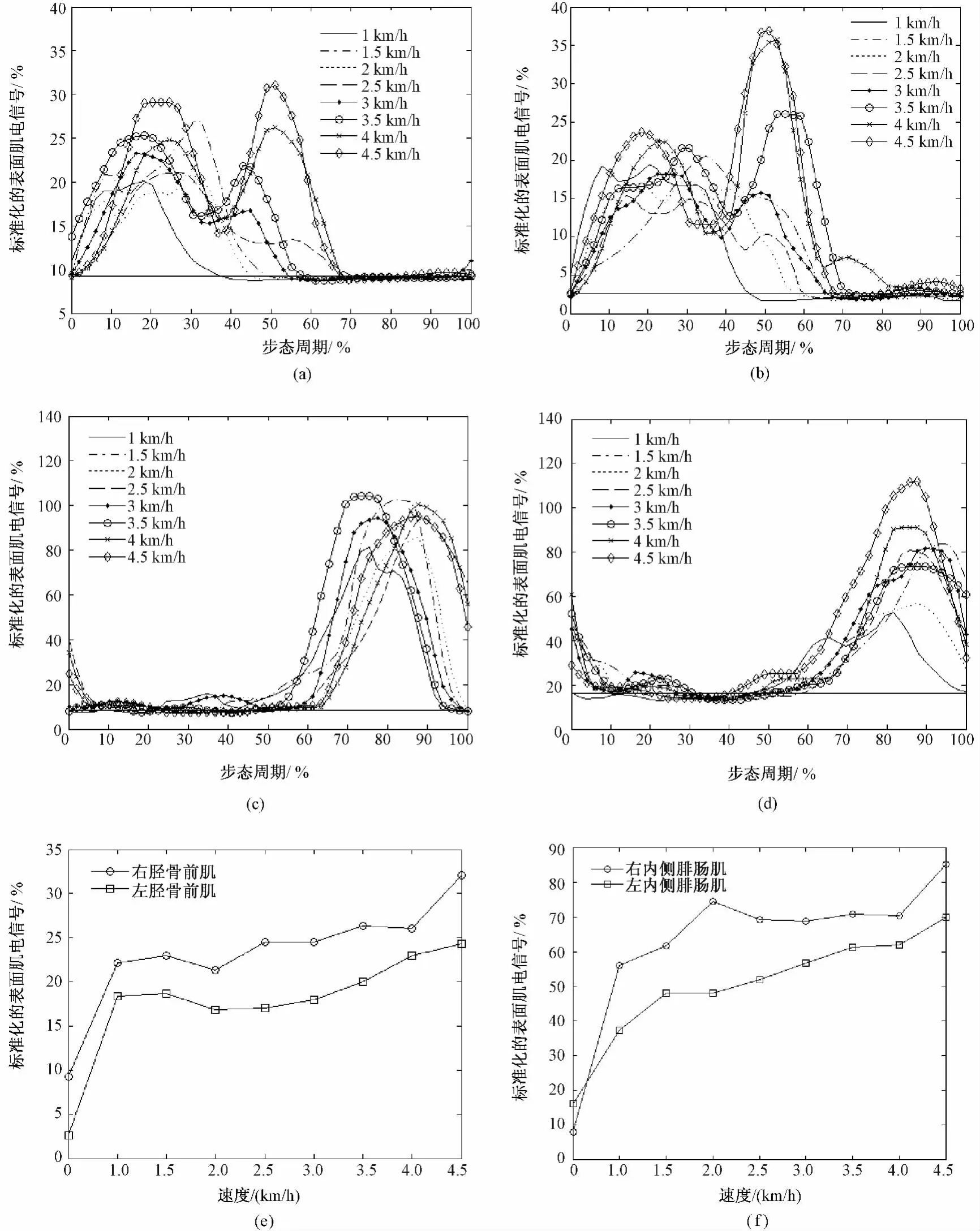
图4 不同速度下,在一个周期内所有试验者两侧胫骨前肌和内侧腓肠肌活跃程度的总体平均曲线以及肌肉表面肌电信号活跃程度与速度之间的关系(水平实线表示该肌肉在静止站立时的活跃程度)。(a)右侧胫骨前肌,(b)左侧胫骨前肌,(c)右侧内侧腓肠肌,(d)左侧内侧腓肠肌,(e)两侧胫骨前肌,(f)两侧内侧腓肠肌Fig.4 The ensemble average for the bilateral TA and MG of all the subjects in a gait cycle at a series of speeds and the relationships between the EMG activities of the muscles and various speeds.Horizontal solid line represents the level of activity of the muscle during static standing.(a)Right TA,(b)Left TA,(c)Right MG,(d)Left MG,(e)Bilateral TA,(f)Bilateral MG
如图4中(e)和(f),随着速度的变快,肌肉的活跃程度整体都呈现增长趋势,但不同肌肉的增长模式不同,对应肌肉的增长模式也存在差异。在4 km/h时,两侧的胫骨前肌活跃程度几乎相同,但随后又出现差异。在由静止状态到行走状态的转变过程中,两侧内侧腓肠肌的贡献度曲线有一个交叉点。
表1为一个步态周期内两侧下肢对应肌肉活跃相关性,其中r为Pearson相关系数,P为统计显著性。根据表1,两侧胫骨前肌在一个周期内的表面肌电信号RMS曲线只在速度1 km/h(P<0.01)和2 km/h(P<0.05)时具有明显的相关性。对于内侧腓肠肌,除了在3.5 km/h(P=0.126)下,两侧活跃曲线均具有较强的相关性(P<0.01)。即便是在具有较强相关性的部分,仍不能忽略其在幅值上的明显差异。虽然对应肌肉活跃程度的差异与步行速度间存在显著的负相关(见表2),但对于内侧腓肠肌来说,两侧最小差异仍有8.41%(4 km/h时),而且之后又有增大的趋势。

表1 一个步态周期内两侧下肢对应肌肉活跃相关性Tab.1 The correlation between muscle activities of the bilateral lower extremities during a gait cycle
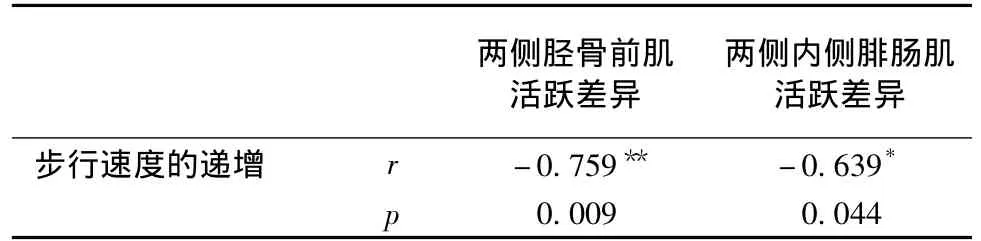
表2 两侧下肢对应肌肉活跃程度差异与步行速度相关性Tab.2 The correlation between difference of muscle activity of bilateral lower extremities and walking speeds
3 讨论
3.1 静态稳定
静止站立是人们日常生活中最常见也是最重要的姿势之一,一直没有得到研究者的关注,直到有人在研究身体姿态控制系统的控制原理中注意到了它的重要性[20]。在站立时,人体模型可以简化成一个倒立摆,Fitzpatrick等指出,踝关节的晃动会直接导致整个身体晃动的增加,因此人体下肢的稳定对维持整体的稳定起着重要作用[21]。在站立时,身体一直处在微小的晃动之中,并不是完全意义上的静止状态,即COP(center of pressure)的位置在不断变化。在研究有关视觉、踝关节以及前庭等感受器的敏感度时,人们找到了能引起这些感受器的最低感觉阈值[22-23]。人体内的前庭系统,特别是内耳石部分具有检测头部在矢状面和冠状面上晃动加速度的能力。人体在静止站立时,头部在矢状面和冠状面的摆动中,都没有达到前庭系统的最小感应阈值,踝关节处的晃动也一样小于其最小反应阈值[24]。
在一些关于步态的研究中,研究者认为两侧下肢在功能上有明确分工,右侧下肢主要提供身体向前移动时所需的连续推进力,而左侧下肢则主要对身体稳定性进行控制,并提供较小程度的向前推动力[25-26]。与动态步态相比,静止站立不涉及向前的推动力。因此在站立时,两侧下肢只涉及对身体的稳定性控制。从功能方面考虑,胫骨前肌和内侧腓肠肌共同构成了踝关节在矢状面内的运动。由两侧下肢构成的运动系统不能只看成是两条支链的简单叠加,而应该看成是一个并联系统。身体的稳定性由两侧协同完成,并且以左侧下肢的作用为主。
3.2 动态稳定
为保证姿势稳定,在支撑期前期,胫骨前肌的离心收缩使得足部下降减速,以减缓足的跖屈。Winter通过测试步行时踝关节和膝关节的能量输出,发现向前动力的产生是由踝关节跖曲产生的[28]。Gottschall等的研究也验证了这一说法[29]。因此,为保证身体向前的移动,在支撑后期,腓肠肌的向心收缩产生前进动力;在摆动期,要进行下肢位置的调整,保证足的廓清。这是通过髋关节、膝关节、踝关节共同屈曲完成的。胫骨前肌的活动使踝关节背伸,以确定足廓清并准备下一步落地。在摆动期末期和支撑期早期,踝关节会产生一个很小的踝关节背屈力矩,在足跟着地时帮助控制跖屈,尽管踝关节运动是跖屈,踝关节产生的仍然是背伸力矩。
在步行过程中,胫骨前肌的作用是进行足部姿势控制,主要活跃在摆动期。内侧腓肠肌的主要功能是提供向前的推动力,以保证人体连续向前移动,主要活跃阶段为支撑后期(见图3中(a)和(b))。在摆动期前期脚尖离地时,胫骨前肌和内侧腓肠肌同时出现了一个波峰(见图3中(b)和(c))。在摆动期,下肢肌肉的主要任务是调整踝关节角度,因此内侧腓肠肌此时的活跃与姿势控制有关。随着速度的逐渐加快,一个周期内摆动期与支撑期的相对时间在发生变化,摆动期的时间在延长,支撑期的时间在变短。在图4中可以看到,胫骨前肌的活跃时间在增加,内侧腓肠肌活跃时间在缩短。但是,由于肌肉步态中的功能没有随着速度改变而发生变化,所以两侧下肢对应肌肉的活跃模式基本相同。尽管如此,两侧下肢对应肌肉在幅值上的差异仍不可忽视。
当速度逐渐变快时,对身体稳定的控制要求和向前的推力也在逐渐增加。如图4中(e)和(f),胫骨前肌和内侧腓肠肌的活跃程度随着速度的增加而增大。但可以看出,两侧对应肌肉的活跃程度存在明显差异,随速度的变化比率也不相同。胫骨前肌的活跃程度右侧一直高于左侧,虽然在4 km/h处,两肌肉的活跃差异有所减小,但是当速度继续增加时,两者活跃程度的差异又出现了变大的趋势(见图4(e))。左侧下肢的主要作用是姿态稳定控制,右侧下肢的主要作用是提供前进的推动力,在本文中也同样支持这一观点。在动态稳定活动中,右内侧腓肠肌在向前行进中提供的推进力要大于左内侧腓肠肌,因此在静态与动态转变的过程中,可看到一个明显的交叉点(见图4(f))。
表1给出了在各个速度下运动时两侧对应肌肉的活跃相关性。结合图4中(e)和(f)可以看出,即使具有强相关性,其活跃程度上的差异也相当明显。表2中的数据说明,这种差异会随着速度的增加而逐渐减小。但是,就现有的研究数据来看,即使是在差异最小处,也没有达到可以被忽略的程度。
4 结论
笔者通过对两侧下肢对应肌肉功能作用、募集模式和活跃程度的对比,说明了其差异性的存在。在静态稳定(静止站立)中,胫骨前肌和内侧腓肠肌共同作用,保证了人体在矢状面的稳定性。通过对比表面肌电信号,可以看出两下肢对应肌肉的活跃程度存在明显差异。右侧胫骨前肌的活跃度为左侧的3.1倍,左侧内侧腓肠肌的活跃度为右侧的1.5倍。由两侧下肢构成的运动系统不能只看成是两条支链的简单叠加,而应该看成是一个并联系统。此时肌肉的表现,可以解释为同一平面内两个方向的调整控制分别由不同的下肢负责。
在动态稳定(行走)时,各个肌肉在一个步态周期内都有各自的作用区间,虽然该作用区间会随着速度的增加而改变,但肌肉在步态周期内的功能不会发生变化,而且两侧下肢对应肌肉的功能相同。因此,在多数情况下,两侧下肢对应肌肉在步态周期内表面肌电信号曲线具有较强的正相关性。例如,在速度4 km/h时,两侧内侧腓肠肌的活跃曲线具有较强的正相关性(r=0.938,P<0.01),但是仍不能忽视其在活跃程度上的差异性(dMG=8.41%)。
最终,实验结果表明,两下肢共同构成了一个并联系统,而非简单的两个串联系统的叠加。因此,尽管两侧下肢对应肌肉的功能和募集模式相同,但在各种稳定状态下,两下肢在功能分工上存在差异,所以对应肌肉在活跃程度上也表现出明显的差异性。因此,在基于表面肌电信号的主动型双侧外骨骼康复机器人的控制模式研究中,不管是采用阈值法,还是采用模糊神经网络识别或者其他方式,两侧下肢的控制要采用不同标准。而且,该结果对于脑卒中患者的康复评估也有参考价值。
[1]Carr JH,Shepherd RB.A motor relearning programme for stroke[D].Oxford:Butterworth Heinemann,1987.
[2]Fleischer C.Controlling exoskeletons with EMG signals and a biomechanical body model[D].Berlin:Berlin Information Industry University,2007.
[3]Kawamoto H,Suwoong L,Kanbe S,et al.Power assist method for HAL -3 using EMG-based feedback controller[C] //IEEE International Conference on Systems,Man and Cybernetics.Washington,DC:IEEE,2003:1648-1653.
[4]Fukuda O,Tsuji T,Takahashi K,et al.Skill assistance for myoelectric control using an event-driven task model[C] //IEEE/RSJ International Conference on Intelligent Robots and Systems.Lausanne:IEEE,2002:1445-1450.
[5]Karlik B,Osman TM,Alci M.A fuzzy clustering neural network architecture for multifunction upper-limb Prosthesis[J].IEEE Transactions on Biomedical Engineering,2003,50(11):1255-1261.
[6]He H,Kuiken TA,Lipschutz RD.A strategy for identifying locomotion modes using surface electromyography[J].IEEE Transactions on Biomedical Engineering,2009,56(1):65 -73.
[7]Au SK,Bonato P,Herr H.An EMG-position controlled system for an active ankle-foot prosthesis:an initial experimental study[C]//Proceedings of9th International Conference on Rehabilitation Robotics.Chicago:IEEE,2005:375-379.
[8]Hannah RE,Morrison JB,Chapman AE.Kinematic symmetry of the lower limbs[J].Arch Phys Med Rehabil,1984,65(4):155–158.
[9]Hamill J,Bates BT,Knutzen KM.Ground reaction forces symmetry during walking and running [J].Research Quarterly for Exercise and Sport,1984,55(3):289-293.
[10]Menard MR,McBride ME,Sanderson DJ,et al.Comparative biomechanical analysis of energy-storing prosthetic feet [J].Arch Phys Med Rehabil,1992,73(5):451 -458.
[11]Seeley MK,Umberger BR,Shapiro R.A test of the functional asymmetry hypothesis in walking[J].Gait& Posture,2008,28(1):24-28.
[12]Sadeghi H,Allard P,Prince F,et al.Symmetry and limb dominance in able-bodied gait:a review [J].Gait & Posture,2000,12(1):34-35.
[13]Arsenault AB,Winter DA,Marteniuk RG,et al.Bilateralism of EMG profiles in human locomotion [J].American Journal of Physical Medicine& Rehabilitation,1986,65(1):1-16.
[14]Gundersen LA,Valle DR,Barr AE,et al.Bilateral analysis of the knee and ankle during gait:an examination ofthe relationship between lateral dominance and symmetry [J].Physical Therapy,1989,69(8):640-650.
[15]Ounpuu S,Winter DA.Bilateral electromyographical analysis of the lowerlimbsduring walking in normaladults [J].Electroencephalography and Clinical Neurophysiology,1989,72(5):429-438.
[16]ZhangZ,Yao S,Zhang Y,etal. On the surface electromyography sensor network of human ankle movement[C]//IEEE International Conference on Robotics and Biomimetics.Sanya:IEEE,2007:1688-1692.
[17]Zajac FE,Neptune RR,Kautz SA.Biomechanics and musclecoordination of human walking Part I:Introduction to concepts,power transfer,dynamics and simulations[J].Gait& Posture,2002,16(3):215-232.
[18]Zajac FE,Neptune RR,Kautz SA.Biomechanics and muscle coordination of human walking Part II:Lessons from dynamical simulations and clinical implications[J].Gait& Posture,2003,17(1):1-17.
[19]Jönhagen S,Ericson MO,Nemeth G,et al.Amplitude and timing of electromyographic activity during sprinting [J].Scandinavian Journal of Medicine& Science In Sports,1996,6(1):15-21.
[20]Diener HC,Dichgans J,Bacher M,et al.Quanti fi cation of postural sway in normals and patients with cerebellar disease[J].Electroencephalography and Clinical Neurophysiology,1984,57(2):134-142.
[21]Fitzpatrick R,Burke D,Gandevia SC.Task-dependent re fl ex responses and movement illusions evoked by galvanic vestibular stimulation in standing humans[J].The Journal of Physiology,1994,478(Pt 2):363-372.
[22]Fitzpatrick R. Mccloskey DI. Proprioceptive,visualand vestibular thresholds for the perception of sway during standing in humans[J].The Journal of Physiology,1994,478(Pt 1):173-186.
[23]Simoneau GG,Derr JA,Ulbrecht JS,et al.Diabetic sensory neuropathy effect on ankle joint movement perception [J].Archives of Physical Medicine and Rehabilitation,1996,77(5):453-460.
[24]Winter DA,Patla AE,Prince F,et al.Stiffness control of balance in quiet standing [J].Journal of Neurophysiology,1998,80(3):1211-1221.
[25]Hirokawa S.Normal gait characteristics under temporal and distance constraints [J].Journal of Biomedical Engineering,1989,11(6):449-456.
[26]Sadeghi H,Allard P,Duhaime M.Contributions of lower-limb muscle power in gait of people without impairments [J].Physical Therapy,2000,80(12):1188-1196.
[27]Hirokawa S.Normal gait characteristics under temporal and distance constraints[J].Journal of Biomedical Engineering,1989,11(6):449-456.
[28]Winter DA.Energy generation and absorption at the ankle and knee during fast,natural and slow cadences [J].Clinical Orthopaedics and Related Research,1983,175:147-154.
[29]Gottschall JS,Kram R.Energy cost and muscular activity required for propulsion during walking [J].Journal of Applied Physiology,2003,94(5):1766-1772.
猜你喜欢
分子诊断与治疗杂志(2023年8期)2023-09-07 12:00:34
针灸临床杂志(2022年1期)2022-02-14 03:00:46
成都信息工程大学学报(2021年4期)2021-11-22 07:44:40
人人健康(2021年11期)2021-06-17 03:15:16
浙江医学(2020年14期)2020-08-13 01:26:28
科技传播(2019年24期)2019-06-15 09:29:28
中成药(2018年10期)2018-10-26 03:41:40
北京航空航天大学学报(2017年9期)2017-12-18 07:12:22
磁共振成像(2015年5期)2015-12-23 08:52:53
汽车电器(2014年8期)2014-02-28 12:14:29