火箭助飞式反鱼雷鱼雷性能仿真
2013-09-19 05:51王光宇1佩2
水下无人系统学报 2013年6期
王光宇1, 彭 佩2
火箭助飞式反鱼雷鱼雷性能仿真
王光宇, 彭 佩
(1. 海军装备部, 北京, 100161; 2. 海军装备研究院, 北京, 100161)
依据火箭助飞式反鱼雷鱼雷典型作战态势, 建立了相关模型, 仿真了火箭助飞式反鱼雷鱼雷的作战过程。仿真结果表明, 航速和航程对火箭助飞式反鱼雷鱼雷拦截概率有较大影响, 自导作用距离不小于水下航程可以保证较高的拦截概率。
火箭助飞式反鱼雷鱼雷; 拦截概率; 作战过程
0 引言
德国“海蜘蛛”(sea spider)反鱼雷鱼雷直径210 mm, 长2 260 mm, 重115 kg, 采用主/被动自导, 自导作用距离数百米, 于水面舰艇发射时可采用火箭助飞, 以弹道式飞行至入水点, 水下采用高可靠性的固体推进剂水下火箭, 速度快, 用以实施主动快速精确拦截来袭鱼雷。文中从火箭助飞式反鱼雷鱼雷拦截来袭鱼雷过程出发, 建立了水下弹道模型、自导检测判据、命中目标判据, 依据水面舰艇、来袭鱼雷和反鱼雷鱼雷的相关技术参数, 对反鱼雷鱼雷作战效能采用蒙特卡洛法进行计算机仿真, 得出量化的反鱼雷效能结论。通过仿真结果分析得出航速、航程和自导作用距离等核心指标数据对命中概率的影响。
1 反鱼雷作战过程
以水面舰艇报警声纳发现来袭鱼雷开始点为原点, 水面舰艇沿轴直航, 如图l 建立直角坐标系, 坐标系中以轴为基准线。
根据图1, 由命中三角形可以建立航行水平面内的拦截几何关系
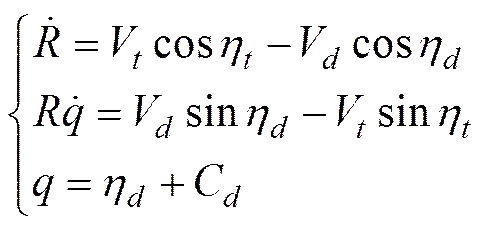
式中:为雷目距离;为目标瞄准线与攻击平面内基准线之间的夹角, 称为目标线方位角;分别为反鱼雷鱼雷和来袭鱼雷的速度矢量;分别为反鱼雷鱼雷、来袭鱼雷速度矢量与基准线之间的夹角, 称之为反鱼雷鱼雷弹道角和目标航向角;分别为反鱼雷鱼雷、来袭鱼雷速度矢量与目标瞄准线之间的夹角。
2 模型及判据建立
2.1 弹道模型
2.1.1 落点散布模型
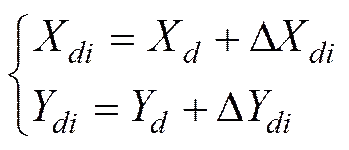
计算反鱼雷鱼雷的落点坐标, 是以观测来袭鱼雷运动要素为基础的, 反鱼雷鱼雷按解算出的目标要素取捷径航行至来袭鱼雷的预计主航向上, 以此确定发射角, 根据指控系统设定的空中飞行平均速度和空中航程, 从而求出平均弹道入水点的坐标(即散布中心坐标), 最后求出每发反鱼雷鱼雷的散布坐标。
散布中心坐标

(3)
则落点散布坐标为
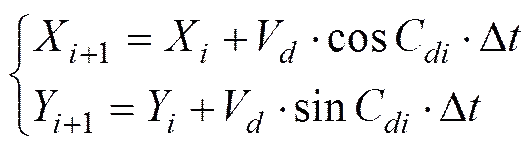
2.1.2 直航搜索段弹道模型
反鱼雷鱼雷在点落水, 通过二次转角沿解算的来袭鱼雷主航向进行反向搜索, 当反鱼雷鱼雷的自导系统未发现来袭鱼雷时进行直航搜索

2.1.3 跟踪导引段弹道模型
当反鱼雷鱼雷自导系统发现来袭鱼雷时, 按照设定导引律进行导引跟踪
2.2 来袭鱼雷弹道模型
来袭鱼雷按照机动方式其弹道模型

2.3 自导检测判据
反鱼雷鱼雷采用主被动联合自导, 在鱼雷搜索期间, 要想使自导装置捕获目标, 必须使目标进入自导装置有效作用范围内, 即目标落入到自导扇面中, 需满足相对距离和相对方位的约束条件。
反鱼雷鱼雷与来袭鱼雷的相对距离

来袭鱼雷相对反鱼雷鱼雷的方位
(9)
2.4 命中目标判据
反鱼雷鱼雷发现捕获目标后, 按照一定的导引律追踪目标, 在追踪段能否命中目标与本身战术技术性能有关, 为了简化计算, 可以通过判断来袭鱼雷是否在反鱼雷鱼雷毁伤半径作用范围之内来判断是否被命中, 具体模型如下。
式中:为反鱼雷鱼雷与来袭鱼雷之间的距离;l为反鱼雷鱼雷毁伤半径, 当符合条件时, 认为拦截成功。
3 仿真想定
3.1 仿真思路
以水面舰艇、来袭鱼雷、反鱼雷鱼雷的相关技术参数为初始条件, 基于蒙特卡洛法建立命中概率仿真计算模型。根据反鱼雷鱼雷作战过程分析及上述弹道模型, 采用龙格库塔算法解来袭鱼雷对我方舰艇以及反鱼雷鱼雷对来袭鱼雷之间的拦截几何关系, 得到三者的实时坐标, 进而根据相关判据, 得到拦截概率。
3.2 误差取值
反鱼雷鱼雷落点散布区域为一椭圆, 为了简化计算, 把它看成一个圆形区域。散布区域以瞄准点为圆心, 落点散布均方差为半径, 散布方向0°到360°均匀分布。根据一般的经验确定计算中涉及的一些误差取值, 对于具体武器使用研究, 应根据具体武器系统的试验参数来确定, 仿真中的主要参数的误差取值略。
4 仿真结果与分析
4.1 拦截弹道仿真
图2为反鱼雷鱼雷成功拦截来袭鱼雷弹道仿真示意图, 图3为反鱼雷鱼雷未成功拦截来袭鱼雷弹道仿真示意图。
图2中, 由于指控系统求解得到的射击诸元较准确, 反鱼雷鱼雷成功占位来袭鱼雷航向, 并且自导成功捕获来袭鱼雷, 当雷目距离小于某一值时, 鱼雷命中来袭鱼雷, 拦截成功。
图3中, 由于各种随机误差的存在, 导致求解得到的反鱼雷鱼雷射击诸元不准确, 在某一距离处, 来袭鱼雷逃离了反鱼雷鱼雷自导扇面的搜索, 最终来袭鱼雷捕获并命中舰艇目标, 而反鱼雷鱼雷则在搜索航向上丢失目标, 直至航程耗尽, 拦截失败。
4.2 拦截概率仿真
4.2.1 水下航速对拦截概率的影响
图4为在设定的仿真计算参数下, 反鱼雷鱼雷拦截概率随水下航速的变化趋势。
如图4所示, 在一定范围内自导作用距离不变的情况下, 水下航速对反鱼雷鱼雷拦截概率影响明显, 武器速度越高打击效果越好, 速度越高接敌时间越短, 目标误差散布越小, 拦截概率就越高。
4.2.2 航程对拦截概率的影响
图5、图6 分别为在设定的仿真计算参数下,反鱼雷鱼雷拦截概率随助飞段航程和水下航程的变化趋势。
如图5所示, 当指控系统解算完毕立即发射鱼雷, 在水下航程固定的情况下, 助飞段航程小于data2或大于data8时拦截概率小于0.75, 前者是由于助飞段航程太小, 导致水下航程不足以跟踪摧毁目标, 后者是设定的助飞段航程太大, 助飞鱼雷落水时刻来袭鱼雷已越过该区域, 助飞鱼雷搜索不到目标。
如图6所示, 在助飞段航程取某一固定数据的情况下, 当水下段航程由data1到data2时, 拦截概率急剧上升, 当水下航程大于data2时, 拦截概率变化比较平缓, 并保持较高的拦截概率。
4.2.3 自导作用距离对拦截概率的影响
图7为在设定的仿真计算参数下, 反鱼雷鱼雷拦截概率随自导作用距离变化趋势。
如图7所示, 当自导作用距离达到data5 时, 拦截概率达到了0.8以上, 比较图6和图7可以发现, 自导作用距离data5 基本覆盖了水下航程data2。这样一来, 反鱼雷鱼雷在落水调姿完毕后就可以探测到来袭鱼雷, 可以最大程度增加自导捕获概率, 进而保证较高的拦截既率。
5 结束语
以上通过对火箭助飞式反鱼雷鱼雷拦截来袭鱼雷作战过程的研究, 建立了基于蒙特卡洛法的仿真计算模型。通过仿真计算, 模拟了拦截弹道, 并定量分析了主要指标对拦截概率的影响, 得到了如下结论。
1) 由于武器系统对来袭鱼雷运动要素的解算存在误差以及来袭鱼雷近程跟踪弹道会受到我舰机动的影响, 反鱼雷鱼雷自导捕获目标时所处位置与目标实际航向之间可能存在较大的横向偏差, 使之处于不利阵位, 高航速有利于反鱼雷鱼雷在追踪导引过程中更快地接近目标航向, 以避免最后的尾追或近程时丢失目标。
2) 助飞段航程的设定既要使水下段航程足以捕获跟踪并摧毁目标又要避免助飞段航程过大, 造成由于火箭助飞式鱼雷落点误差使鱼雷尾追来袭鱼雷或者丢失目标, 水下航程必须大于某一特定值(图6中的data2)才能保证较高的拦截概率。
3) 为保证较高的拦截概率, 反鱼雷鱼雷自导作用距离应不小于水下航程。
[1] 周徐昌, 黄文玲, 高永祺. 鱼雷控制系统分析与设计[M].武汉: 海军工程学院, 1995.
[2] 林贤杰, 贾跃, 赵学涛, 等. 航空自导深弹攻潜效能模型与仿真[J]. 弹箭与制导学报, 2008, 28(4): 131-134.Lin Xian-jie, Jia Yue, Zhao Xue-tao, et al. Anti-submarine Operational Effectiveness Model and Simulation of Aviation Homing Depth Charge[J]. Journal of Projectiles, Rocket, Missiles and Guidance, 2008, 28(4): 131-134.
[3] 张静远, 孟庆玉. 鱼雷战斗使用与作战性能评定[M].武汉: 海军工程学院, 1995.
[4] 姜凯峰, 周明, 林宗祥. 舰载反鱼雷鱼雷作战效率仿真研究[J]. 计算机仿真, 2011, 28 (06): 9-12. Jiang Kai-feng, Zhou Ming, Lin Zong-xiang. Operational Efficiency Based on Simulation of Shipboard Anti-torpedo torpedo[J]. Computer Simulation, 2011, 28 (6): 9-12.
[5] 范作娥, 顾文锦, 姜鹏, 等. 基于蒙特卡洛法的反舰导弹末端机动突防效果研究[J]. 海军航空工程学院学报, 2010 , 25(3): 241-246.
[6] 周明, 徐德明. 火箭助飞式反鱼雷鱼雷弹道的仿真实现与应用研究[J]. 弹箭与制导学报, 2007, 27(2): 235-238.Zhou Ming, Xu De-ming. Infection of Impact Dispersion to the Rocket Assisted Torpedo Detection Probability[J]. Journal of Projectiles, Rocket, Missiles and Guidance, 2007, 27(2): 235-238.
(责任编辑: 许 妍)
Performance Simulation of Rocket-Assisted Anti-Torpedo Torpedo
WANG Guang-yu, PENG Pei
(1. Naval Armament Department, Beijing 100161, China; 2. Naval Academy of Armament, Beijing 100161, China)
Some models of typical operations of a rocket-assisted anti-torpedo torpedo(RATT) are established to simulate the intercept trajectory of a RATT. Simulation results show that the speed and range impose significant influences on the interception probability of a RATT, and the RATT can gain higher interception probability when homing range is no less than the underwater range.
rocket-assisted anti-torpedo torpedo; interception probability; operational process
TJ63
A
1673-1948(2013)06-0469-05
2013-07-01;
2013-08-11.
王光宇(1970-), 男, 研究方向为鱼雷总体技术.
猜你喜欢
小哥白尼(军事科学)(2022年7期)2022-09-20
小哥白尼(军事科学)(2021年8期)2021-11-22
智能计算机与应用(2021年5期)2021-10-05
小哥白尼(军事科学)(2020年8期)2020-05-22
海峡姐妹(2019年5期)2019-06-18
舰船电子对抗(2019年2期)2019-05-23
百科探秘·航空航天(2017年12期)2018-01-31
军事运筹与系统工程(2017年1期)2017-07-31
水下无人系统学报(2016年3期)2016-10-13
航海(2016年2期)2016-05-19