无人机的鲁棒控制方法研究
2013-10-19 10:14:36杜燕军
河南科技 2013年11期
杜燕军
(中国人民解放军96626部队,北京 10010)
从应用科技角度分析,无人机是多种高科技理论应用的集成体,采用了无线电遥控设备和自动程序控制装置,在无人操控条件下自动完成指令任务。鲁棒控制法是无人机研制的新型科技,其结合鲁棒控制理论对无人机实施自主调控,保证了无人驾驶飞机的稳定运行。本次分析了无人机的鲁棒控制方法,对实际控制操作提出了相关建议。
一 鲁棒控制的概述
1.鲁棒性
工业科技发展使得人们更加依赖于自动控制技术的应用,实际作业条件下也出现了不同的异常状态,进而影响到了自动控制性能的发挥。“鲁棒性”是在异常状况下提出的控制概念,主要是指某一设备能否在故障状态下维持正常的运作功能,这便是控制系统的鲁棒性,如图1。举一实例,计算机控制系统是自动控制技术应用的典范,软硬件设施受到外界环境干扰时易发生程序错误、指令失控、装置过载等问题。若此时软硬件系统执行自动化处理模块,维持了计算机设备的正常运转,实际操作功能未受到任何影响,这便是计算机鲁棒性的表现。

图1 鲁棒性
2.鲁棒控制
自动控制技术是现代科技创新的先进成果,自动控制系统借助各种功能性装置而实现了多元化控制模式,用自动控制器取代了人工操作模式,显著提升了机械、电气等设备的可调度性。基于鲁棒性特点下,科技研究领域提出了鲁棒控制方法,这种系统是对原始自动控制模式的优化改进。鲁棒控制是指针对工业自动化控制实施的改造方案,采用了数字化运算模型为支撑平台,对控制模型的不确定性给予调控,从而实现了自动控制功能的升级。鲁棒控制是基于鲁棒性理论的一种新方法,通过设置高性能的控制器为辅助,按照被控制对象的操作要求调控。并且当控制系统的功能、结构、外形等参数发生异常变化时,依旧能维持设备或元件应有的功能状态,此种方法则是“鲁棒控制”。
二 无人机鲁棒控制的特点
随着科学技术的快速发展,我国对于无人机研究的进程不断加快,并且在现有技术条件下研发了更多的配套设施,保障了无人机装置功能的有效的发挥。相比于传统飞机驾驶模式,采用鲁棒控制方法之后,无人机的应用功能进一步提升。
1.自动性。自动控制系统是无人机最基本的应用特点,配备了无线电遥控装置、自动控制程序等核心结构,对飞机驾驶操作实施自动化调度。鲁棒控制理论指导下,无人机研制的控制系统更加先进,不仅满足了自动控制操作的要求,也能对遥控器进行更全面的改造。
2.安全性。从实际应用情况看,无人机常用于执行危险性的任务,特别是在军事侦察、勘测等方面的应用更多。相比于载人飞机,无人机的安全系数更高,执行任务时不会造成人员方面的伤亡。无线通信是无人机的主要技术合成,GPS技术融入新型无人机研制方案中,扩大了飞机的通信传输面域,方便了遥控信号的定位传输。
3.高效性。近年来,无人机的鲁棒控制技术日趋成熟,显著降低了无人机的故障率,维护了飞机内外部装置的持久应用,这些都为无人机循环利用提供了有利的条件,提升了资源的实用性。例如,鲁棒控制方法应用无线电遥控,可对无人机实施跟踪、定位、遥控、监测等多方面的安全控制。
三 Matlab下无人机的建模与仿真
对无人机的鲁棒性进行模拟仿真,需要借助先进的模拟软件才能实现,这是保证模拟结果准确性的前提。Matlab是一款比较实用的商业数学软件,用其作为无人机模拟控制器,可以加快对无人机性能的综合调度,客观地反映出无人机工作状态。此数学软件能够对无人机鲁棒性实施自动化运算,结合所得数据判断出无人机所处的功能状况,这涉及到了算法优化、数据分析、语言交换等应用。本次Matlab下无人机仿真建模的技术应用。
1.C MEX S-Function下的模拟
C MEX S-Function是计算机C语言下编制成的S函数,每一种函数都有不同的使用功能。从功能角度划分,主要涉及到七大结构,第一部分是宏观定义区,Matlab模拟仿真中涉及到的头文件、源文件等,都是此技术定义的范围。其余6个结构,则交由S-Function函数执行,模拟流程如图2。
2.Simulink下的模拟
结合无人机控制模拟,其主要包括气动数据解算、状态/运动方程解算等。前者有发动机推力、阻力系数、侧力系数、升力系数等,后者主要分为计算无人机状态、计算无人机运动方程等模块。设定Simulink模型库,能够掌握各个模块的使用功能,并且结合Matlab软件加快数据的自动化处理。操作使用中可按照建模情况,对系统扩展能力及时地调整,确保无人机在相对稳定的状态下运行。
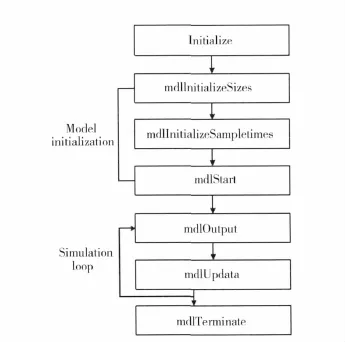
图2 C语言编程下的S函数
3.基于Matlab的模拟
参照12维的状态及运动方程,结合无人机模型的结算流程,便可以正式执行无人机模拟动态。本次基于Matlab的Simulink模拟中,实现过程与解算流程:气动数据解算模块按照飞控部分输出的舵机状态,对参数与信息流程实施控制,借助气动数据的差值算法对力矩系数进行计算。对于模拟计算所得的结果,交由无线网络传输机传感器实施对点传递,为无人机控制提供了指导。
四 基于Matlab仿真的鲁棒控制
自动控制是无人机研制的主要科技之一,控制系统按照无人机内装置结构及控制单元进行编排,拟定了与无人机相配套的自动化控制平台,维持了飞机原有的功能特性。鲁棒控制理论应用于无人机操控指导,显著提升了机载装置控制的效率,加快了新型战机应用模式的改革速度。本次结合无人机作业的具体情况,对鲁棒控制方法的应用进行阐述,具体如下:
1.无线传输。无线图像传输作为一个特殊使用方式也逐渐应用于无人机控制,这是鲁棒控制方法的常见形式。无人机本质上是一种远程遥控式的不载人飞机,通过无线网络传输以执行控制指令。无线传输网的鲁棒性相对稳定,不会因为无线网络变动而失去了原有的控制性能。无线传输网具有安装方便、灵活性强、性价比高等特性,使得更多行业的监控系统采用无线传输方式,建立被监控点和监控中心之间的连接。
2.远程协助。遥控人员在异地通过计算机网络异地拨号或双方都接入Internet等手段,联通需被控制的计算机对无人机性能进行维护,遇到突发情况可以保证飞机及其装置的稳定性。鲁棒控制法中将被控无人机的工作状态显示到主控计算机之上,通过本地计算机对远方计算机进行配置、软件安装程序、修改等工作。远程协助控制时通过局域网络实现远程开机,加快了无人机在故障状态下的恢复进程。
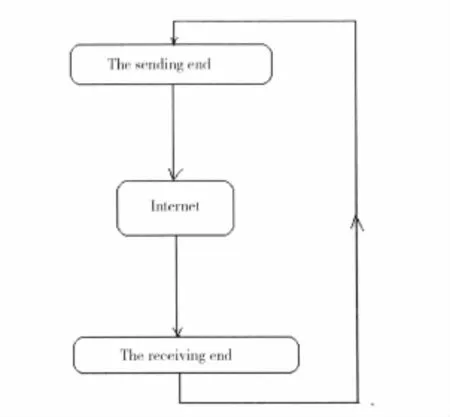
图3 远程控制
3.故障诊断。应用鲁棒控制方法对无人机进行检测,不仅提高了地面对空中飞行轨迹的控制引导,也实现了无人机监控操作的高效性。以飞行速度监控为例,系统故障诊断是对系统运行状态和异常情况作出判断,并根据诊断作出判断为系统故障恢复提供依据。要对鲁棒控制系统进行故障诊断,首先必须对其进行检测,在发生系统故障时,对故障类型、故障部位及原因进行诊断,最终给出解决方案,实现故障恢复。
4.智能控制。随着无人机使用范围的扩大化,对鲁棒控制系统研究的层次更加深入。军事工程不仅要灵活地应用鲁棒控制方法,还要对其中存在的控制问题及时防范,提高无人机装置的可调度性能。自动控制器是借助鲁棒控制理论研制而成的,智能操作是一类无需人的干预就能够自主地驱动机器实现其目标的自动控制,也是用计算机模拟人类智能的一个重要领域。
五 结论
无人机在我国军事工程中得到了普及应用,其能够按照人工操作要求执行各种危险性的任务,并且完全受控于地面指挥中心。无人机采用了无线电遥控设备和自动控制程序,实现了超远程的人机控制一体化。鲁棒控制是无人机自动控制技术的必备形式,其能够在自动控制故障状态下,使机载装置维持原有的功能,降低了无人机事故的发生率,是现代无人机研制的重要控制技术。
[1]黄赋光,谢运祥,杨苹;新型Boost逆变器的积分滑模控制[J];电力电子技术;2004年01期;
[2]朱荣刚,姜长生,邹庆元,蔡世龙;新一代歼击机超机动飞行的动态逆控制[J];航空学报;2003年03期;
[3]陈谋;姜长生;吴庆宪;;基于多模型方法的全包络鲁棒飞行控制器设计[J];航空学报;2006年03期;
[4]吴德伟,高晓光,陈军;战术数据链的建设与发展[J];火力与指挥控制;2004年01期;
[5]陈谋,姜长生,吴庆宪,曹邦武;基于RBF神经网络的一类不确定非线性系统自适应H_∞控制[J];控制理论与应用;2003年01期;
[6]唐功友;吕杉杉;董瑞;;具有控制时滞的离散系统的无抖振滑模控制[J];控制理论与应用;2008年06期;
[7]施阳,慕春棣;基于线性参数神经网络的非线性系统稳定自适应控制[J];控制与决策;2000年04期。
猜你喜欢
装备制造技术(2021年4期)2021-08-05 07:39:12
农业机械学报(2020年2期)2020-03-09 07:35:30
中华建设(2019年7期)2019-08-27 00:50:18
自动化学报(2019年6期)2019-07-23 01:18:22
电子测试(2018年6期)2018-05-09 07:31:47
厦门理工学院学报(2016年1期)2016-12-01 04:50:41
北京航空航天大学学报(2016年7期)2016-11-16 01:51:01
系统工程与电子技术(2016年4期)2016-08-24 07:46:18
项目管理技术(2016年12期)2016-06-15 20:29:33
铁道通信信号(2016年12期)2016-06-01 12:11:58