基于T-S模糊建模方法的近空间飞行器姿控系统传感器故障调节技术研究
2013-11-13 01:57高志峰王菊芳禹长龙仇计清
河北科技大学学报 2013年6期
高志峰,王菊芳,禹长龙,仇计清
(1.南京邮电大学自动化学院,江苏南京 210046;2.河北科技大学理学院,河北石家庄 050018)
所谓近空间, 一般指距地20~100 km高度的空域, 处于现有飞机的最高飞行高度和卫星的最低轨道高度之间,而近空间飞行器是指能够飞行在近空间空域执行特定任务的飞行器。它集飞机、轨道战斗机, 甚至卫星、空间站等多方面优点于一体, 是21世纪争夺制空/天权, 进行空/天作战的关键武器[1]。由于近空间飞行器具有传统航空器与航天器所不具备的战略、战术以及效费比等优点,使其倍受世人关注,是目前世界各主要军事强国争夺空天权竞相发展的重点。进入21世纪以来,国家自然科学基金委自2003年开始以来已连续两次设立有关近空间飞行器关键基础科学问题的重大研究计划,中国众多具有航空航天背景的高等院校和科研机构都以此为切入点相继展开对近空间飞行器相关技术的研究,经过10年的不懈努力,目前已取得了丰硕的研究成果[2-10]。
文献[2]以综述论文的形式系统地总结了吸气式近空间飞行器和无动力近空间飞行器分别在巡航飞行过程中和再入返回大气层飞行过程中所使用的先进控制技术。文献[3]分别从气动力耦合、控制力分配、流体主动控制、飞行分段、非线性时变性和重视计算机的作用6个方面讨论了近空间飞行器对控制科学带来的挑战。文献[4]针对多变量、不稳定的近空间飞行器姿态控制系统, 在系统存在参数不确定和外部干扰的情况下, 假设执行器存在输入受限和舵面卡死故障的情况下提出一种鲁棒可重构跟踪控制策略,实现了飞行器在故障情况下的姿态角渐近跟踪期望的制导指令。文献[5]在建立近空间飞行器动力学模型的过程中分析了飞控系统的气动参数随攻角、速度的变化情况,同时还分析了气动舵面的耦合情况。文献[6]针对经过小扰动线性化处理之后的近空间飞行器纵向飞行动态模型,通过设计了一个阶数固定的鲁棒控制器,保证飞行器的姿控系统在高超声速飞行时具有良好的指令跟踪。文献[7]针对近空间飞行器气动参数存在摄动的情况,提出一种新颖的鲁棒控制器设计方法,该控制器由一个状态反馈控制器和一个参数摄动补偿控制器联立组合而成。文献[8]利用反馈线性化和动态逆控制技术对近空间飞行器姿控系统模型设计了一个状态反馈控制器,该控制器能够保证闭环姿控系统渐近稳定。文献[9]针对近空间飞行器的姿态控制系统采用模型参考直接自适应控制方法设计了一个跟踪控制器,仿真验证表明该飞行器在高超声速飞行中具有较好的高度指令跟踪和速度指令跟踪。文献[10]通过对近空间飞行器故障诊断与容错控制技术的国内外研究现状进行了系统的分析, 阐述了近空间飞行器动力学模型及飞控系统的故障类型, 分析了现有的主要研究成果和存在的问题, 最后对近空间飞行器故障诊断与容错控制技术未来的发展方向和面临挑战进行了展望。
尽管有关近空间飞行器控制系统设计的相关成果已经不少,但是需要指出的是上述研究结果大都是在假设近空间飞行器飞控系统传感器是健康情况得到的,由于近空间飞行器飞行空域特殊,复杂的电磁环境极易造成高精密传感器精度的降低,产生传感器故障,因此,针对近空间飞行器传感器故障进行估计与调节技术的研究就凸现的特别关键和至关重要。
1 问题的描述
这里首先给出近空间飞行器再入飞行过程中的非线性姿态控制系统模型:
(1)

根据文献[12]对近空间飞行器姿态控制系统的描述, 其非线性姿控系统(1)可由如下一组T-S模糊模型来近似表示:
(2)
其中:x(t)为姿控系统的状态变量;u(t)为姿控系统的控制输入;d(t)为范数有界的外部扰动;y(t)为姿控系统的测量输出;Ai,Bi,Di,C分别为适当维数的系统矩阵。本研究选择姿控系统的俯仰角速率和攻角2个状态量作为系统输出。
根据文献[13]对故障模型的建立,当姿控系统的传感器故障发生后,则被控系统(2)可以表示为
(3)
其中:Ds为传感器故障分布矩阵且为可逆矩阵;fs(t)=β(t-T0)f(t)表示传感器故障信号,f(t)为故障的幅值大小,β(t-T0)是一个切换函数可表示为
其中T0表示传感器故障发生的时间。
在给出主要结论之前,首先考虑外部扰动输入d(t)=0时,被控系统(3)可以转化为如下形式:
(4)
2 传感器故障调节策略设计
利用广义扩张系统方法将含有传感器故障的姿控系统(4)转化为如下T-S模糊奇异系统,
(5)
其中:
通过参考文献[14]所设计的扩张状态观测器,针对T-S模糊奇异系统(5),设计如下模糊观测器,
(6)

定理1如果存在一个正定矩阵P和一系列实矩阵Yi,使得下面的矩阵不等式成立:
(7)

那么姿控系统(4)的状态向量和传感器故障向量的估计值可由所设计的状态观测器(6)得到。
证明首先状态观测器(6)可以改写为如下形式:
(8)
(9)
(10)
从而误差系统(10)可以写成如下形式:
(11)
这里定义一个李亚普诺夫函数:
(12)
沿着误差系统(11)的状态轨迹对V(t)求导,可得
(13)
基于定理1中的结论,考虑含有外部有界扰动情况下的传感器故障估计策略。根据以上所述,姿控系统(2)可以转换为如下T-S模糊奇异系统:
(14)


定理2如果存在一个正定矩阵P和一系列实矩阵Yi,使得下面的矩阵不等式成立,
(15)

那么姿控系统(3)的状态向量和传感器故障向量的估计值可由所设计的状态观测器(6)得到。
证明经过计算观测器的误差动态方程可以表示为
(16)
定义如下李亚普诺夫函数:
(17)
沿着误差系统(16)的状态轨迹对V(t)求导,可得:
(18)
令
(19)
将式(18)代入式(19),可得如下等式:
(20)
进而证得如下不等式成立:
注1通过状态观测器(6)可计算出近空间飞行器姿控系统的状态向量和传感器故障向量的估计值,即:
由于故障分布矩阵Ds可逆,从而传感器故障的估计值可以写成如下形式:
(21)
利用传感器故障的估计信号,可对被控系统的输出进行补偿,达到渐近调节故障对被控系统动态性能影响的目标。
针对状态反馈控制系统而言,需对被控系统的输出信号进行直接补偿即可起到渐近调节故障的目的。
(22)
对于采用如下输出反馈控制:
(23)
设计的姿控系统,需要将被控系统的补偿输出yc(t)来代替式(23)中的y(t),则输出反馈控制(23)可以修改为
(24)
将式(24)代入发生传感器故障的姿控系统(3),则可以得到如下闭环控制系统:
从上式易看出若采用输出反馈控制,利用本文所提出的故障调节方案可以补偿传感器故障对被控系统的影响,使整个闭环控制系统具有一定的容错功能。
3 仿真验证
这里通过Matlab仿真来验证所提方法的有效性,近空间飞行器姿态控制系统T-S模糊模型的子系统矩阵Ai,Bi(i=1,2,3,4,5,6)可见文献[11]和文献[12]。选择状态向量中的俯仰角速率q和攻角α作为姿控系统的输出向量,从而矩阵C具有如下形式:
本研究选取与文献[11]相同的外部扰动输入d(t)=[0.1sint,0.01sint,0.01sint,0,0,0]T,扰动输入的分布矩阵Di=I6。选择H无穷性能指标γ=1.5,利用Matlab求解不等式(15),可得到广义观测器增益矩阵。
图2是被控系统传感器故障发生后的系统动态输出响应曲线,从中可以看出传感器故障对姿控系统的输出信号影响显著,破坏了被控系统的稳定性。通过采用本研究所设计的全维观测器来估计故障信号,从图3可以发现,传感器故障信号能够快速而准确的被估计出来,一旦传感器故障信号被估计出来,即可用来补偿姿控系统的实际输出。图4为采用故障调节之后的飞行器姿控系统动态输出响应曲线,可以看出故障调节之后的姿控系统输出基本上恢复到正常状态下的输出情形,达到了容错控制故障调节的目的。
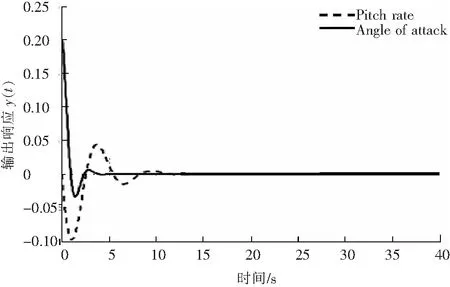
图1 无故障情况下的动态输出响应(用文献[12]中的方法)Fig.1 Dynamic output responses in fault free case using the method developed in document[12]
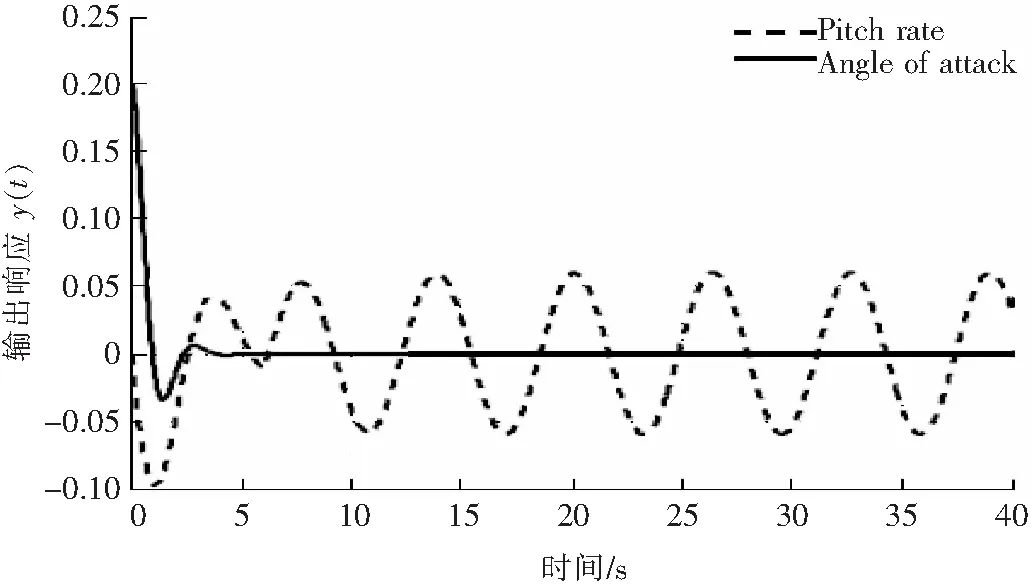
图2 故障情况下的动态输出响应 (用文献[12]中的方法)Fig.2 Dynamic output responses in fault case using the method developed in document[12]

图3 传感器故障估计曲线Fig.3 Sensor fault estimation curves

图4 传感器故障调节后的姿控系统动态输出响应曲线Fig.4 Dynamic output responses after sensor fault accommodation
4 结 论
本研究考虑近空间飞行器再入飞行过程中其姿态控制系统发生传感器故障,同时考虑外部扰动输入对姿控系统的影响,利用T-S模糊建模思想和广义扩张系统方法,首先将含传感器故障的姿控系统模型变换为T-S模糊奇异系统,然后设计一个全维模糊观测器,使其可以同时估计被控系统的状态向量和传感器故障,接着又设计了一个结构简单的传感器补偿控制策略来渐近调节被控系统所发生的传感器故障,并且利用李亚普诺夫稳定性方法分析了闭环姿控控制系统的渐近稳定性。最后通过Matlab仿真验证了所提方法的有效性。
参考文献/References:
[1] 崔尔杰.近空间飞行器研究发展现状及关键技术问题[J].力学进展,2009,39(6):658-673.
CUI Erjie. Research statutes, development trends and key technical problems of near space flying vehicles[J].Advances in Mechanics, 2009,39(6):658-673.
[2] 吴宏鑫, 孟 斌.高超声速飞行器控制研究综述[J].力学进展,2009,39(6):756-765.
WU Hongxin,MENG Bin.Review onf the control of hypersonic flight vehicles[J]. Advances in Mechanics, 2009,39(6):756-765.
[3] 黄 琳,段志生,杨剑影.近空间高超声速飞行器对控制科学的挑战[J].控制理论与应用,2011,28(10):1496-1505.
HUANG Lin, DUAN Zhisheng, YANG Jianying.Challenges of control science in near space hypersonic aircrafts[J].Control Theory & Applications, 2011,28(10):1496-1505.
[4] 张 强, 吴庆宪, 姜长生,等.考虑执行器动态和输入受限的近空间飞行器鲁棒可重构跟踪控制[J].控制理论与应用,2012,29(10):1263-1271.
ZHANG Qiang,WU Qingxian,JIANG Changsheng,et al.Robust reconfigurable tracking control of near space vehicle with actuator dynamic and input constraints[J]. Control Theory & Applications, 2012,29(10):1263-1271.
[5] 张 军,姜长生,方 炜.变结构近空间飞行器大飞行包络控制特性研究[J].宇航学报,2009,30(2):543-549.
ZHANG Jun,JIANG Changsheng,FANG Wei.Variable structure near space vehicle control chatacteristics of large flight envelope[J]. Journal of Astronautics, 2009,30(2):543-549.
[6] BUSCHEK H, CALISE A J. Uncertainty modeling and fixed order controller design for a hypersonic vehicle model [J]. Journal of Guidance, Control and Dynamics,1997,20(1): 42-48.
[7] MARRISON C I, STENGEL R F. Design of robust control systems for a hypersonic aircraft[J]. Journal of Guidance, Control and Dynamics,1998,21(1):58-63.
[8] WANG Q, STENGEL R F. Robust nonlinear control of a hypersonic aircraft[J]. Journal of Guidance, Control and Dynamics,2000,23(4):577-585.
[9] MOOIJ E.Numerical investigation of model reference adaptive control for hypersonic aircraft[J]. Journal of Guidance, Control and Dynamics,2011,24(2):315-323.
[10] 姜 斌,赵 静,齐瑞云,等.近空间飞行器故障诊断与容错控制的研究进展[J].南京航空航天大学学报,2012,44(5):603-610.
JIANG Bin,ZHAO Jing,QI Ruiyun,et al.Survey of fault diagnosis and fault-tolerant control ofr near space vehicles[J]. Journal of Nanjing University of Aeronautics & Astronautics, 2012,44(5):603-610.
[11] 王玉惠.空天飞行器基于模糊理论的鲁棒自适应控制研究[D]. 南京:南京航空航天大学,2008.
WANG Yuhui.Robust Adaptive Control Based on Fuzzy Theory for Aerosgace Vehicle[D].Nanjing:Nanjing University Aeronautics and Astron Autics, 2008.
[12] 王玉惠,吴庆宪,姜长生,等.基于模糊前馈的空天飞行器再入姿态的模糊鲁棒跟踪控制[J].宇航学报,2008,29(1):150-155.
WANG Yuhui,WU Qingxian,JIANG Changsheng,et al .Fuzzy robust tracking control for aerospace vehicle`s reentry attitude based on fuzzy feed forward[J]. Journal of Astronautics, 2008,29(1):150-155.
[13] 高志峰,姜 斌.一类参数不确定的线性时变系统的故障调节[J].系统工程与电子技术,2009,31(12):150-155.
GAO Zhifeng,JIANG Bin.Fault accommodation for a class of linear time-varying systems with parametric uncertain[J]. Systems Engineering and Electronics, 2009,31(12):150-155.
[14] 常 凯,吴国庆.基于扩张状态观测器的非线性系统故障诊断方法研究[J].河北科技大学学报,2012,33(5):429-433.
CHANG Kai,WU Guoqing.Fault diagnosis method for nonlinear systems via ESO[J].Journal of Hebei University of Science and Technology, 2012,33(5):429-433.
[15] 仇计清,高志峰,王菊芳,等.带时变时滞的不确定网络化控制系统的H∞控制[J].河北科技大学学报,2007,28(3):180-185.
QIU Jiqing,GAO Zhifeng,WANG Jufang,et al.H∞control for uncertain networked control systems with time-varying delays[J]. Journal of Hebei University of Science and Technology, 2007,28(3):180-185.
猜你喜欢
家庭影院技术(2021年3期)2021-05-21
防爆电机(2020年4期)2020-12-14
铁道通信信号(2020年5期)2020-09-21
环球时报(2020-08-11)2020-08-11
机电工程技术(2018年10期)2018-12-06
铁道通信信号(2016年10期)2016-06-01
铁道科学与工程学报(2015年5期)2015-12-24
电测与仪表(2015年19期)2015-04-09
电测与仪表(2014年11期)2014-04-04
铁路通信信号工程技术(2014年5期)2014-02-28