
挤压式状态切换吸振器设计
2013-10-14 06:56方坤伦周杰赵君麟
机械制造与自动化 2013年5期
方坤伦,周杰,赵君麟
(南京理工大学机械工程学院,江苏南京 210094)
0 引言
振动是工业生产与日常生活中普遍存在的物理现象,在大多数情况下振动均有害,常干扰机器设备正常运行、破坏房屋建筑承载结构、发出噪声污染环境,因此,要对有害振动加以控制。控制振动方法最常见的有消振、隔振和吸振[1]。消振是消除或减弱振源的自身振动,是一种治本的方法,但很难实现。隔振是在振源和受控对象间增加隔振元件,以降低受控对象对振源的反应,在工程中应用较广泛,如高层结构抗风、大跨结构抗震等。吸振是在主体上附加一个子系统产生吸振力从而反作用于受控主体,以降低主体振动,一般可与隔振方法同时使用,在隔振基础上可进一步控制主体振动。吸振分为被动吸振和主动吸振。1902年Frahm发明了动力吸振器(dynamic vibration absorber DVA),至今已有近百年的历史。动力吸振器一般是由振子和弹性元件以及阻尼元件组成。由于它具有结构简单,能有效地抑制频率范围变化较小的结构与设备的振动的优点,因此在工程实践中得以广泛的应用。但传统的动力吸振器的有效吸振带宽极窄,一般只针对振动系统的一个频率[2]。而实际的振源往往复杂而且频带变化较大,这就大大限制了动力吸振器的应用范围。主动吸振又分为全主动控制吸振和半主动控制吸振[3]。全主动控制吸振器是一种利用主动力来实现振动控制的装置。它在传统的被动式吸振器的基础上引入了能够实际控制的主动力环节。其工作原理是利用主动力环节为减振对象提供一个与激励力等值反向的主动力,使其与激励力相抵消从而达到振动控制的目的。全主动式动力吸振器的最大优点是在其工作范围内可以达到极高的减振效果,而且其吸振频段相对于传统的动力吸振器也有较大拓展。然而,全主动式动力吸振器的缺点在于其需要附加较大的能量,特别是当减振频率远离其固有频率时,所需附加的能量会急剧上升,增加了系统的复杂性,降低了整个系统的稳定性。半主动控制吸振器是一种参数调节式动力吸振器,其基本组成与传统的被动式吸振器相同,不同的是其内部参数可调。其只需要较少的能量就可以实现自身的某个参数可调,从而改变自身的固有频率。通过这种方式它可以实现对激励力频率的实时跟踪,使吸振器保持在最佳的减振状态。
磁流变弹性体(magnetorheologieal elastomers)是磁流变材料的一个新的分支,它是由软铁磁性颗粒和聚合物基体组成,它的力学、电学诸性能可以由外加磁场来控制。即在磁场作用下,磁流变弹性体内部颗粒被磁化后,产生相互作用力。在磁流变弹性体受到形变时,这些磁力在其内部形成反向力矩,增强材料抵抗变形的能力,这种能力会随着磁场的变化而发生变化。从宏观上看,表现为弹性模量随磁场而变化,即磁流变弹性体的刚度随磁场而变化。因此,磁流变弹性体在外加磁场下会产生磁致模量和磁致阻尼。这种现象统称为磁流变弹性体的磁致效应[4]。同时,内部的软磁性颗粒具有较小的剩磁,故磁流变弹性体在磁场作用下还具有良好的可逆性。由于它兼有磁流变材料和弹性体的优点,如响应快,可逆性好,可控能力强等,又克服了磁流变液沉降、稳定性差等缺点,因而近年来成为磁流变材料研究的一个热点。
根据磁流变弹性体的受力方向和外加磁场方向的不同,可以分为不同的工作模式。目前常用的两种工作模式为剪切式和挤压式,剪切式,这种工作模式下的磁流变弹性体其外加磁场方向与颗粒的成链方向平行,而外加载荷的方向与成链方向垂直,颗粒链受到剪切,所以称之为剪切模式。挤压式,在这一工作模式下的磁流变弹性体,其外加磁场方向与颗粒的成链方向是平行的,而外加载荷方向与成链方向也平行,即基体中的颗粒受到挤压,因此称之为挤压式。在这一工作模式下的磁流变弹性体减振器具有非常强的非线性,但其结构简单,可以承受较大的载荷,本文设计的磁流变弹性体减振器即工作在这一模式下。
1 磁流变弹性体材料的制备
磁流变弹性体的基本制备方法主要分为有磁场制备和无磁场制备两种。为获得更大的磁流变效应,提高系统的灵敏度,本文选用有场下制备磁流变弹性体。
1.1 实验材料及主要设备
Ni粉、天然橡胶、橡胶防老剂RD、液体石蜡、硫化促进剂DM、硫磺粉、天平、双辊炼胶机、电热式平板硫化机、模具、隔热手套、直流稳压电源。
1.2 实验步骤
称取10g天然橡胶、5gNi粉、0.3g橡胶防老剂 RD、0.3g液体石蜡、0.1g硫化促进剂 DM、0.3g 硫磺粉;启动炼胶机,将辊距调至适当距离。放入天然橡胶,辊炼片刻。然后交替加入Ni粉、RD、液体石蜡、硫磺粉、DM。充分辊炼混合物20~30min,辊炼均匀后取下混合物,放置24h;将电热式平板硫化机的硫化温度调至80℃,然后将模具放置在硫化机的下平面中间,启动硫化机加热模具。等待硫化机的温度升至调定的数值;带上隔热手套,取下模具。用剪刀剪下适量的橡胶、Ni粉的混合物,放入到模具的型腔,然后把模具放进平板硫化机。用导线连接模具和直流稳压电源,调节电源电压为20V,此时模具线圈中的电流为1A、模具型腔中的磁场强度为1T。维持此时的温度和电压10min,让橡胶基体中的Ni粉在模具的磁场中形成有序结构;调节硫化机的硫化温度为153℃,保持此温度10min,让橡胶完成硫化过程;关闭硫化机和直流稳压电源,取下模具,让其自然冷却至常温。开模,取下制备完成的磁流变弹性体。试验中所用模具及制备出的磁流变弹性体如图1所示。

图1 磁流变弹性体
2 吸振器结构设计
2.1 吸振器磁路材料的选择
根据磁流变弹性体的工作原理可知,磁路中的磁场是动态变化的,因此导磁材料应易被磁化、退磁迅速,其磁滞回线所包围的面积小,矫顽力低。同时,为了保证磁流变弹性体的工作区域中的磁场强度,导磁材料要有高磁导率、低剩磁特点。综上,本实验选择电工纯铁作为吸振器磁路材料,能满足本实验的刚强度要求。
2.2 磁路设计
磁路设计的目的,是设计一个低磁阻的磁路,使得工作区域的磁场能量最大化。而在其他非工作区域,尽量减少能量的损失,减小不必要的漏磁。
磁路设计的典型步骤:1)根据磁流变弹性体的饱和磁化强度,确定磁路中最小磁通量的数值;2)根据串联磁路磁通量处处相等,和φ=BS(φ为磁通量,B饱和磁化强度,S为磁通面积)确定各磁路的磁路横截面积比例;3)选择线圈匝数和电流,NI=∑Rm,Rm为各磁路的磁阻;4)考虑到结构复杂性和发热等因素,选择合适的电流,从而确定线圈匝数。本实验设计的吸振器如图2。
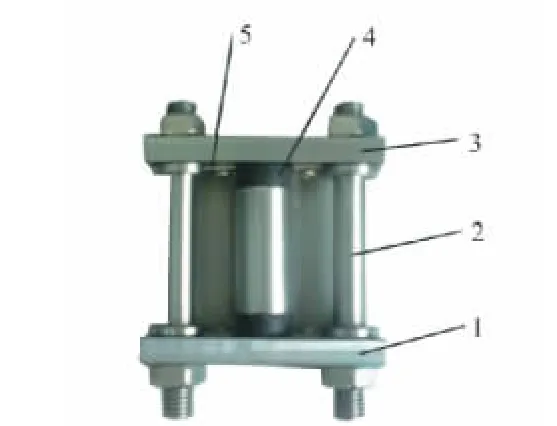
图2 状态切换吸振器实物图
3 结语
本文概述了传统动力吸振、全主动吸振、半主动吸振技术的各自特点,以及将磁流变弹性体应用于半主动吸振的独特优点。并从设计实用型磁流变弹性体吸振器的角度出发,试制了高性能的磁流变弹性体,设计制作了实用型的吸振器。为以后高性能的状态切换吸振器的设计与优化打下了基础。
[1]顾仲权,马扣根,陈卫东.振动主动控制[M].北京:国防工业出版社,1997.
[2]Chen Y,David G Z,Viresh K W R,et al.[J].Chinese Journal of Aeronautics,2003,16(4):203-211.
[3]邓华夏.磁流变弹性体半主动吸振器吸振技术的研究[J].中国科学技术大学,2007.
[4]魏克湘,孟光,等.磁流变弹性体隔振器的设计与振动特性分析[J].机械工程学报,2011,11(47):69-74.
猜你喜欢
汽车实用技术(2021年16期)2021-09-09
传感器世界(2018年5期)2018-11-16
微特电机(2016年9期)2016-12-20
橡胶工业(2015年10期)2015-08-01
电子设计工程(2015年3期)2015-02-27
橡塑技术与装备(2015年3期)2015-02-24
橡胶工业(2015年4期)2015-02-23
橡胶科技(2015年2期)2015-02-23
噪声与振动控制(2015年4期)2015-01-01
噪声与振动控制(2015年4期)2015-01-01
