
考虑柔性模态的硬盘音圈电机快速精确定位控制
2013-11-22 07:52:06赵艳彬王本利
微特电机 2013年12期
刘 磊,赵艳彬,王本利
(1.大连理工大学,辽宁大连116024;2.上海卫星工程研究所,上海200240;3.哈尔滨工业大学,黑龙江哈尔滨150080)
0 引 言
硬盘尺寸越来越小,但是容量越来越大,需要磁头进行快速精确定向,提高硬盘读取速度和精度[1]。在硬盘读取速度要求不是很高时,音圈电机的模型可以采用双积分,但是当需要更快的闭环带宽时,高频动力学模态可能被控制器激发,简单的PID 控制器或其他基于音圈电机刚体模型的控制器可能会发生溢出,使系统失去稳定性。于是提出了许多复杂的非线性控制,Venkataramanan 考虑音圈电机一阶柔性模态并设计了模态切换控制[2],Wua S 设计了迭代学习控制器[3]。
本文设计了超前滞后补偿、PD 及陷波滤波器联合控制音圈电机,镇定时间小于0.001 s,超调5%,可以同时满足了快速跟踪和精确定位的指标,并且执行简单。
1 滞后超前及PD,陷波滤波联合控制
音圈电机的动力学模型可以分为刚体部分和柔性模态部分[2]。即:
式中:Gr只考虑了一阶模态。音圈电机模型可以写成:
设计指标要求音圈电机对节约信号的镇定时间小于0.001 s,并且超调小于10%。
根据二阶系统理论[4],超调和阻尼的关系如下:

式中:Ms<10%,阻尼比ξ >0.6。
先考虑简单的PD 控制[4],为了达到设计的镇定时间,满足带宽的要求,取比例系数1,微分系数0.000 04,系统的影响如图1 所示,从图1 中可以看出,音圈电机的柔性模态被激发,控制器发生溢出,闭环系统失去稳定性。
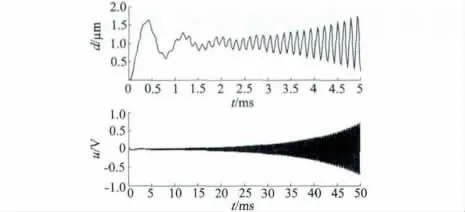
图1 PD 控制性能
为保证系统的稳定性,选择如下陷波滤波器:

考虑柔性模态的不确定性,不妨取ωf= 1.05ωr,ξf= 0.05,即柔性模态没有完全消除,存在误差。考虑陷波滤波器之后,控制框图如图2 所示。

图2 PD 与陷波滤波控制框图
增加陷波滤波器之后的PD 控制性能如图3 所示,从图3 中可以看出,柔性模态存在时,闭环系统仍然稳定,阶跃响应的镇定时间小于0.001 s,但是超调达到30%,不完全满足性能指标。
风是气象学研究、大气科学研究和气候研究中最重要的参量之一。准确及时的风场数据可以提高长期天气预报的准确性,提高对飓风等恶劣天气跟踪及登陆预报的准确性。大气风场对于气候学和气象学的研究、大气动力学的研究、数值天气预报、环境监测、风能发电和军事航空安全等方面起着重要的作用。目前对大气风速测量的激光雷达多采用多普勒效应,该类激光雷达称为多普勒激光雷达。
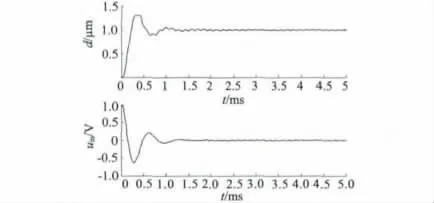
图3 PD 与陷波滤波控制性能及控制信号
再考虑传感器噪声,噪声为均方根0.1 μm 的白噪声,如图4(a)所示,对阶跃信号的跟踪如图4(b)所示,从图4 中可以看出,白噪声使闭环系统失去了稳定性。
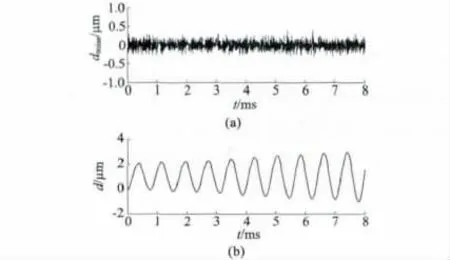
图4 测量噪声及PD 联合陷波滤波的控制性能
2 滞后超前补偿、PD 及陷波滤波联合控制
2.1 滞后超前补偿及陷波滤波
在噪声和扰动存在时,为了保证系统的稳定性,考虑超前滞后补偿器,如式(6)所示,并根据音圈电机Bode 图设计超前滞后补偿器参数[]。

式中:zcd和pcd为超前补偿零点、极点,zcg和pcg为滞后补偿零点、极点。
先设计超前部分,再设计滞后部分。选择穿越频率ωc= 800·2π,Kc= 0.4。
ωc处待补偿的相位极限:

考虑40°的相位裕度,超前补偿需要提供的相位偏移量Φmax如下:
根据式(9)可得超前零极点比例α1:

超前补偿的零点zcd:

超前补偿的极点:

超前补偿后,系统的带宽增加,需抑制穿越频率ωc对应幅值到0 dB,G(jωc)Glead(jωc)= 8. 88 dB ,对应的滞后零点、极点比例α2如下:

滞后补偿零点zcg:

滞后补偿极点pcg:

最终得到的超前滞后补偿如下:

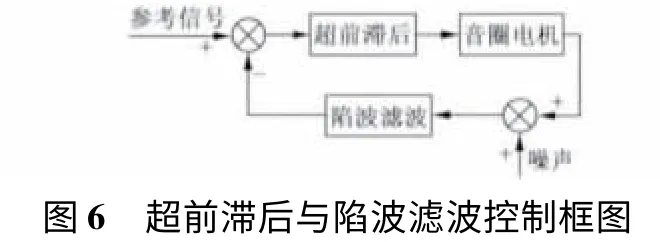
超前滞后补偿器Bode 图如图5 所示,控制系统框图如图6 所示。
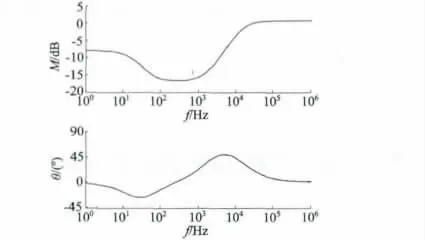
图5 超前滞后补偿Bode 图
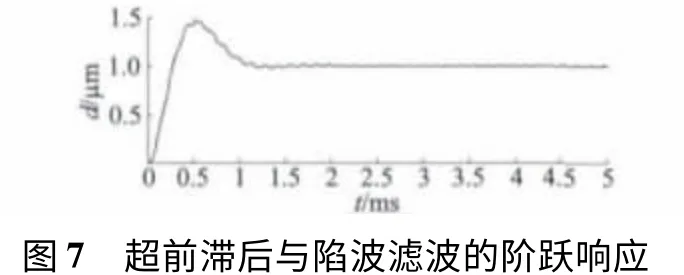
超前滞后补偿与陷波滤波的阶跃响应如图7 所示,从图7 中看出,镇定时间小于0.001 s,但是超调达到46%,需要增加新的控制环节来降低超调。
2.2 超前滞后补偿、PD 及陷波滤波联合控制
同时采用超前滞后补偿、PD 控制、陷波滤波,并且采用上述设计的参数,如图8 所示。
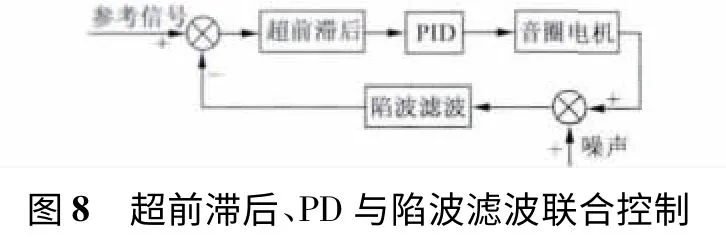
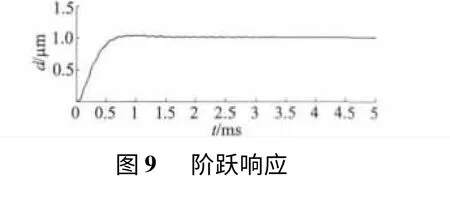
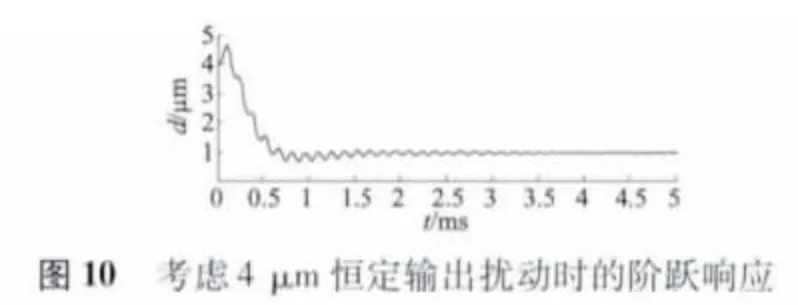
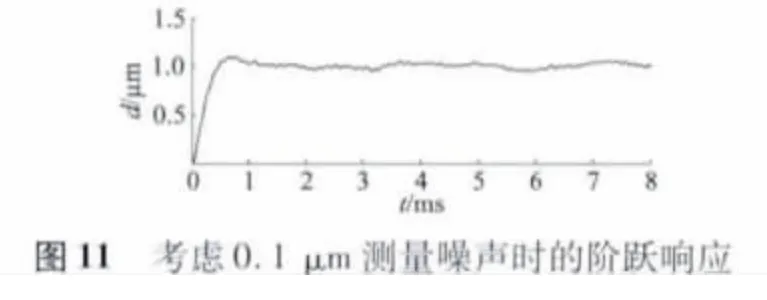
不考虑传感器噪声和扰动的阶跃信号性能如图9 所示,从图9 中可以看出,音圈电机在0.001 s 内达到稳定值,超调小于5%,满足性能指标要求。考虑4 μm 的恒定输出扰动,阶跃信号性能如图10 所示,控制系统对扰动仍有很好的抑制作用;考虑均方根0.1 μm 的传感器噪声,阶跃信号性能如图11 所示,输出在0.001 s 之后误差在5% 以内,满足了阶跃跟踪性能。
3 结 语
柔性模态使PD 控制器发生溢出,与陷波控制器联合控制可以满足镇定时间要求,但不满足超调的要求,本文设计了超前滞后补偿器,与PD 和陷波滤波器联合控制,阶跃信号的超调小于5%,镇定时间小于0.001 s,当存在输出恒值扰动及传感器噪声时,控制器仍然能够保持性能。
[1] Roger W.Future hard disk drive systems[J].Journal of Magnetism and Magnetic Materials,2009,321:555-561.
[2] Venkataramanana V,Ben M C,Tong H L,et al.A new approach to the design of mode switching control in hard disk drive servo systems[J].Control Engineering Practice,2002,10:925-939.
[3] Wua S,Tomizuka M.An iterative learning control design for self -servowriting in hard disk drives[J].Mechatronics,2010,20:53 -58.
[4] Katsuhiko Ogata.Modern control engineering[M].3rd ed.New Jersey:Prentice Hall,1997.
[5] Franklin G,Powell J,Emami-Naeini A.Feedback control of dynamic systems[M].6th ed.New Jersey:Prentice Hall,2009.
猜你喜欢
黑龙江大学自然科学学报(2021年4期)2021-11-19 07:05:06
现代仪器与医疗(2021年1期)2021-06-09 05:53:58
测控技术(2018年1期)2018-11-25 09:43:24
电子测试(2018年18期)2018-11-14 02:30:32
传感器与微系统(2018年7期)2018-08-29 00:44:36
天津教育·下(2018年9期)2018-07-13 08:25:47
西部广播电视(2015年3期)2016-01-15 02:05:44
广西科技大学学报(2015年4期)2015-02-27 12:22:27
全球定位系统(2014年5期)2014-08-21 09:50:14
电测与仪表(2014年15期)2014-04-04 12:05:28
