
基于行程-时间域的路段行程时间预测
2013-11-04 06:54张安泰丁闪闪
交通信息与安全 2013年2期
张安泰 柴 干 丁闪闪
(东南大学智能运输系统研究中心 南京 210096)
0 引言
随着现代信息技术在高速公路智能运输系统(intelligent transportation system,ITS)的广泛应用,动态路径诱导系统作为高速公路ITS的重要组成部分,目前正得到深入研究与开发。路段行程时间预测是动态路径诱导系统的关键技术,也是ITS的研究热点。交通运行状况的准确分析与出行路径的动态诱导,要求路段行程时间的估计与预测应当具有实时性、可靠性和准确性。采用新的技术方法,实时准确预测路段行程时间,是智能化路径诱导系统建设的迫切需求。
就目前行程时间预测问题,研究人员已经提出很多的预测模型与方法,如基于卡尔曼滤波的预测[1]、基于回归分析的预测[2]、基于时间序列的预测[3]、基于人工神经网络的预测[4]、基于支持向量机SVM的预测[5]等多种预测模型与方法。此外,Arezoumandi[6]通过研究可变限速系统对行程时间分布和可靠性的影响,提出了基于行程时间均值和标准差方法的行程时间预测,并利用密苏里州圣路易斯市I-270/I-255州际公路数据验证了算法的可行性。李庆奎[7]等人提出了用模糊综合评判方法对行程时间进行预测。由交通流量和占有率构成模糊评判的因素集,行程时间视为评判集,利用隶属度函数,预测行程时间。高林杰[8]等人在采用微观交通仿真和指数平滑估计路段行程时间的基础之上,提出了用灰色GM(1,1)模型对行程时间预测的方法。通过对上述预测方法的分析,可以发现这些模型在对行程时间预测时,大部分都是将高速公路路段视为1个整体,仅考虑了车辆经过路段起点和终点的时间等信息,并未考虑路段中检测器检测的交通流信息。
文献[9]在预测高速公路路径的行程时间时,以高速公路路段为基本预测单元,应用了行程-时间域法。但是路段的长度一般比较大,路段上交通流的不均匀特性导致对空间平均车速或行程时间的估计精度较低,从而影响了预测精度。考虑到高速公路ITS建设规模的快速增长,特别是交通动态参数检测技术的广泛应用,及检测器布设密度的增加(交通运输部给出了高速公路国省道交通调查观察站布局及实施工程),本文提出以检测器布设位置将高速公路路段划分为基本路段单元,应用行程-时间域方法对高速公路路段行程时间预测,并详细设计了预测算法。
1 行程-时间域与行程时间预测
将车辆行驶路段以交通检测器布设位置为节点分割为若干路段单元,将时间按照一定的间隔分为不同的时间单元。车辆在路段上行驶时,会依次经过不同的路段单元,在某路段单元行驶时,会经过不同的时间单元。对应的1个路段单元和1个时间单元就组成了1个时空单元,而这些时空单元组合在一起就形成了该路段的行程-时间域,见图1。
行程-时间域的纵轴为该路段的路段单元,横轴为时间单元。车辆的预测行程时间为车辆穿越该路段的行程-时间域所花费的时间。如图1中,某路段被分为N 个路段单元,t时刻出行的车辆按图中行驶轨迹穿越行程-时间域。车辆到达终点的时刻为T,车辆在该路段上预测行程时间为(T-t)。

图1 行程-时间域Fig.1 Travel-time Field
根据图1,预测车辆在路段上的行程时间,需要知道车辆在每1个时空单元的行程时间,而车辆在时空单元的行程时间依据车辆穿越时空单元的空间平均车速获得。由于是对路段行程时间进行预测,这些时空单元尚未实际发生,即无实际数据计算这些时空单元的空间平均车速。因此,采用历史数据,利用预测获得的空间平均车速。
车辆在穿越行程-时间域时行驶轨迹的复杂程度与路段的物理条件有关。1个路段单元可能对应整数个或非整数个时间单元,也有可能1个时间单元跨越多个路段单元。车辆在路段单元的起点时刻可能对应某时间单元的起点,也可能是时间单元的中间某点。
2 行程-时间域的预测算法设计
车辆在行程-时间域上虚拟行驶时,行驶决策流程见图2。
根据图2,设计出行程-时间域的算法步骤为:
步骤1。将高速公路路段依据检测器布设位置划分为合适的路段单元,时间按照间隔Δt划分为不同的时间单元。

图2 车辆虚拟行驶决策流程图Fig.2 The vehicle virtual travel decision-making flowchart
步骤2。根据检测器检测的历史及当前数据,求得路段单元的历史及当前空间平均车速。
步骤3。针对每个路段单元,用历史及当前空间平均车速训练神经网络,并预测路段单元未来n 个时间单元的空间平均车速。本文选择BP神经网络[10-11]作为对路段单元空间平均车速的预测方法。神经网络的输入量有4个:分别为时间单元k,(k+1),(k+2),(k+3)的空间平均车速;输出量为时间单元(k+4)的空间平均车速。在预测时,如果作为网络输入量的时间单元没有实际车速值,则采用之前得到的预测值。例如预测某路段单元未来第3个时间单元的空间平均车速,需要用到的4个输入量中前2个是根据已知数据计算出来的,而后2个则是前面计算的预测值。
预测时间单元数n需满足

式中:T为路段上车辆行程时间的集合。
步骤4。车辆在第k个时间单元进入路段单元i,在行驶了p(p=0,1,2,…)个时间单元后。车辆在该路段单元的行驶距离为

步骤5。路段单元i的长度为Li(i=1,2,…),根据步骤4中计算得到的车辆在路段单元的行驶距离l,获得车辆在路段单元i上的行驶决策为:
1)当行驶距离小于路段单元长度时,即li<Li,车辆仍然位于第i个路段单元,将按照第(k+p+1)个时间单元的预测空间平均车速(i,k+p+1)继续行驶。
2)当行驶距离等于路段单元长度时,即li=Li,车辆恰好在第(k+p)个时间单元结束时,进入第(i+1)个路段单元,按照第(k+p+1)个时间单元的预测空间平均车速(i+1,k+p+1)行驶,转到步骤4。
此时,车辆在第i个路段单元的行驶时间为

3)当行驶距离大于路段单元长度时,即li>Li,车辆在第(k+p)个时间单元结束前,就已经驶出路段单元i,进入第(i+1)个路段单元,按照第(k+p)个时间单元的预测空间平均车速(i+1,k+p)行驶,转到步骤4。
此时,车辆在第i个路段单元的行驶时间为

式中:L*为车辆在进入第(k+p)个时间单元前,行驶的距离。

步骤6。车辆结束最后1个路段单元的行驶到达终点。
3 预测性能评价
3.1 评价指标
为了评价预测方法的预测精度,引入误差指标如下。
平均相对误差

平均绝对相对误差

式中:N为预测行程时间数;Tpred(j)为第j 个预测行程时间;Treal(j)为第j个实际行程时间。
3.2 实例分析
参考沪宁高速公路的交通数据,对Vissim 中的若干路网建模参数和驾驶员行为参数进行适当标定,以使得仿真实验中的道路通行能力、交通量-密度(占有率)-速度关系等尽量逼近现实情况。仿真采用的公路线形见图3,道路输入交通信息参考沪宁高速公路的交通数据,见图4。通过Vissim 仿真获得车辆在路段上行程时间,以及划分路段单元时布设的检测器采集的数据。

图3 路段线形Fig.3 The linear of link
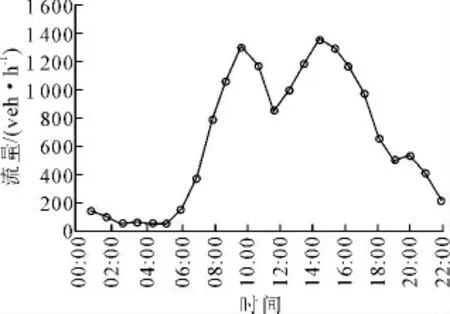
图4 沪宁高速公路交通量日变化图Fig.4 The traffic volume daily variation diagram of Shanghai-Nanjing Highway
时间单元的划分考虑到间隔太短所需预测的时间单元数增加,空间平均车速预测时误差累计对预测精度的影响增加,而增大间隔,虽然一定程度上能够减轻误差累计对预测精度的影响,但是过长不能合理利用检测器检测的数据。考虑到交通运行状况分析和路径诱导的需要,本文选择600s作为时间单元的长度。
经过统计分析仿真数据,路段上车辆的行程时间都小于1 600s,而每个时间单元为600s(10 min),因此只需预测每个路段单元3个时间单元的空间平均车速即可满足需要。
为了比较行程-时间域法预测行程时间相对于传统行程时间预测方法的有效性,设置了2个个预测方案,见表1。

表1 预测方案设置Tab.1 Prediction program settings
方案二,基于神经网络的传统预测方法,采用BP神经网络进行预测。网络包含4个输入神经单元,8个隐层神经单元,1个输出神经单元。网络输入量为:时间单元k,(k+1),(k+2),(k+3)的路段行程时间,输出量为时间单元(k+4)的路段行程时间。
1)车辆在行程-时间域中的行驶轨迹。由于预测的时间单元数太多,不能一一展示车辆在行程-时间域中的轨迹。选用09:00时出行的车辆,展示其出行轨迹,见图5。
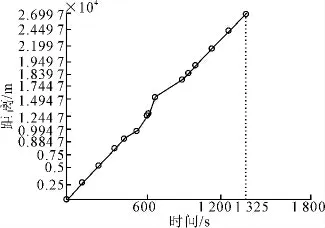
图5 车辆在行程-时间域中的行驶轨迹Fig.5 The vehicle trajectory in travel-time field
图5中折线代表9点出行的车辆在行程-时间域中的虚拟行驶轨迹,纵轴相邻刻度值之差为路段单元长度。车辆从行程-时间域的0 时刻出行,每600s代表1 个时间单元。虚线对应的时间轴代表车辆到达路段终点所花费的时间,从图中可以看出,车辆的预测行程时间为1 325s。
2)预测方案精度对比。将方案一、方案二的预测行程时间与实际时间的对比,见图6,7。
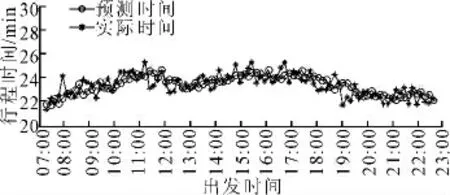
图6 方案一预测行程时间与实际时间对比Fig.6 The contrast between the prediction travel time of program one and the actual time
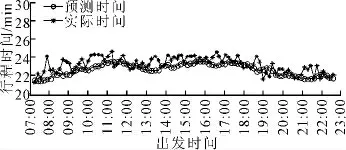
图7 方案二预测行程时间与实际时间对比Fig.7 The contrast between the prediction travel time of program two and the actual time
从图6、7的曲线比较,可以看出方案一的预测行程时间曲线与实际时间的曲线拟合优于方案二。根据式(6)、(7)对各方案的平均相对误差与平均绝对相对误差进行分析,结果见表2。
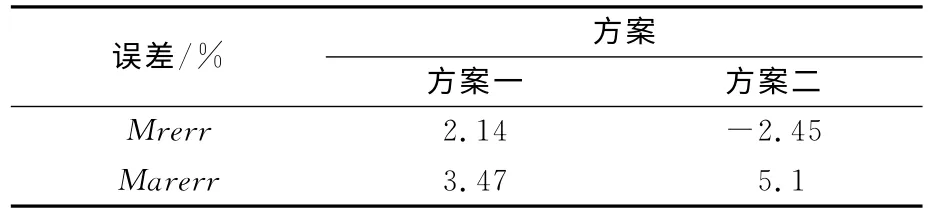
表2 各方案的平均相对误差与平均绝对相对误差Tab.2 The mean relative error and mean absolute relative error of programs
由表2可见,方案一的平均相对误差与平均绝对误差都小于方案二,表明方案一的行程时间预测精度优于方案二,即行程-时间域法在预测精度上优于传统的行程时间预测方法。
4 结束语
目前,高速公路ITS 建设快速增长,高速公路路段上安装了各种交通检测器,使得交通检测器密度不断增加。行程-时间域法依据检测器位置划分路段单元,合理利用了高速公路交通检测器检测的数据。
采用行程-时间域法预测行程时间,需要预测未来多个时间单元的空间平均车速,本文采用预测值代替实际值再次预测,误差累计问题难以避免。但是由于以检测器布设位置划分路段单元,路段单元长度相对较短,路段单元内交通流特性近乎同一,空间平均车速的估计精度提高,一定程度上降低了预测误差。采用行程-时间域法充分、合理、恰当地考虑了车辆在路段上不同位置不同时间的行驶特性,提高了预测精度。因此,从整体的角度考虑,行程-时间域法提高了行程时间的预测精度。对于如何减少累计误差,成为今后继续研究的方向。
[1]杭明升,杨晓光,彭国雄.基于卡尔曼滤波的高速道路行程时间动态预测[J].同济大学学报,2002,30(9):1068-1072.
[2]王 媛,杨兆升,王志建,等.基于遗传回归分析的无检测器交叉口流量预测[J].北京工业大学学报,2008,34(10):1077-1083.
[3]姚智胜,邵春福.基于状态空间模型的道路交通状态多点时间序列预测[J].中国公路学报,2007,20(4):117-117.
[4]Dharia A,Adeli H.Neural network model for rapid forecasting of freeway link travel time[J].Engineering Applications of Artificial Intelligence,2003,16(7):607-613.
[5]张 娟,孙 剑.基于SVM的城市快速路行程时间预测研究[J].交通运输系统工程与信息,2011,11(2):174-179.
[6]Arezoumandi M.基于均值和标准差的高速公路行程时间可靠性预测[J].交通运输系统工程与信息,2011,11(6):74-84.
[7]李庆奎,吕志平,葛智杰,等.基于模糊综合评判的智能行程时间预测算法[J].华东交通大学学报,2012(2):6-9.
[8]高林杰,隽志才,张伟华,等.基于微观仿真的路段行程时间预测方法[J].武汉理工大学学报:交通科学与工程版,2009,33(3):411-413,417.
[9]Jaimyoung K,Karl P.A Travel Time Prediction Algorithm Scalable to Freeway Networks with Many Nodes with Arbitrary Travel Routes[C]∥Proc of the 84th Annual Meeting of Transportation Research Board.Washington D C:Transportation Research Board,2005.
[10]Braian L.S,Michael J.D.Short-term Traffic Flow Prediction:Neural Network Approach[R].Transportation Research Record 1453,Washington,D.C:TRB,1994:98-104.
[11]朱 中,杨兆升.实时交通流量人工神经网络预测模型[J].中国公路学报,1998,11(4):89-92.
猜你喜欢
工会博览(2022年5期)2022-06-30
中国交通信息化(2021年2期)2021-07-22
建材发展导向(2019年11期)2019-08-24
装备制造技术(2018年8期)2018-10-17
汽车维护与修理(2018年1期)2018-04-04
作文周刊·小学一年级版(2017年27期)2017-08-10
中国交通信息化(2017年9期)2017-06-06
工业设计(2016年11期)2016-04-16
汽车维护与修理(2015年5期)2015-02-28
