基于单电阻的变频压缩机相电流重构方法*
2013-09-13 06:07黄跃进顾江萍
机电工程 2013年4期
李 岳,徐 鸣,黄跃进,顾江萍,沈 希
(浙江工业大学 机械工程学院,浙江 杭州 310014)
0 引 言
近年来,采用磁场定向控制技术(FOC)的直流变频压缩机驱动技术在变频冰箱、变频空调系统中得到了广泛的应用。为了实现压缩机电机的高性能控制,精确地采样定子相电流是至关重要的。目前的采样方法包括双电阻采样方法和单电阻采样方法。双电阻采样方式实际上是在三相逆变器下桥臂串联3 个采样电阻进行电流采样。但是该方法不适合下桥臂不开放的智能功率模块(IPM)的应用场合,而且三电阻需要较大的PCB 布板面积并造成一定的电路损耗[1]。而单电阻采样法则很好地解决了这些问题。因此单电阻采样法被广泛研究与应用。
压缩机电动机运行过程中,系统可以对直流母线电流进行检测,重构三相电流,来实现电流闭环控制。Green[2]首次提出利用母线电流来重构电动机相电流波形。Lee 等[3]对单电阻电流重构技术进行了一系列的研究,并提出了PWM 波移相的方法和电流观测器的方法。储剑波等人[4]提出了一种易于DSP 实现的空间矢量移相方法。
本研究拟采用电流观测器的方法,通过对母线电流的采样值和相应的开关量进行分析计算,建立预测电流观测器,从而完成对三相相电流的重构,实现电机电流闭环控制。
1 永磁同步电机数学模型
永磁同步电机在三相静止坐标系下定子绕组电压平衡方程如下[5]:
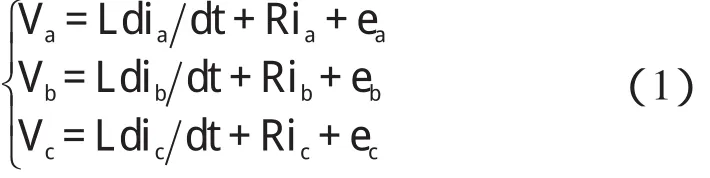
式中:Va,Vb,Vc—三相坐标轴定子电压;R—三相绕阻;ia,ib,ic—三相相电流;L—三相绕组的电感;ea,eb,ec—电压反电动势。
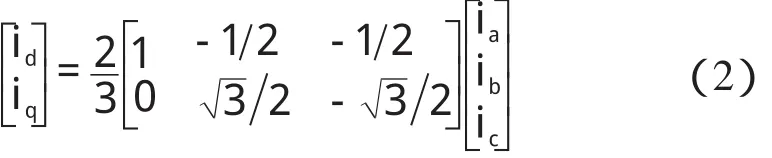
通过Park 变换可以将三相电流变换到同步旋转d-q 坐标系上。三相电流不一定是对称的或平衡的,但是它们瞬时的矢量综合一定等于零,即ia+ib+ic=0,那么它们在静止坐标系(θ=0)下,可以由下面的公式表示:
2 单电阻采样电流原理及其难点分析
本研究的控制对象为变频压缩机,实质是对永磁同步电机的控制,其控制方法为空间矢量电压法(SVPWM),其主要思想为:以三相对称正弦波电压供电式交流电动机的定子理想磁链圆为参考标准,以三相逆变器不同开关模式作适当的切换,从而形成PWM波,以所形成的实际磁链矢量来追踪其准确磁链圆[6]。
根据每相下桥臂T2、T4、T6的开关状态,可以产生6 组基本的非零空间矢量,即V1(001),V2(010),V3(011),V4(100),V5(101),V6(110)和2 组零矢量V0(000),V7(111)[7]。而 T1、T3、T5的开关状态与 T2、T4、T6互补。单电阻相电流检测电路如图1 所示。在不同的非零空间矢量作用下逆变器的开关状态不同,直流母线电流对应的相电流也不同。研究者在使用非零的基本矢量时,通过采样母线电流Idc就可以根据公式ia+ib+ic=0,通过逻辑分析分解出各相电流的值,从而完成对三相电流的重构。母线电流与三相电流之间的关系如表1 所示。
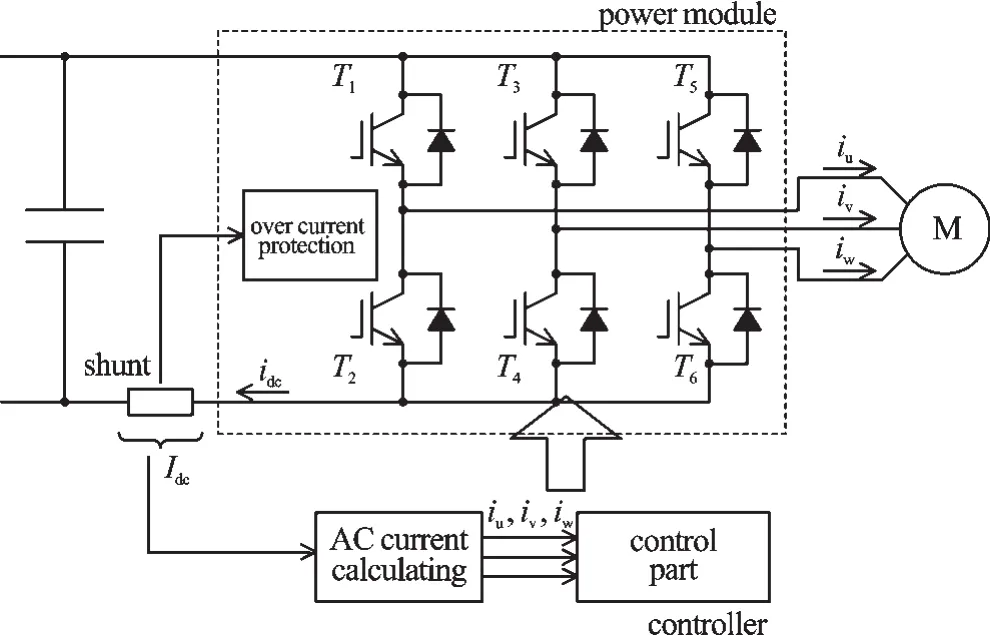
图1 电流检测原理图
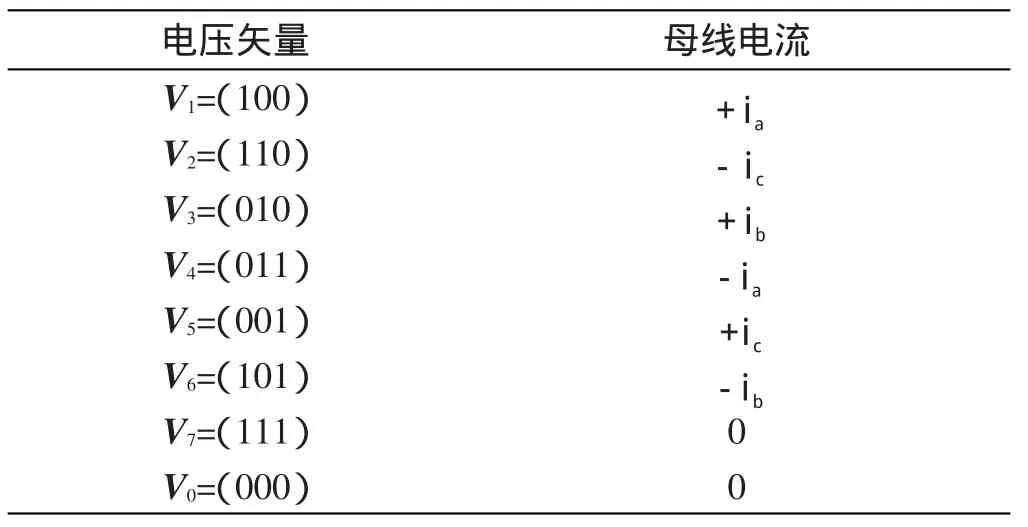
表1 母线电流与电机三相电流的关系
以第1 扇区为例,其SVPWM 波形示意图如图2 所示。参考电压矢量Vref由V1(100),V2(110),V7(111)和零矢量合成,采用中心对称模式,一个PWM 周期被分为7 个时间段。在V7(111)和V0(000)作用的3 个时间段内,电阻中的电流为0。在其余的时间段,由于PWM 为中心对称模式,电阻中的电流是对称的。当V1(100)作用时,通过检测母线电流Idc,可以得到 +ia=Idc,此时母线上的电流等于A 相电流。同理,当V2(110)作用时,可以得到C 相的电流ic,那么由ia+ib+ic=0 计算求得ib=-ia-ic。
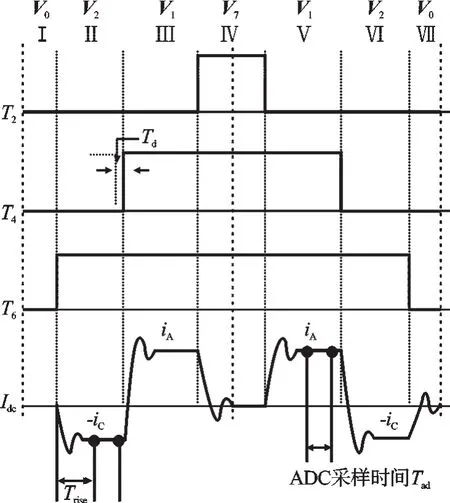
图2 第1 扇区SVPWM 波形示意图
上述方法存在的局限性在于必须有一个最小时间量Tmin来确保电阻上的电流被采样到,即:

式中:Td—死区时间,避免上、下桥臂同时导通;TRise—确保采样前母线电流完全建立需要的稳定时间,这段时间内还包括了IGBT 的和驱动电路的延迟时间;Tad—A/D 采样和保持时间。
如果减少了Td、TRise和T ad,那么PWM 信号的持续时间将会减少。也就是说参考电压矢量处于低调制区域或者非可观测区域时,是不可能得到最短时间Tmin的。相电流不可测区域电压矢量图如图3 所示。
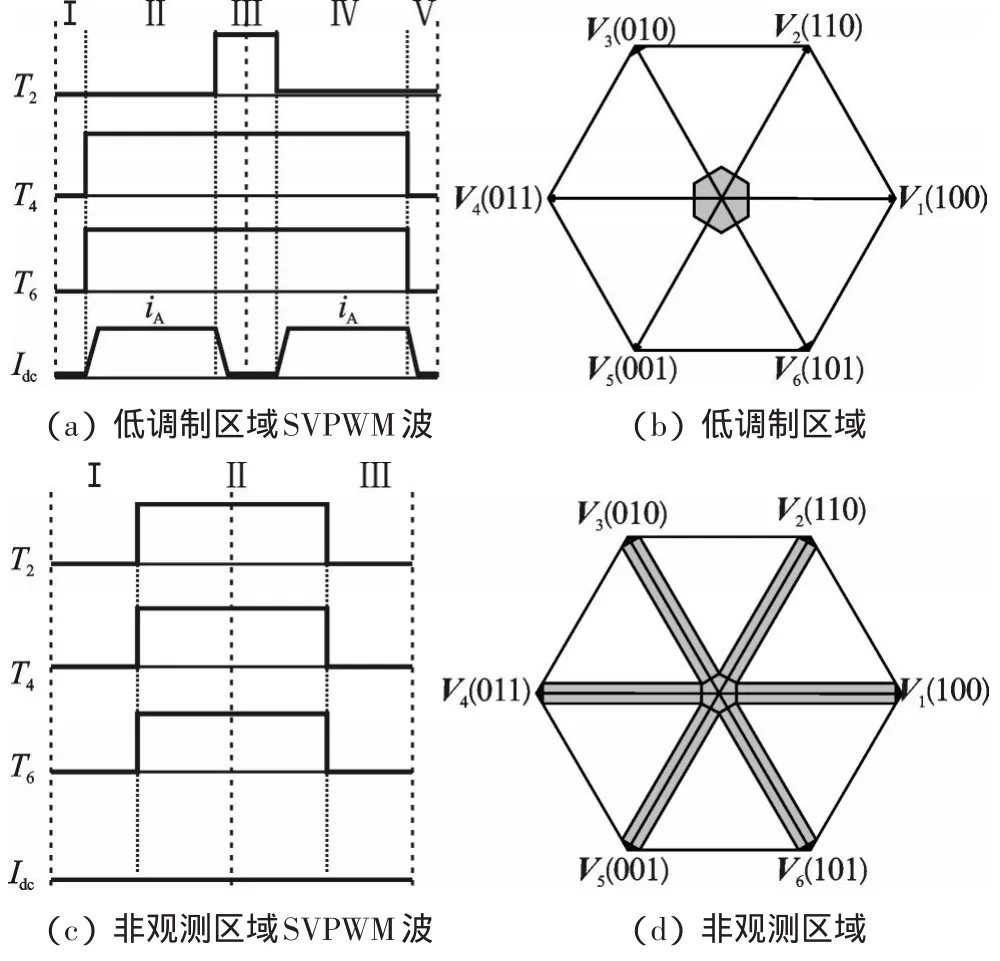
图3 相电流不可测区域电压矢量图
参考电压矢量处于低调制区域的情况如图3(a)所示,3 个桥臂的占空比几乎相同。在这种情况下,7个子时间段变成3 个,在3 个时间段中,流过采样电阻的电流为0。也就意味着当电压矢量进入如图3(b)所示的阴影区域时,无法采到相电流。
参考电压矢量处于在中、高调制区的情况如图3(c)所示。在相邻的两个空间矢量扇区的边界区域,有两个桥臂的占空比几乎相同。在这种情况下,7 个子时间段变成了5 个,两个相电流只能准确获得一相的电流,不能实现三相电流的重构。非观测区域如图3(d)所示,在6 个扇区中,阴影部分表示只有一相电流可以被测量出,这个区域为非观测区域。以第一扇区为例,当参考电压矢量进入阴影区域,即非观测区域区域时,电压矢量V1(100)作用的时间足够长,可以通过母线电流重构获得A 相的电流 +ia。但是V2(110)作用时间非常短,不能通过采样电流重构获得 -ic。
3 通过预测状态观测器计算Idq
为了解决上述问题,文献[7]提出了附加矢量的方法,通过调整一个开关周期内的占空比,获得一个具有不同相位和幅值的附加矢量来减少零向量的作用时间,从而使得能够重构相电流的母线电流可以被采样到。但是这种方法使得PWM 产生过程中切换模式变为不再对称,增加了开关损耗,另外,在利用DSP处理时不易实现。文献[3]采用了PWM 波移相的方法,将一个PWM 周期内占空比最大和最小的对应的PWM 波进行前后平移,来获得足够的采样时间。但是该方法的局限在于:在高调制区域,非观测区域内零矢量的作用时间非常小,通过PWM 移相后只能准确获得其中一相的电流值。
本研究采用电流观测器的方法,在中、高调制区域通过一相的电流值,可以很好地获得相对准确的三相电流值[9-10]。电流观测器的输入量为采样电流与预测电流的误差和相应的开关量等。输出量则为电机定子坐标系下的电流id,iq。对式(1)进行整理可得:

对式(4)进行离散化处理可以得到:

其中:

式中:Ts—采样周期,I2—二阶单位矩阵。
通过式(5)可以构建一个简单的开环状态观测器,利用实际电流矢量预测下一个采样时刻。但是,这样做存在着预测误差,只能初步得到电流的估计值或整流器的参数值。因此,研究者可以定义一个附加项z,将其与估计值和误差相结合,以得到一个闭环的电流观测器:

其中:

式中:T—采样时间。
且:
式中:is(n)—采样到的电流矢量,i^(n)—预测的电流矢量。
则采样电流与预测电流的误差ε=i^(n)-is(n),对于使用单传感器控制器时,直接获得is(n) 是不可能的,只能通过采样母线电流去计算得出。
因此当只有A 相电流被精确检测到时,补偿差值

则由公式(5~7),可以得到:

则:

则:

本研究基于电机数学模型的电流观测器的估算电流和实际电流误差,由公式(8~10)建立了电流观测器,得到了非观测区域的电流值,结合上面得出的可观测区域的电流值,完成了对三相电流的重构,为转子位置的检测与闭环控制提供了参考依据。
4 实验结果分析
该实验基于STM32F103RB 控制芯片的变频器的硬件平台。STM32F103RB 的A/D 转换精度为12 位,最快转换速度为1 MHz。A/D 转换的值通过DMA 中断进行平均值计算,能够保证采样数据的稳定性。本研究采用STM32F103RB 内的高级定时器TIM1 的4 个通道进行SVPWM 的产生和ADC 的触发采样。相电流的ADC 转换由PWM4 的上升沿触发,可以保证A/D 电流采样和SVPWM 输出的同步性。
该实验选取压缩机参数最大电流为3 A,极对数为2。逆变器采用SANKEN 公司生产的智能功率模块SLA6805,该模块集成了6 个IGBT 及其前置驱动、过流保护、死区控制等功能模块。
电流采样电路如图4 所示,包括一个放大电路、一个光耦隔离电路和一个信号调理电路。在电流采样过程中,STM32 内部设置A/D 采样时间T ad 为2.55μs,TRise约为1μs,死区时间Td为1.5μs。则为了能够正确的重构相电流信号,最小检测时间Tmin设置为10μs,同时这个时间可以根据实际情况进行恰当的增加和减少。
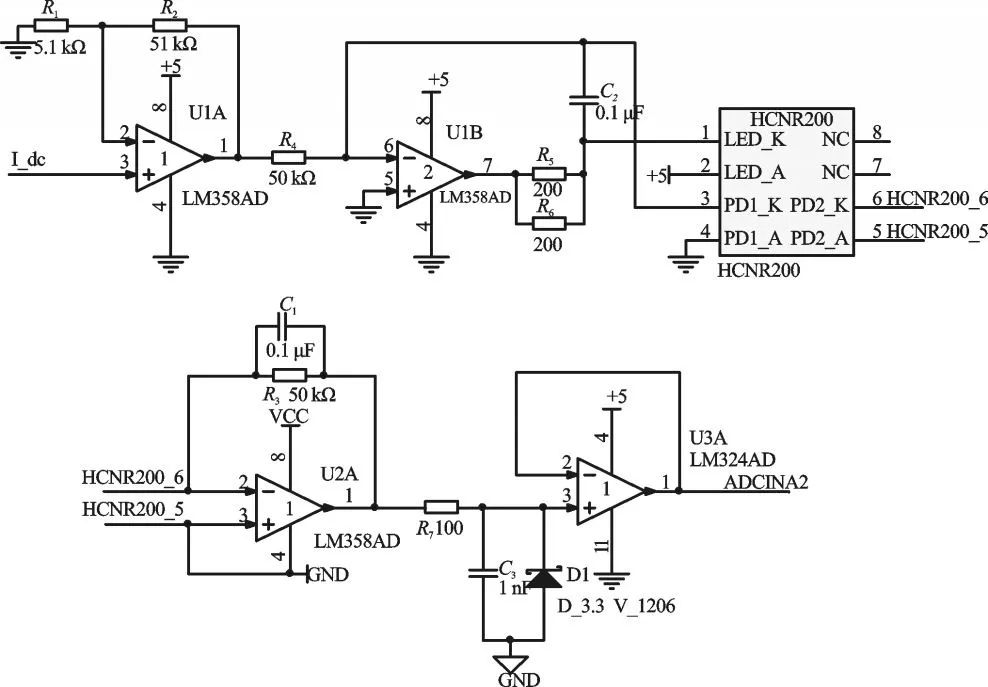
图4 单电阻电流采样电路
整个系统的参数如表2 所示。
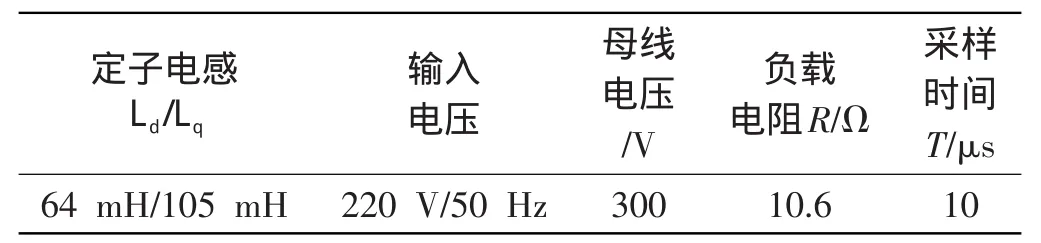
表2 系统参数
采样电阻上的采样信号经放大调理得到的波形如图5 所示。通过对母线电流采样后计算重构得到的A 相的相电流波形如图6(a)所示。通过示波器实测得到的电动机A 相电流波形如图6(b)所示。由图6可以知道,重构的相电流与实际电机的相电流较吻合,表明相电流重构技术有效。
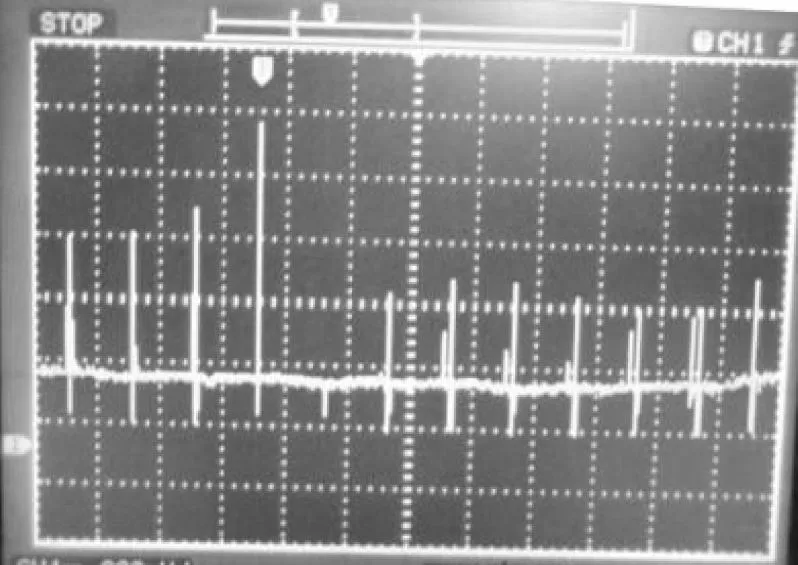
图5 单电阻上的采样信号
5 结束语

图6 A 相相电流波形
对于无位置传感器的永磁同步压缩机,单电阻检测母线电流并重构三相电流具有成本低、硬件简单、精度高、易实现等优点。本研究对单电阻电流采样重构三相电流技术进行了原理上的分析,并针对中、高频调制区域的非观测区域采用了预测状态观测器的数学方法。实验结果证实,该方法能够用于正确重构相电流,对于冰箱领域压缩机的控制具有很高的实际应用意义。
(References):
[1]陈小波,黄文新,胡育文,等.变频器单电阻电流采样及相电流[J].电气传动,2010,40(8):3-6
[2]GREEN T C,WILLIAMS B W.Derivation of motor line-current wave forms from the dc-link current of an in⁃verter[J].Proc.Inst.Elect.Eng,1989,136(4):196-203.
[3]LEEW C,LEE T K,HYUN D S.Comparison of single-sen⁃sor current control in the DC link for three-phase volt⁃age-source PWM converters[J].IEEE Transactions on Industrial Electronics,2001,48(3):491-505.
[4]储剑波,胡育文.一种变频器相电流采样重构技术[J].电工技术学报,2010,25(1):111-117.
[5]HARTANI K,MILOUD Y.Control strategy for three phase voltage source PWM rectifier based on the space vector modulation[J].Advances in Electrical and Computer Engineering,2010,10(3):61-65.
[6]高 强,刘桂花.一种永磁同步压缩机三相电流重构方法[J],电机与控制学报,2009,13(2):267-271.
[7]陈小波,胡育文.基于单电阻电流采样的矢量控制算法研究[J].电气传动,2011,41(5):15-19
[8]SARITHAAND B,JANAKIRAMAN P A.Sinusoidal three-phase current reconstruction and control using a DC-link current sensor and acurve-fitting observer[J].IEEE Transactions on Industrial Electronics,2007,54(5):2657-2664.
[9]LI Ying,ERTUGRUL N.An Observer-based Three-Phase CurrentReconstruction using DCLink Measurementin PMAC Motors[C]//IEEE 5th InternationalPower Electronicsand Mo⁃tion ControlConference.Shanghai:IEEEPress,2006:1-5.
[10]CHI S,WANG X.A Current reconstruction Scheme for Low-Cost PMSM Drives using Shunt Resistorsr[C]//APEC 2007.Benton Harbor:[s.n.],2007:1701-1706.
猜你喜欢
新型工业化(2021年8期)2021-10-23
中学生数理化·高一版(2021年11期)2021-09-05
电子与封装(2021年7期)2021-07-29
现代防御技术(2016年1期)2016-06-01
新高考·高一物理(2016年1期)2016-03-05
铁道科学与工程学报(2015年5期)2015-12-24
深空探测学报(2015年3期)2015-12-07
电测与仪表(2015年19期)2015-04-09
电测与仪表(2014年21期)2014-04-04
电测与仪表(2014年11期)2014-04-04