基于EON的轮式推土机保障虚拟训练系统设计
2013-10-13 11:50钟晓谷苏凡囤王海涛王小飞
机械制造与自动化 2013年1期
钟晓谷,苏凡囤,王海涛,王小飞
(解放军理工大学工程兵工程学院,江苏南京 210007)
0 引言
轮式推土机由于其机动性强、工作效率高等优势被广泛用于国防工程建设、民用建筑、修建道路、修建机场中。但因其工作环境恶劣,施工难度大,导致该机械故障率高,保障难度大。因此,迫切需要训练有素的保障人员。传统的训练方法由于其训练周期长、训练效益低且受到场地和成本的限制已经无法满足目前的训练要求。因此,在对该推土机的保障人员培训过程中,急需一种现代高效的训练手段来解决上述问题。
虚拟现实技术[1]以其良好的沉浸性、交互性等优点,被广泛应用于航空航天、核能、军事等领域;虚拟训练作为虚拟现实技术的重要分支能够提供具有良好沉浸感、交互性和启发性的虚拟环境,使设计者能更早地“看到、修到和用到”未来的产品,并通过虚拟操作和过程仿真进行分析评估[2];目前主要应用于装备的保障训练、维修性设计以及保障性设计等三个方面的研究;虚拟训练不受时空限制,仿真度高、扩展性强,特别适合于专业保障训练,是保障训练现代化的重要标志。

图1 虚拟训练系统框架
1 系统框架设计
在虚拟环境下,模型的建立和维修过程的实现有其特殊性,根据现实情况下的维修保养要求,将系统主要划分为4个模块:工作原理、保养训练、拆装训练、故障排除。训练过程中,用户可以通过训练渐进式的了解装备的构造、性能、原理、维修保养方法等知识。系统框架规划如图1所示。
2 系统的关键技术
2.1 三维数字建模技术
推土机结构复杂,组成零部件多,为真实再现其结构及组成,分三步实现其零部件建模:先选择AutoCAD按实际尺寸构建模型外形,然后将模型导入到3DS MAX中进行纹理、材质、颜色、灯光等处理,并对其进行填充,随后将其导入至EON Studio中赋予各种交互式的动作。图2为EON中推土机的实装模型。
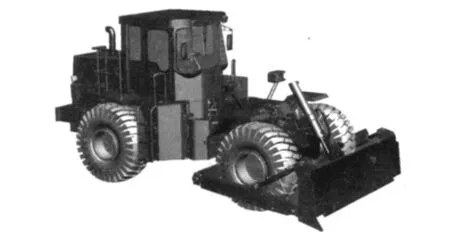
图2 推土机实装模型
本文论述的虚拟维修是建立在整机模型的基础上的,如果不考虑优化而直接导入模型,会严重降低系统运行的实时性。为了提高系统运行效率,利用LOD技术,将除需要操作的零部件以外的所有部件进行优化,隐藏了被遮挡零件,整机模型以空壳状导入虚拟维修场景。
2.2 虚拟环境构建
构建虚拟维修场景之前,首先要将通过外部建模工具创建的模型导入到虚拟开发平台EON Studio中。EON Studio支持多种格式的3D数据导入。其中包括常用的3DS,obj,wrl等格式文件的导入[3]。
模型导入场景之后还需要对场景进行观察点、灯光、材质的调整。首先新建Frame节点并取名为Camera,将其关联复制到ViewPoint节点的扩展域中;然后在Camera节点下添加light节点并选择灯光类型为Ambient(环境光),调整环境光的颜色;最后删除零件重复的Material(材质)节点,为每个零件建立单独的Material材质。
由于采用的导入方式不同或导入过程中部分信息丢失,会有部分的部件没有材质或贴图,或者贴图不正确。这时需要对这部分模型进行材质和贴图的添加或调整,首先给Texture节点指定贴图,然后将Texture节点的快捷方式复制到Material节点的DiffuseTexture文件夹下,最后将Material节点的快捷方式复制到部件所在文件夹的Material中,完成贴图的添加。如图3所示。


图3 贴图添加的实现过程
2.3 系统的仿真与交互
虚拟训练过程中,不仅涉及对象的几何模型,同时要考虑其在虚拟场景中的位移、碰撞、变形等动态的变化。这些问题同样是目前虚拟训练系统中的难点问题。合理的建立对象的层次结构模型、配合约束关系模型,并引入了与结构关系对应的邻接矩阵。有效地规划虚拟拆装序列,是实现虚拟维修交互控制技术的基础。
以虚拟拆卸转向系统为例。首先确定装配体的层次关系模型和约束关系模型。装配体层次结构模型是将一个产品分为不同层次的字装配体和零件在一定程度上能够反映装配体的拆装序列[4],然后建立矩阵,生成并优化拆卸序列,图4为转向系统的层次结构模型在虚拟平台中的树形表式形式,这种树形表示可以通过逐层打开节点方式来查看零件归属[5]。

图4 层次结构模型在Eon中的树形表示
a)拆卸过程仿真
在 Eon 中综合使用 Frame,ClickSensor,Place,Task 和DragSelect节点根据零件之间的层次结构关系以及约束关系就可以实现拆卸过程,如图5所示,其具体设置如下:
Step1:首先依据零件之间的层次结构为具有约束关系的零件添加一个Frame框架;
Step2:在框架中选择需要拆卸的零部件添加2个ClickS-ensor节点以及一个Place节点和一个DragSelect节点;

图5 交互过程Routes视窗展示
Step3:将其中一个ClickSensor节点的触发方式设置为Right并通过OnButtonDowntrue和DragSelect下的Select相连接;
Step4:将另外一个ClickSensor节点的触发方式设置为Left并通过OnButtonDowntrue和Place节点下的SetRun相连接,Place节点通过OnRunfalse与Task节点下的RequestCompleted相连。
当点击开始拆卸后,点击鼠标左键即可拖拽需要拆卸的零件,当点击右键时,可以快捷的将零件放置到桌面上。如图6所示。
图6 转向器虚拟拆卸过程
当遇到几个零件位置相似时,可以让他们同步地拆卸或装配。只要让用于触发的信号同时接到这几个零件所具有的移动功能节点place和方位节点position节点,让它们的相对位移相同、时间相同即可。通过以上步骤就可以实现拆卸过程的人机交互,如图7所示。
b)故障排除过程仿真
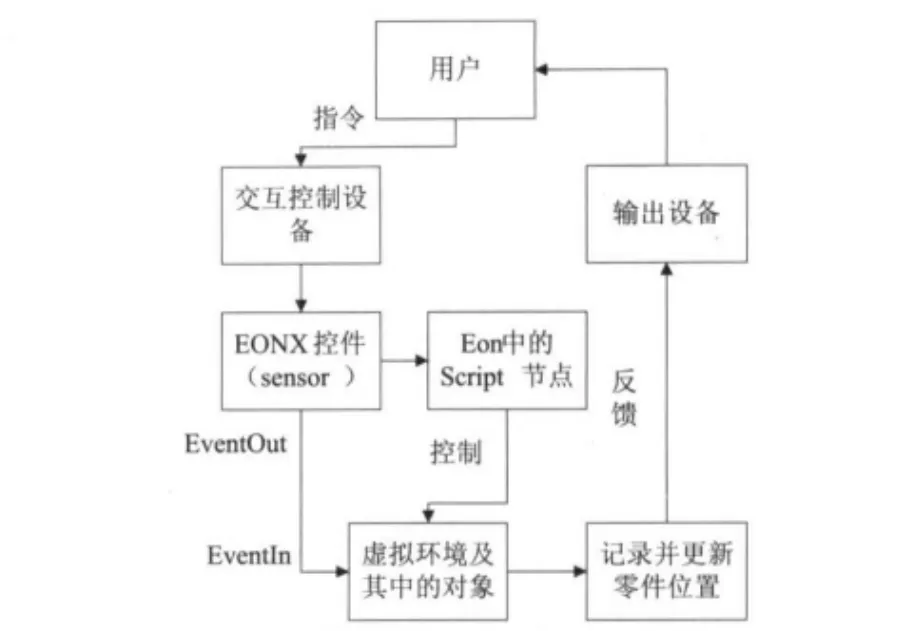
图7 零件拆卸时人机交互过程
虚拟故障排除模块中挑选了比较有代表性的主液压系统压力偏低这个模块来进行讲解。这个模块中运用虚拟的压力表来对系统压力进行测量,因为应用到各种工具和仪表,如果在测量位置和工具摆放位置间进行视角的切换话,切换的次数较多,容易造成操作者视觉的疲劳,所以设置一个小视窗正对着操作台,用到的各种工具、仪器等整齐的摆放在操作台上,可以通过小视窗来实现工具的拾取和放置,避免了视角的频繁切换。首先讲解一下小视窗的设置方法:添加一个Viewport节点到Viewports文件夹中,双击添加的Viewport节点设置其起始位置、视窗的大小以及可视范围等参数;添加一个摄像机Camera,并把它的快捷方式放入添加的Viewport节点的Camera文件夹内;通过调整添加的Camera观察位置就可以实现主窗口和小窗口分别显示,如图8所示。
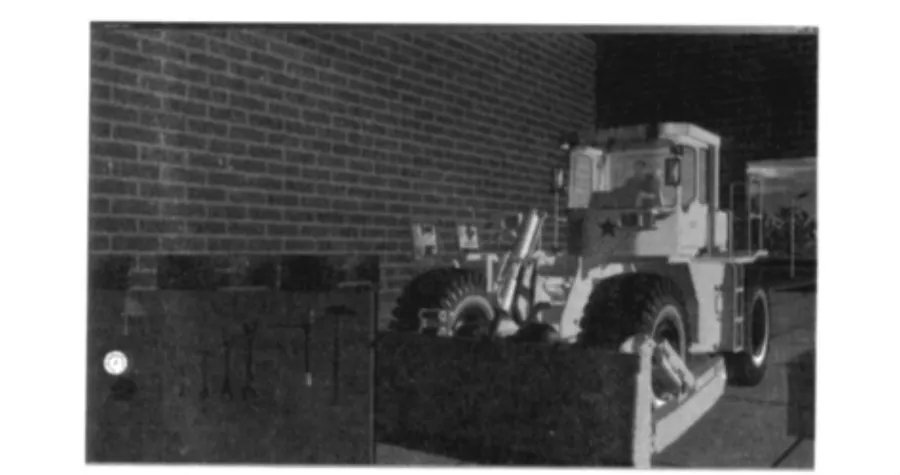
图8 小窗口拾取工具示意图
通过分析压力测量的实际流程,结合系统实现的具体要求,设计虚拟现实中压力测量的实现流程如图9。
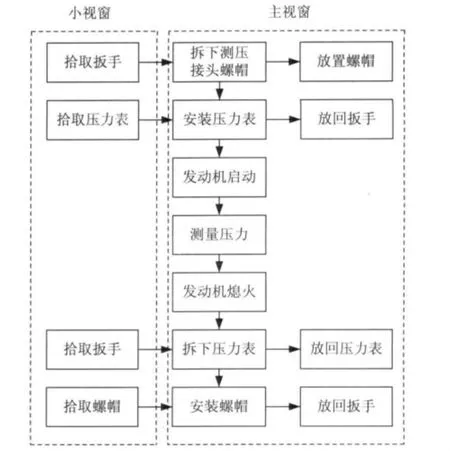
图9 压力测量实现流程图
3 系统的集成
系统数据库维护模块采用Delphi软件设计开发。Delphi是著名的Borland公司开发的可视化软件开发工具,被称为第四代编程语言,它具有简单、高效、功能强大和简单易学的特点。其主界面如图10。

图10 训练系统主界面
通过Delphi调用EONX控件的接口函数实现二者之间的数据传递[6],使系统的仿真程序能够嵌入到Delphi开发的应用程序中,EONX作为一种在其他软件或程序中展示和控制EON虚拟程序的ActiveX控件,通过它可以对EON开发出来的模拟场景进行控制,在EON的事件驱动模型中,节点和节点之间相连接的属性域(EventIn/EventOut)类型必须一致或相互兼容,其数据传递过程如下:
Step1:在逻辑关系设定视窗中创建Scrpit节点与其他相关节点的EventIn节点和EventOut节点的连接,并对EventIn节点收到的数据处理后由EventOut节点输出;
Step2:在Delphi中创建OnEvent消息响应函数On-EventEonx()对Eventout事件进行响应,同时利用SendEvent函数将Delphi处理后的数据输出到InEvent节点。
4 结论
本文结合EON Studio虚拟交互平台,研究解决了某型轮式推土机虚拟训练系统设计中的部分关键性技术问题,所开发的系统可以使受训人员充分掌握轮式推土机保障训练的过程、特点、手段和方法。具有较高的应用价值。
[1]A dam J A.virtual reality is for real.IEEE spectrum[J].1993,31(10):22-29.
[2]刘佳,刘毅.虚拟维修技术发展综述[J].计算机辅助设计与图形学学报,2009,21(11):1520-1534.
[3]余辉,等.EON入门与高级应用技巧[M].北京:国防工业出版社,2008.
[4]张斌.基于虚拟现实技术的印刷机拆装训练系统[D].北京:北京印刷学院,2010,12.
[5]徐鸿翔.面向拆卸和回收设计关键技术的研究[D].南京:南京理工大学,2001,12.
[6]刘诚,付宜利.基于EON的交互式虚拟装配仿真系统的设计与实现[J].东北林业大学学报,2009,37(8):109-111.
猜你喜欢
工会博览(2022年33期)2023-01-12
工会博览(2022年17期)2022-07-15
高技术通讯(2021年1期)2021-03-29
中国军转民(2017年6期)2018-01-31
中国水利(2017年9期)2017-06-07
法律方法(2017年2期)2017-04-18
项目管理技术(2016年6期)2016-05-17
无线互联科技(2015年11期)2016-03-04
Coco薇(2015年10期)2015-10-19
筑路机械与施工机械化(2015年8期)2015-09-11