
某型突击炮镜炮同步的调校原理及方法
2013-11-21 12:22刘俊邦
火炮发射与控制学报 2013年2期
刘俊邦,张 猛,梅 晨,陈 伟
(1.武汉军械士官学校,湖北 武汉 430075;2.空军勤务学院,江苏 徐州 221000)
某型突击炮的火控系统为直瞄火控系统,在瞄准手利用瞄准镜实施瞄准时,火炮应该与瞄准线运动一致,才能保证火炮也始终指向目标。该型火炮的潜望式瞄准镜直接固定在炮塔上,在俯仰上与火炮的同步依靠四连杆机构来实现。四连杆机构由于制造误差,使用中失调以及零件的变形等原因,使得对边不相等,变成一个任意四边形机构,这就会引起射角误差,在射击中无法命中目标。虽然经过校炮规正能保证瞄准线和炮身轴线在起始位置对准,但是在其他射角是否一致需通过镜炮同步检查进行判断[1]。在部队维修及工厂验收时,利用靶板或镜炮同步检测仪进行此项检查,但是并无规范统一的调整规正方法,本文就这一问题试图探讨四连杆机构传动误差的形成原因并寻找合理可行的检查调校方案。
1 镜炮同步原理
该型突击炮的火控系统为上反稳像式火控系统,瞄准镜镜体吊装在炮塔上不动,通过四连杆机构使瞄准线与炮身轴线同步转动(见图1)[2]。四连杆机构由固定连杆、瞄准镜摆臂、可调连杆和杠杆组成,通过调整可调连杆和偏心轴,使可调连杆与固定连杆、杠杆和摆臂长度分别相等,形成平行四边形机构。根据平行四边形机构性质可知,当火炮俯仰转动θ角时,杠杆和摆臂也将转过同样角度。在瞄准镜内部上反射镜通过1/2传动机构与转轴连接,当摆臂转过θ角,上反射镜只转动θ/2角,根据平面镜旋转性质,此时瞄准线正好转动θ角,如此实现了瞄准线与炮身轴线的同步[3]。

四连杆同步机构的特点是技术成熟、可靠性好,成本低、在新型轮式火炮中应用广泛,但对机械传动的精度要求较高,因此,为确保首发命中,在使用前必须进行检查和调校。
2 传动误差分析
四连杆机构由于失调等原因各边并不对应相等,在图2中,AB′≠OC,AO≠B′C,摆臂、杠杆同定边OC的夹角α0≠β0,两夹角间有一个差,这个差角记为初失调角Δβ0,即Δβ0=α0-β0。
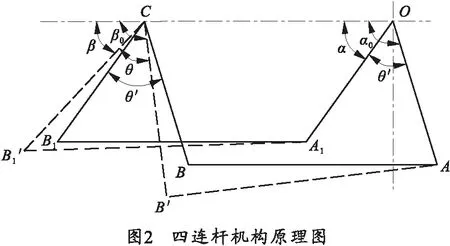
当炮身仰起角θ后,杠杆B′C转动了θ角,而摆臂AO转动了θ′角,此时摆臂、杠杆与定边OC的夹角分为α和β,通常情况α≠β,两个角的差角记为末失调角Δβ,即Δβ=α-β。
那么,四连杆机构的传动误差可用失调角之差表示,即:
Δθ=θ′-θ=Δβ0-Δβ
式中:Δθ为四连杆机构的传动误差;θ′为瞄准镜摆臂转动角度;θ为杠杆(炮身)转动角度;Δβ0为初失调角;Δβ为末失调角。
由于边长误差是引起传动误差的直接原因,因此,确定边长误差与传动误差的关系是检查调整关键。
下面分析边长误差与失调角的关系,假定杠杆长度误差为Δm,连杆长度误差为Δn,失调角为Δβ,由于边长误差和失调角均很小,这些值分别以微分形式dm、dn、dβ表示。如图3所示,由于边长存在误差,平行四边形ABCO变成任意四边形AB′CO,在△ABC中3个内角α、γ、ε随之发生变化,但三者之和却无变化,因此各内角的微分有:
dα+dγ+dε=0

由于dε=dβ,因此有:
dβ=-dα-dγ
其中,dα和dγ可由余弦定理,微分求得:

将以上两式代入dβ=-dα-dγ中,得:

上式写为有限误差形式,则失调角公式为:
这样由以上失调角公式容易得出传动误差公式:
由此式即可计算四连杆机构由边长误差Δm、Δn引起的传动误差Δθ。通过对上式分析可得出以下结论:
1)如图4所示,火炮越偏离初始位置,传动误差越大,当Δθ为正时,瞄准线的转角要比炮身转角要大,反之要小。
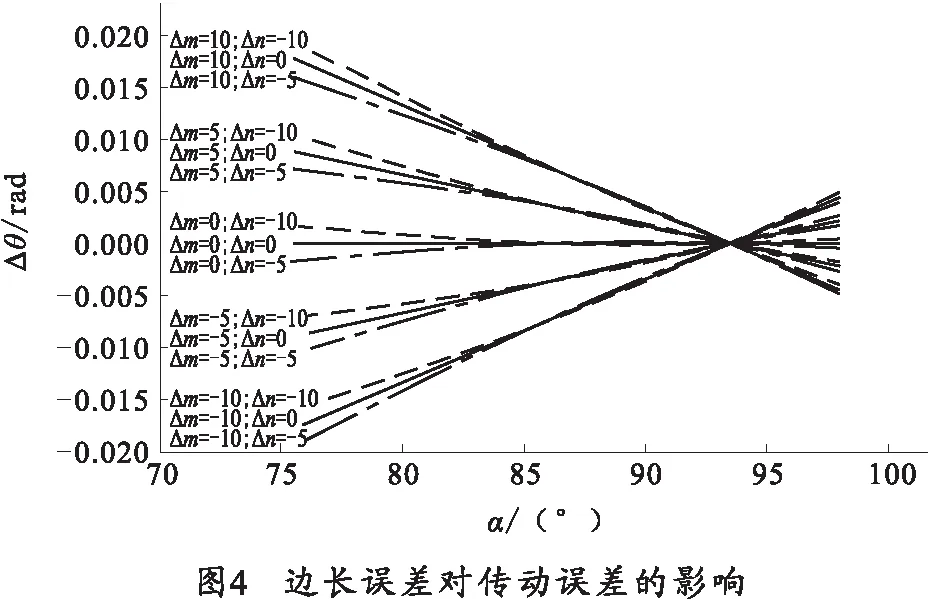
2)边长误差Δm、Δn对传动误差的影响程度不同,Δm的影响要大于Δn。
3)传动误差与杠杆长度m成反比,杠杆越长,则传动误差越小。
3 调校原理及方法
造成镜炮不同步的主要原因:一是上反射镜组件内部传动链的传动误差;二是因杠杆和摆臂以及可调连杆和固定连杆的长度误差造成的传动误差[4]。上反射镜组件的传动误差可在校炮环节消除,因此这里只讨论四连杆机构的传动误差。
前面提到,四连杆机构的传动误差由边长误差引起,需要通过调整偏心轴和可调连杆来消除。在实际检查调整过程中,直接测量边长误差Δm、Δn以及失调角Δβ是很困难的,但可以测量传动误差Δθ。如果能找出传动误差Δθ和失调角Δβ的关系,在测得Δθ后就可计算出失调角Δβ,然后在火炮装上失调角,再调整可调机构使机构恢复为平行四边形。
在杠杆误差Δm和连杆误差Δn同时存在的情况下,确定Δθ和Δβ的关系是不方便的,所以Δm和Δn要利用偏心轴、可调连杆分别进行调整。
1)在调整杠杆时,要消除连杆误差对传动误差的影响,根据传动误差公式可得调整条件,即:
Δn(sinα-sinα0) =0
对上式分析可知,当α=180°-α0时连杆误差Δn对传动误差无影响,此时传动误差为:
而此时因杠杆误差Δm引起的失调角Δβ令Δn=0得到:
公式表明,检查时要使摆臂和固定连杆的夹角α、α0之和为180°,则Δβ/Δθ=-1/2。
2)杠杆误差Δm被消除后,如果四边形机构仍然存在误差,那就是连杆误差Δn引起的。那么此时Δθ与Δβ的关系为:
对上式分析可知,比值Δβ/Δθ取决于检查过程中摆臂的始、末两个位置,即α0、α的取值。为减小Δβ的误差,比值|Δβ/Δθ|应取尽可能小的值。
如图5所示,当初始角度α0=90°时,整个射界范围内|Δβ/Δθ|的最大值最大,但是α0=90°时无法测得传动误差,同时考虑到实际的操作条件,选取α0=93.5°,此时火炮约为水平射角便于检查操作。
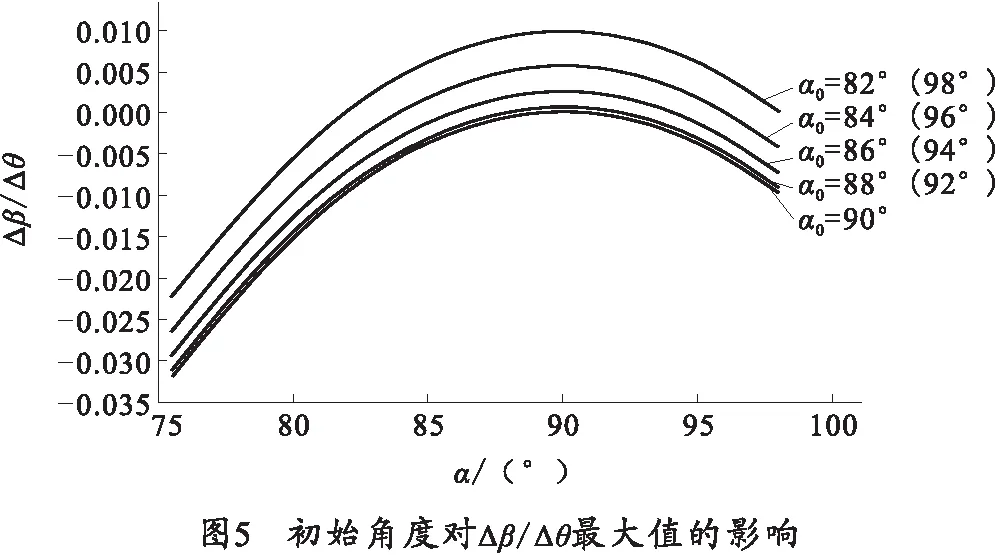
当初始角度α0确定以后,|Δβ/Δθ|随着|α-α0|增大而增大,这里为了方便记忆和计算,选取|α-α0|=16.8°,此时Δβ/Δθ=-40。
根据上面对传动误差的形成原因及消除方法分析,提出该型火炮镜炮同步检查调校方案:
1)将火炮停放在水平的地面上,转动炮塔使炮耳轴水平,利用现有的镜炮同步检测仪在射角为0°、5°、10°、15°、-3.5°分别测量瞄准镜摆臂、炮身与水平面的夹角,并求取传动误差,如果误差超差进行后续调整。
2)转动高低机使瞄准镜摆臂与水平面的夹角为113°(摆臂与固定连杆的夹角α0为93.5°),此时测量炮身轴线与水平面的夹角θ1。
3)继续转动高低机使摆臂夹角为106°(摆臂与固定连杆的夹角α为86.5°),此时测量炮身轴线与水平面的夹角θ2。计算传动误差Δθ=7°-(θ2-θ1),在火炮上装定θ2+Δθ/2,之后调整偏心轴使摆臂夹角恢复到106°。
4)重复第2步,记录炮身轴线与水平面的夹角θ3。
5)转动高低机使摆臂夹角为96.2°(此时摆臂与固定连杆的夹角为76.7°),此时测量炮身轴线与水平面的夹角θ4。计算传动误差Δθ=9.8°-(θ4-θ3) ,在火炮上装定θ4+40Δθ,之后调整连杆使摆臂夹角恢复到96.2°。
6)重复2~5步直到传动误差达标,之后在任意角度进行校炮,完成后即可保证镜炮同步。
通过试验检验,依据该方案进行镜炮同步调试,可以简单、方便地完成调试工作,并能较好满足镜炮同步精度要求。
4 结束语
本文针对当前某型突击炮的镜炮同步调校工作中“有检查,无调整”的现状,在分析镜炮同步误差产生原因和调整原理的基础上,提出了一套合理、高效的检查调校方案。通过试验证明,该方案调校精度高、操作简便,提高了该项检查的工作效率,为装备调试提供了一套行之有效的操作规范,同时也为部队、工厂维修实践提供指导和参考。
[1] 总参谋部.坦克火控系统构造与使用[M].北京:解放军出版社,2002:115-117.
Headquarters of the General Staff.Tank fire control system structure and operation[M].Beijing:People’s Liberation Army Press,2002:115-117.(in Chinese)
[2] 张日飞,吴勇.四连杆机构在坦克火控系统中的应用[J].火力与指挥控制,2008,33(3):115.
ZHANG Ri-fei,WU Yong. Application of quadric crank mechanism to tank fire control system[J]. Fire Control & Command Control, 2008,33(3):115.(in Chinese)
[3] 朱竞夫,赵碧君,王钦利.现代坦克火控系统[M].北京:国防工业出版社,2003:125-126.
ZHU Jing-fu,ZHAO Bi-jun,WANG Qin-li.Modern tank fire control system[M].Beijing:National Defense Industry Press,2003:125-126.(in Chinese)
[4] 甘茂治.火炮瞄准具原理[M].石家庄:军械工程学院,2001:59-60.
GAN Mao-zhi.Artillery optical sights principle[M].Shijiazhuang:Ordnance Engineering College,2001:59-60.(in Chinese)
猜你喜欢
小学生学习指导(中年级)(2021年10期)2021-11-01
家庭影院技术(2020年7期)2020-08-24
家庭影院技术(2020年5期)2020-08-24
小哥白尼(军事科学)(2020年2期)2020-06-16
学苑创造·B版(2019年6期)2019-07-12
家庭影院技术(2017年9期)2017-09-26
现代兵器(2017年1期)2017-02-13
山东工业技术(2016年15期)2016-12-01
中学数学杂志(高中版)(2015年3期)2015-05-28
小哥白尼·军事科学画报(2009年8期)2009-08-13
