
双轴光伏动态跟踪控制系统的设计与实现
2013-11-26 05:45杨春勇倪文军苏家仪钟志有
中南民族大学学报(自然科学版) 2013年4期
杨春勇,倪文军,苏家仪,侯 金,钟志有
(中南民族大学电子信息工程学院智能无线通信湖北省重点实验室,武汉430074)
太阳能是大自然赋予人类取之不尽,用之不竭的清洁能源,因此太阳能光伏新技术在世界各国的能源工业中占有重要地位,并得到大力扶持.现有光伏技术中的太阳能电池板多在安装时就被固定了接收太阳辐射的方向和姿态,固化状态对太阳能电池板对阳光的利用率普遍较低,约为20%[1],较大程度地影响了光伏技术的推广应用.利用自动跟踪技术提高太阳能利用率已成为国内外该领域的研究热点.
目前,国内外研究利用自动跟踪技术提高光伏太阳能利用率的工作主要集中在两个方向:单轴跟踪[2,3]的槽式[4]、平板聚光系统和双轴跟踪[5-8]的蝶式、塔式及菲涅尔聚光系统.其中,单轴槽式跟踪聚光技术发展较为成熟,现已投入到商业应用,但槽式系统的接收器长,散热面大,与双轴跟踪系统相比,其热损耗较大、跟踪精度较低,而且其抗风能力较弱,不适宜在大风地区工作.与单轴槽式跟踪聚光系统相比,双轴塔式、蝶式跟踪聚光[9,10]和线性菲涅尔聚光[11,12]供电系统有较高的太阳能利用率,但双轴塔式、蝶式跟踪聚光系统适合于大规模(15MW以上)循环发电,投资成本较高,不适合野外独立微小监测系统装置供电、偏远山区或者民族地区居住较分散的农牧民供电需求.另外,视日跟踪[13]通过计算太阳运动轨迹,在间断时间内调整太阳能电池板的姿势也可实现全天候跟踪,但输出效率较低,大多作为辅助性的跟踪方式.我们结合双轴跟踪与平板太阳能电池分别在提高太阳光辐射有效接收和低成本的特点,设计一种双轴式平板太阳能光伏电池自动向阳跟踪装置,用以解决小微监测系统或分散农牧民家庭的供电需求.
本文采用低成本、低功耗的MSP430单片机作为核心控制器,通过挂载PID闭环控制算法程序,控制光电传感器跟踪太阳辐射方向[14-17],使太阳能电池板接收太阳辐射利用率达30%~40%.所开发的系统装置可广泛应用于工业、农业和交通领域等基础设施建设;根据不同地域的需求,选择不同功率的太阳能电池板,价格低廉,可为国内广大的普通收入居民常年提供日常的家庭用电,为少数民族或偏远区域的发展提供有力的保障,有很高的经济收益和发展前景.
1 系统结构
设计的智能型双轴向阳跟踪控制系统结构框图如图1所示.系统主要由太阳能帆板、光照传感器、微控制器、步进电机组成.光照传感器采集不同方位的光强值,通过微控制器处理后的差值转化为电脉冲,输入给步进电机,驱动步进电机带动太阳能帆板按照光强差值减小的方向转动,至差值为0,则步进电机停止转动,系统达到稳定状态.
2 系统实现
2.1 硬件实现

图1 智能型双轴向阳跟踪控制系统结构框图Fig.1 The block diagram of the intelligent two-axis control system for sun tracking

图2 系统硬件结构Fig.2 The hardware structure

图3 光照传感器的相对位置俯视图Fig.3 The top view for the relative positions of light sensors
智能型双轴向阳跟踪系统硬件结构如图2所示.微控制器MSP430F149引脚资源分配如下:P6.0~P6.3给4个光照传感器,其中分别为4相光照传感器的采样值;P5.0~P5.3分配给水平方向步进电机;P2.0~P2.3分配给垂直方向步进电机.传感器阵列由放置在同一平面上的4个完全相同的光照传感器组成,该平面与太阳能电池板所在平面平行;光照传感器的放置方位为东、西、南、北4个方向,图3所示为4个光照传感器的相对位置俯视图.布置菱形传感器阵列,可利用双传感器组的相对差值实时判断某一时刻光强最大的具体方位,提高光强差的精确度,可使太阳能电池板短时间内达到最大功率点.步进电机驱动选用ST公司高电压、大电流的L298芯片,其最高工作电压可达46V,瞬时峰值电流可达3A,持续工作电流为2A.步进电机选用两相四线混合式,出轴齿数为20,带动50齿的齿轮转动.选用太阳能电池板的尺寸大小为48cm×38cm,额定功率为20W,额定电压为22V,通过降压电路为系统自身的步进电机和其他负载供电.为支持太阳能、220V市电和蓄电池三重电源保障,在供电系统中设计一个三级智能电源切换模块,以此避免用户或设备频繁掉电,增强电源的续航能力.三级智能电源供电流程如图4所示.12V蓄电池的工作方式为随充随用.当光照强度足够大时,由太阳能电池板给12V蓄电池充电;当光照较弱或乌云飘过时,系统MCU根据4个光照传感器其中一个的输出电压值与系统设定的电压阈值相比较,如果高于阈值,则系统仍继续根据光强差值减小的方向跟踪;如果低于阈值,即不足以给12V蓄电池充电时,跟踪系统程序关闭,此时启动二级供电电源,即市电.供电系统以蓄电池、市电、太阳能形成供电队列,保证了供电的稳定性.

图4 三级智能电源供电流程图Fig.4 Three grades intelligent power supply
2.2 软件实现
本系统通过PID算法精确控制步进电机转动.PID控制原理如图5所示,其中r(t)为系统初始设定值,e(t)为反馈量,u(t)为控制量;c(t)为系统输出量.
模拟PID算法的控制表达式为:

式中,e(t)为系统偏差,e(t)=r(t)-c(t);Kp为比例系数,Kp越大系统的调节速度越快;Ti为积分时间常数,Ti可提高系统的无差度;Td为微分时间常数,Td可预见系统偏差变化趋势,超前控制并消除误差.若定义Ki为积分系数,则为微分系数,则
为便于计算机实现,将式(1)中的微分项用差分代替,积分项用矩形和式代替,可得式(2)的数字式PID表达式,即:

式(2)也可改写为式(3):


数字式PID控制算法可以分为位置式PID控制算法和增量式PID控制算法,本系统使用的是位置式PID控制算法,下面推导建立位置式PID控制算法的数学模型.由式(3)可得,第时刻PID调节表达式为:

将(3)-(4),合并同类项可得式(5):

其中系数a0、a1、a2为中间变量.式(5)即为数字式PID控制算法的数学模型.由式(5)得系统偏差:e(k)=a0e(k)+a1e(k-1)+a2e(k-1).当该项偏差为0时,即u(k)=u(k-1),两个不同时刻的系统输出量相同,说明此时系统已处于稳定状态.
根据式(5),系统软件流程设计如图5所示.系统软件控制程序由光照传感器采样子模块,电机驱动子模块,PID算法子模块,太阳能电池板自动复位子模块组成.程序从每天太阳光强达到系统所设定阈值r(t)后,开始启动全天候自动跟踪程序,开启内部系统时钟和传感器采样模块,并通过闭环的PID算法,不断反馈系统差值e(t),最终迫使系统误差e(t)减为零,系统进入稳定状态.当光强低于设定的阈值r(t)时,系统不转动.

图5 系统软件流程图Fig.5 The software flowchart
3 系统测试与结论
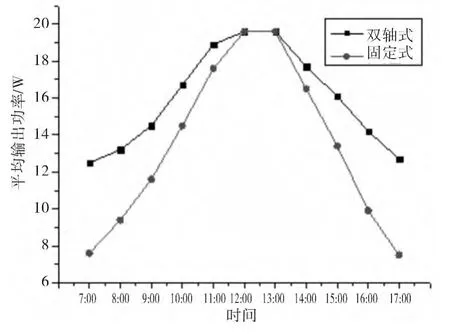
图6 两种方案的平均输出功率对比Fig6 Comparison of average output power

图7 两种方案的平均输出电压对比Fig7 Comparison of average output voltage
本系统考虑到当日17:00至次日7:00几乎无光强或光强很弱,因此设计该时间段内采用市电或蓄电池供电.为完成实验测试,选择设施农业环境监测终端作为测试对象,主要由光照强度传感器、温湿度传感器、大气CO2浓度传感器、土壤湿度传感器、土壤水溶液Ph传感器组成.研究小组分别于2012年10月24日、11月18日、12月18日,在晴朗、宽敞、明亮的野外环境下,测得这3天中7:00~17:00时间段内太阳能电池板的统计平均输出功率与统计平均输出电压(数值结果展示分别如图6、7所示),两曲线每个时段的平均输出功率一一对应.从图6,7中可看出,7:00~10:00,15:00~17:00时间段内,固定式较双轴式太阳能装置吸收的太阳能少;11:00~14:00时间段内,固定式与双轴式平均输出功率的峰值基本相同;得出的平均输出电压与平均输出功率的曲线走向基本一致.经统计计算,每日13:00~17:00,双轴式平均输出功率的渐趋线为y1=-1.73x+21.25;固定式平均输出功率的渐趋线为y2=-3.08x+22.62;其中 y为平均输出功率,x为时间(h).将y1与y2的差值对时间积分后除以y2在该时段内的积分,得出双轴式提高的输出功率约为20%.同理,在时段7:00~12:00得到两曲线的渐趋线后,积分得双轴式在该时段内提高的输出功率约为17%.因此,双轴式全天跟踪比固定式太阳能装置可平均提高37%左右的太阳能利用率.经实际测试,系统正常跟踪时,水平方向步进电机消耗功率为3.2~4W,垂直方向步进电机额定功率为5.5~6W,单片机消耗的功率不足1W;因此,系统自身在正常跟踪时消耗的总功率约为10W;太阳能电池板可提供额定功率为20W的电能,可为野外植物生理监测装置等提供足够电能.
4 结语
本文利用PID闭环控制算法设计并制作的智能型双轴向阳动态跟踪控制系统与装置,将太阳能电池板的利用率提高了37%左右,保证了正常光照条件下,输出电量满足实际要求;还设计了太阳能、220V市电、蓄电池三级电源供电队列,确保太阳能系统在掉电情况下仍能给受电系统正常供电,有效地延长了全系统工作时间.智能型双轴向阳跟踪控制系统提高太阳能的利用率,有效地解决了我们前期开发的设施农业监测终端[18]供电复杂、偏远山区供电难等问题,有较高的工程应用价值.
[1]史文华.高效太阳能电池研究[J].重庆文理学院学报,2011,30(6):1673-1677.
[2]Chen Xuexian,Gao Wenfeng,Qing Lan,et al.Experimental study of the uniaxial automatic solar tracking device towards sun comparison with fixed bracket[J].APPEEC,2011,12(3):1-4.
[3]张海燕,王建平.单轴旋转跟日式多平面镜反射聚光器的设计[J].太阳能学报,2011,32(12):1764-1771.
[4]王云峰,李 明,林文贤,等.平板式与槽式聚光太阳能电池组件性能分析[J].光学学报,2009,29(8):2287-2292.
[5]Jiao Huifeng,Fu Jianzhong,Li Yuchun,et al.Design of automatic two-axis sun-tracking system[J].MACE,2010:2323-2326.
[6]Bajpai P,Kumar S.Design,development and performance test of an automatic two-Axis solar tracker system[J].INDICON,2011,23(4):1-6.
[7]Heslop S F,MacGill I F.A simple method for predicting the output of dual-axistracking systems from fixed-tilt system outputs[J].AUPEC,2012,16(7):1-6.
[8]SEME S,Stumberger G,Vorsic J.Maximum efficiency trajectories of a two-axis sun tracking system determined considering tracking system consumption[J].Power Electronics,2011,26(4):1280-1290.
[9]张晓霞,殷盼盼,张 国,等.蝶式聚光光伏发电自动跟踪太阳装置的设计[J].太阳能,2008,11(9):32-34.
[10]向 平,程建民,毕玉庆.碟式太阳能跟踪装置的结构没计和动力分析[J].机械设计与制造,2009,12(6):17-19.
[11]浦绍选,夏朝凤.全平面镜线反射太阳聚光器的光学设计[J].农业工程学报,2011,27(11):282-285.
[12]杜春旭,王 普,马重芳,等.菲涅耳太阳能聚光系统跟踪倾角的矢量算法[J].太阳能学报,2011,32(6):831-835.
[13]王尚文.双轴跟踪碟式太阳能集热器的研究[D].武汉:华中科技大学,2007.
[14]Guan-Chyun Hsieh,Hung-I Hsieh,Cheng-Yuan Tsai,et al.Photovoltaic power-increment-aided incrementalconductance MPPT with two-phased tracking[J].Power Electronics,2013,28(6):2895-2911.
[15]Al Nabulsi A,Dhaouadi R.Efficiency optimization of a DSP-based standalone PVsystem using fuzzy logic and dual-MPPT control[J].IEEE,Industrial Informatics,2012,8(3):573-584.
[16]Petrone G,Spagnuolo G,Vitelli M.An analog technique for distributed MPPT PV applications[J].Industrial Electronics,2012,59(12):4713-4722.
[17]Xue Ping,Wang Haichao,Hou Juanjuan.Based on the fuzzy PID brushless DC motor control system design[J].MIC,2012,16(2):703-706.
[18]杨春勇,牛 磊.基于ZigBee的设施农业环境监测系统的设计与实现[J].中南民族大学学报:自然科学版,2012,31(1):88-92.
猜你喜欢
舰船科学技术(2022年10期)2022-06-17
铝加工(2021年5期)2021-12-02
军事文摘(2021年18期)2021-12-02
湖南电力(2021年1期)2021-04-13
文萃报·周二版(2019年48期)2019-09-10
电子制作(2018年12期)2018-08-01
制造技术与机床(2017年7期)2018-01-19
知识就是力量(2017年12期)2018-01-15
凿岩机械气动工具(2017年3期)2017-11-22
中国市场(2016年45期)2016-05-17
