基于Fuzzy-PID控制的程控电流源设计
2013-10-13 11:50范山东崔师明
机械制造与自动化 2013年1期
范山东,崔师明
(1.黑龙江科技学院电气与信息工程学院,黑龙江哈尔滨 150027;2.黑龙江林业高级技术学院,黑龙江绥化 152061)
电流源在仪器仪表标定、校验、设备检测中应用广泛,为了便于电流的设定与调节,实际的电流源都是通过压控变换电路实现,通过调节输入电压控制输出电流的大小。一般都是采用开环控制,即利用微处理控制电路,经D/A转换器和V/I转换电路来实现。系统框图如图1所示。

图1 程控电流源开环电路
这种实现方法是一种开环式的,通过调节输入电压手动调节输出电流的大小,但这种地阿牛的输出效果系统并不知道,造成电流的输出精度不高,无法达到高精度要求。为此,在传统开环电路基础上利用控制系统中的反馈控制,给电路加上反馈电路,软件上利用积分分离PID算法实现输出电流的精确控制[1-2]。
1 硬件设计
系统利用STC89C52单片机将被预置的电流通过换算由TLC5615进行D/A转换,实行电压输出,并驱动V/I转换实现电流输出,同时将该电流值对应的电压通过闭环回路,经信号处理电路,用高精度的采样电阻进行电流采样,利用ADC0832进行A/D转换输入单片机系统组成闭环负反馈,单片机系统通过PID算法调整电流输出,并驱动显示电路显示当前电流值。具体电路如图2所示。

2 模糊PID控制器的设计
系统硬件电路的设计使得整个电路构成一个闭环,为PID算法的实现提供了硬件基础。PID控制工业上很早应用的一种经典的控制策略,PID控制算法简单、可靠性高、鲁棒性好,被广泛应用到过程控制中。但它对具有非线性(饱和、时延、回程等)和不确定性等特征的系统很难达到预期效果。
2.1 系统的控制原理图
在本系统中采用模糊与PID算法相结合的Fuzzg-PID控制,控制原理图如图3。

图2 系统硬件原理图

图3 Fuzzy-PID控制器的原理图
模糊推理过程为两输入三输出的系统。两个输入分别为系统误差E和误差的变化率EC,输出为PID的三个控制参数 Kp,Ki和 Kd。
2.2 模糊控制规则库和隶属函数的设计
模糊控制设计的核心是总结工程设计人员的技术知识和实际操作经验,建立合适的模糊规则表。本文选用工程上最常用的线性控制规则库(表1)和标准三角形隶属函数[-1,1](图4)。将模糊化后的输入变量 E,E分为负大、负中、负小、零、正小、正中、正大七个模糊集合,分别表示为表1 中的 NL,NM,NS,ZR,PS,PM,PL。
Kp的语言变量为:{NB,NM,MS,O,PS,PM,PB}
Ki的语言变量为:{NB,NM,MS,O,PS,PM,PB}
Kd的语言变量为:{NB,NM,MS,O,PS,PM,PB}
E 和 EC的论域均为:{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6}
Kp,Ki,Kd的论域均为:{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6}

表1 线性控制规律库

PS NM NS ZR PS PM PL PL ZR NL NM NS ZR PS PM PL NS NL NL NM NS ZR PS PM NM NL NL NL NM NS ZR PS__NL NL NL NL NL NM NS ZR

图4 输入和输出变量的隶属函数
PID参数模糊整定就是找出PID三个参数与误差E和误差变化率EC之间的模糊关系,运行中通过不断检测E和EC,由模糊控制原理对三个参数进行实时修改,以用来满足不同E和EC对控制参数的不同要求,以致使被控制对象有良好的动、静态性能[3]。
2.3 模糊控制查询表

利用m文件生成模糊控制查询表,整理后的模糊控制查询表如表2、表3和表4所示:

表2 Kp模糊控制查询表

表3 Ki模糊控制查询表

表4 Kd模糊控制查询表

1 -3-2-2-1-1 1 2 2 3 4 4 5 5 2 -3-2-2-1 0 2 3 3 3 4 4 5 6 3 -1-1-1 1 2 2 3 4 4 4 5 5 6 4 0 1 0 2 3 3 3 4 4 5 6 6 6 5 1 1 1 2 3 3 4 4 4 5 6 6 6 6 0 1 0 2 3 3 4 4 4 5 6 6 6
2.4 系统仿真
用上述方法分别设计PID,FLC和Fuzzy-PID控制器,FLC和Fuzzy-PID的模糊控制规则库和输入输出变量隶属函数与2.2条相同。下面是三种控制器的性能比较,和Fuzzy-PID控制器在三种参数的性能比较[5]。
a)三种控制器的参数设计为:1)PID:Kp=0.4,Ki=0.09,Kd=0.5;2)FLC:Kp=1,Ki=0.45,Kd=2.4;3)Fuzzy-PID:Kp=0.7,Ki=0.2,Kd=0.6;在单位阶跃信号输入下,三种控制系统的仿真结果如图5所示。
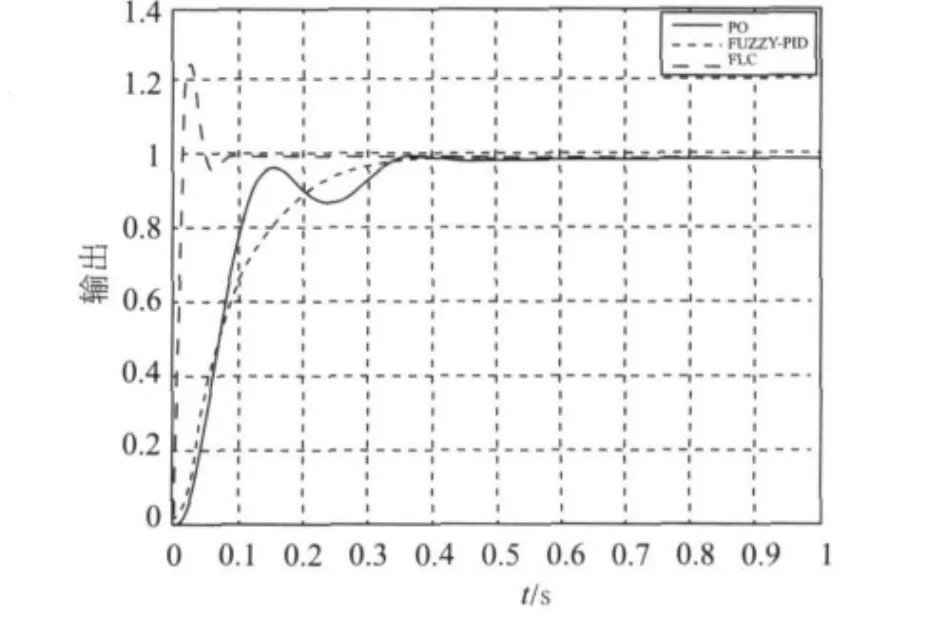
图5 三个控制系统的仿真
b)三种参数下的Fuzzy-PID控制器的响应曲线:1)Kp=0.5,Ki=0.1,Kd=0.5;2)Kp=0.65,Ki=0.12,Kd=0.6;3)Kp=0.45,Ki=0.12,Kd=0.5;在单位阶跃信号输入下,其响应曲线如图6所示。

图6 三组参数下Fuzzy-PID系统的响应线
2.5 仿真结果分析
在单位阶跃信号输入下,三种控制系统的仿真结果如图5所示,可见,Fuzzy-PID控制系统和 PID,FLC系统一样,在单位阶跃输入下为无差系统,且具有较好的动态品质。它的优点是与PID相比,其初始能量较小;与FLC相比,Fuzzy-PID的响应更快,上升时间更短。而在三种参数下的Fuzzy-PID控制器的响应曲线如图6所示,从图6上可见第二组数据综合性能最好,响应速度快又无超调。
3 结论
根据仿真结果分析,确定Kp=0.65,Ki=0.12,Kd=0.6时系统的性能最好。该程控电流源的性能指标为:量程0~2 A,电流调整精度<0.4 mA,误差<0.1%,稳定时间<4 s,系统响应曲线如图6所示。采用Fuzzy-PID控制器设计系统,比传统的PID控制的电流源在控制精度上更高,对于系统出现的非线性因素有很好的抑制作用,鲁棒性更好。如果想进一步获得更理想的参数,可以利用遗传算法对对参数进行细调和优化。
[1]刘金琨.先进PID控制MATLAB仿真[M].3版.北京:电子工业出版社,2008.
[2]Koksal Erenturk.Matlab-based GUIS for fuzzy logic controller design and applications to PMDC motor and AVR control[J].Comput Appl Eng Educ,Wiley Peri-odicals Inc,2005,(13):10-25.
[3]王琦.精密程控电流源的设计及应用[J].国外电子元器件.2005,(10):30-34.
[4]苗敬利.模糊控制和传统PID控制的仿真研究[J].微软计算机信息,2003,(07).
[5]沈伟.模糊控制在工业控制系统中的应用[J].管道与技术设备,2003,(5).
猜你喜欢
黑龙江大学自然科学学报(2021年4期)2021-11-19
科学咨询(2020年53期)2020-03-19
商品与质量(2019年22期)2019-11-29
科学导报·学术(2019年44期)2019-09-10
电子制作(2018年19期)2018-11-14
天津教育·下(2018年9期)2018-07-13
电子制作(2016年1期)2016-11-07
电子制作(2016年23期)2016-05-17
电测与仪表(2014年14期)2014-04-04
赤峰学院学报·自然科学版(2014年1期)2014-03-23