
一种微型多路电动舵机控制驱动器设计
2013-11-22 07:52:06刘健飞高智刚
微特电机 2013年12期
刘健飞,高智刚,李 朋,周 军
(西北工业大学,陕西西安710072)
0 引 言
近年,电动舵机已经广泛应用于防空导弹、巡航导弹、运载火箭等领域[1],并且应用范围逐渐拓展至便携式防空导弹、小型无人机及反坦克导弹等小型飞行器领域。由于这类飞行器本身体积较小,对其电动舵机系统也提出了小型化的要求。
传统舵机控制器采用模拟式控制电路与分立式功率元件相结合的硬件方案,需要集成栅极驱动电路,且一路控制驱动器只能控制单路舵机,在进行多路舵机控制时系统体积与舵机通道数成正比,体积大成本高,为其在小型飞行器中的应用带来了困难。
针对以上问题,本文提出了一种采用TI 公司集成功率驱动芯片DRV8412 为功率放大级,以Altera公司FPGA 为主控芯片的微型多路电动舵机控制驱动方案。利用该功率芯片内部集成的栅极驱动和自保护电路,可以省略H 桥式功率电路的栅极驱动电路及隔离光耦。同时,FPGA 能够同时处理四路舵机控制信号和舵机反馈信号,实现四路舵机控制器并行工作。本方案可以有效降低系统的体积和成本,实现四路电动舵机控制驱动。
1 控制系统总体方案
电动舵机系统为角位置随动系统,需要比较舵机控制指令和舵机位置反馈信号,根据两者误差由控制器形成控制量并输出相应占空比PWM 波,经功率放大后驱动电动舵机运转。本系统的主要性能指标要求如表1 所示。
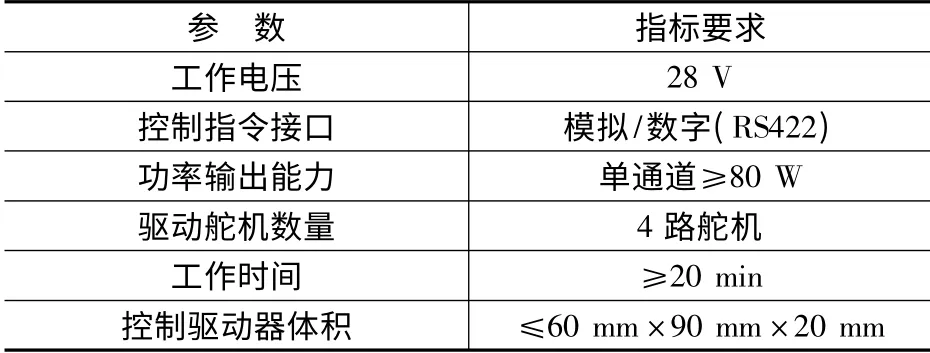
表1 系统性能指标要求
经分析可得本电动舵机控制驱动器总体结构如图1 所示。
系统主要包含四个单元,即数据接口单元,数据采集单元,控制器单元和功率驱动单元。
系统主要工作过程如下:
首先,通过数据接口单元(RS422 数字接口,ADM2587E)或数据采集单元(AD7938)接收数字量/模拟量形式的四路舵机控制指令。同时,通过数据采集单元(AD7938)采集四路舵机反馈信号,将该信号送控制器单元并产生舵机外部测量信号(或通过RS422 接口发送给上位机)。
然后在控制器单元(EP2C15AF256)内根据舵机控制指令和舵机反馈信号之差形成四路舵机的控制量,并产生不同占空比的多路PWM 信号输出。最后,控制器单元所产生的多路PWM 信号经功率驱动单元(两片DRV8412)进行功率放大后同时驱动四台电动舵机运转。
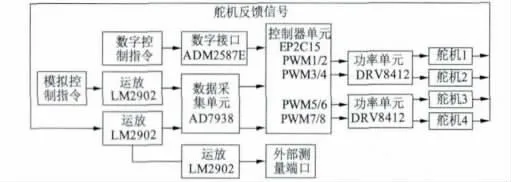
图1 硬件系统框图
2 控制系统硬件设计
2.1 功率驱动单元设计
集成功率芯片是一种新型功率器件,内部集成栅极驱动电路和多路功率全桥,具有保护电路齐全、体积小等特点。
由于本系统的功率驱动单元具有小型化要求,且要求每通道输出功率大于80 W,故选用TI 公司的DRV8412 集成功率芯片。该芯片的主要性能指标如表2 所示。

表2 DRV8412 集成功率芯片主要性能指标
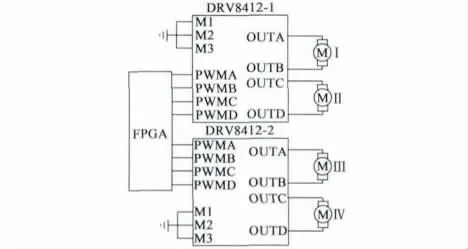
图2 DRV8412 电路连接原理
在功率驱动单元的设计中,共采用两片集成功率芯片DRV8412,如图2 所示。工作方式为带电流检测单桥控制,由FPGA 输出八路PWM 控制信号分别控制两芯片的八个功率半桥,由于电动舵机所使用的是有刷电机,因此配置成四个H 桥驱动电路。芯片1 中PWMA 和PWMB 功率放大后为OUTA 和OUTB,驱动舵机Ⅰ,PWMC 和PWMD 功率放大后为OUTC 和OUTD,驱动舵机Ⅱ;芯片2 采用相同方式,驱动舵机Ⅲ和舵机Ⅳ,从而完成对四路舵机的驱动。
2.2 系统控制器选择
目前电动舵机控制系统常采用的控器方案有三种:专用数字/模拟集成电路的可靠性较低,小批量生产或研发成本高;微控制器配合外围处理电路,当进行多路电动舵机控制时使用串行控制方式,存在响应速度慢等问题;以FPGA 为核心的数字式控制器,当进行多路控制器集成时,控制器可实现并行处理,具有集成度高、速度快、体积小、可靠性高等特点。
分析本系统的资源需求可知,外围设备与控制器连接需要65 个I/O 管脚,控制算法采用基于比例趋近率的变结构控制算法,外围设备逻辑控制模块五个,需要逻辑单元较少。因此,设计中选择1 片Altera Cyclone II 系列EP2C15AF256 芯片作为系统控制器,芯片共有256 个I/O 管脚,内部有14 448个逻辑单元,4 个PLL 锁相环,可以满足4 路并行控制的需要。
2.3 数据采集单元设计
数据采集单元选用ADI 公司ADC7938 模数转换芯片。该芯片共有8 个采样通道,12 位并行数据输出,转换速率达1.5 Ms/s,输入时钟频率为700 kHz~25.5 MHz。
四路舵机控制信号和四路舵机反馈信号送入ADC 进行模数转换前,首先通过运算放大器进行阻抗隔离,随后通过ADC 进行八通道采集,采集数据通过并行接口送入FPGA 处理,使数据传输速度比SPI 方式更快。
2.4 数字接口芯片
数字接口主要用于与上位机进行数据交换,实现舵机控制指令接收和舵机反馈指令上传。本系统采用RS422 接口,通过差分信号进行数据传输,能够在复杂电磁环境中使用。
考虑系统的小体积要求,选用ADI 公司的ADM2587E 数字接口芯片,其封装为SOIC-20,该芯片数据传输率可达500 k /s,包含一个接收器和一个发送器。
3 软件设计
FPGA 软件采用Verilog HDL 硬件描述语言进行编写,综合后的硬件描述语言下载到FPGA 中,在FPGA 内部形成硬件逻辑电路。四路控制器在FPGA 内并行运行,运算速度由用户进行控制,而不受微控制器的指令周期限制。
3.1 系统软件接口
软件功能结构主要分为五个模块,即初始化及错误状态控制模块、ADC 控制模块、控制算法模块、PWM 波生成模块、RS422 控制模块。可得本系统软件结构如图3 所示。

图3 系统软件功能结构
图3 中各部分功能如下:
(1)初始化及错误状态控制模块在系统初始上电时,对外设进行初始化,当外设故障时,响应故障信号并进行处理。
(2)ADC 控制模块产生控制信号,控制ADC 芯片转换模拟量,接收转换完成的数字量并传递给控制算法模块。
(3)RS422 控制模块将采集数字接口数据并传递给控制算法模块,同时将舵机反馈信号传递给上位机。
(4)控制算法模块根据ADC 控制模块提供的舵机控制和舵机反馈信号,产生与控制量对应的PWM 脉宽量,并传递给PWM 波生成模块。
(5)PWM 波生成模块根据PWM 脉宽量产生所要求占空比的PWM 波,用来控制集成功率驱动芯片。
3.2 软件系统流程
根据上位机提供的控制信号类型,可将系统工作方式分为模拟指令工作方式和数字指令工作方式,如图4 所示。
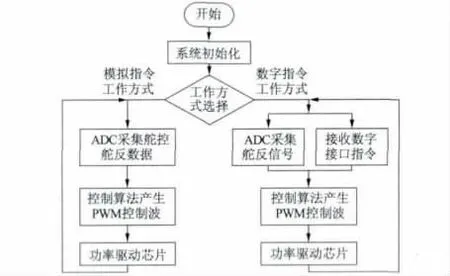
图4 软件工作流程
系统初始化完毕后首先选择工作模式。模拟指令工作方式中,ADC 采集舵机控制和舵机反馈信号,将数据传递给控制算法模块并产生相应的PWM控制信号,经功率放大后驱动舵机工作;数字指令工作方式中,通过RS422 接口接收上位机的控制指令,由ADC 采集舵机反馈信号,将两者同时送入控制算法模块,产生相应的PWM 控制信号,经功率放大后驱动舵机工作。
4 系统验证
硬件系统实物如图5 所示。电动舵机控制驱动器整体尺寸为58 mm × 85 mm × 20 mm(宽× 长×高),可同时实现四路舵机的控制驱动,每通道额定输出功率达84 W(功率电源电压为28 V),峰值输出功率达168 W。
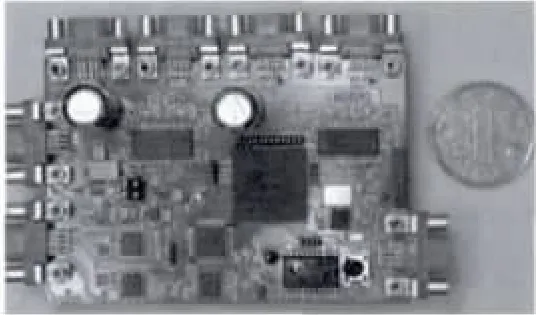
图5 硬件系统实物
测得系统工作时的PWM 波及舵机控制、反馈波形如图6 所示。
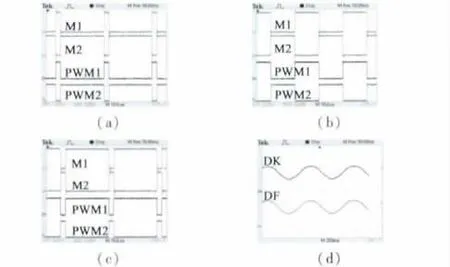
图6 系统工作PWM 及舵机反馈波形
图6(a)、图6(b)、图6(c)分别为FPGA 产生的10%、50%、90% 占空比下两路控制PWM 波形(PWM1、PWM2)及经DRV8412 芯片功率放大后的功率PWM 波形(M1、M2),图6 (d)为电动舵机控制指令(DK)与舵机反馈信号(DF)波形。从图中可看出,PWM 占空比可控,舵机控制器工作正常,舵机反馈信号正常跟踪舵机控制信号。
为测量温度随工作时间变化情况,用FLIR i7红外热像仪进行了舵机工作时DRV8412 芯片(图中十字中心处)的温度监控,结果如图7 所示。
从图7 可以看出,系统运行过程中,功率芯片DRV8412 的温升≤1.5℃/(5 min),工作20 min 后功率芯片温度低于50℃,系统散热良好,达到了工作时间≥20 min 的要求。
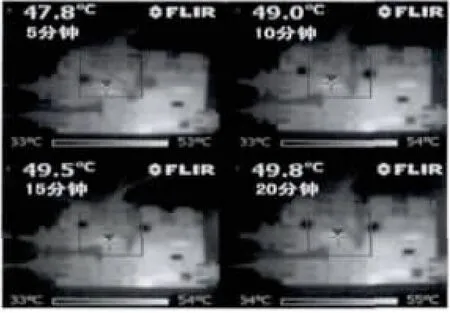
图7 DRV8412 工作红外温度
5 结 语
本文设计了一种基于集成功率驱动芯片DRV8412 和FPGA 的微型多路电动舵机数字式控制驱动器。系统在58 mm × 85 mm × 20 mm 的体积内通过单板集成了四路舵机的控制和驱动,并设计有模拟控制信号和数字控制信号(RS422)两种输入接口,每通道额定输出功率达84 W,达到了预期设计目的。
本舵机控制驱动系统具有体积小、集成度高、工作可靠等优点,在便携式防空导弹、小型无人机、反坦克导弹等小型飞行器中具有良好的应用价值。
[1] 汪军林,解付强,刘玉浩.导弹电动舵机的研究现状及发展趋势[J].飞航导弹,2008(3):42-46.
[2] 赵慧,张婷婷.一种基于FPGA 的舵机伺服系统设计[J].机床与液压,2010,38(6):59-61.
[3] 孙伟,黄大庆.基于FPGA 的多通道PWM 控制器设计[J].苏州科技大学学报(工程技术版),2009,22(4):72-76.
[4] 李树昌,周学仕,赵永刚.基于FPGA 的跟踪伺服器在光电经纬仪中的应用[J].计算机测量与控制,2010,18(9):2170 -2175.
[5] 高培金,穆桂脂,陈元勇.基于Verilog HDL 的AD7685 采样控制器的设计[J].自动化技术及应用,2011,30(01):89-92.
[6] 陈俊硕,刘景林,张金萍.基于FPGA 的直流电机PWM 控制器设计[J].微电机,2009,42(10):23-25.
[7] 杨伟临.基于AVR 和FPGA 的SOC-FPSLIC 的无人机下级控制系统[D].杭州:浙江大学,2007.
猜你喜欢
小读者(2021年2期)2021-03-29 05:03:20
自动化学报(2019年6期)2019-07-23 01:18:36
汽车观察(2018年10期)2018-11-06 07:05:28
电子制作(2018年1期)2018-04-04 01:48:14
车迷(2017年10期)2018-01-18 02:10:46
北京汽车(2017年3期)2017-10-14 02:15:52
制造业自动化(2017年2期)2017-03-20 14:26:08
发明与创新(2016年23期)2016-10-13 02:16:14
湖北工业大学学报(2016年5期)2016-02-27 13:14:51
舰船科学技术(2015年8期)2015-02-27 15:38:46
