逆变电源在微网中的控制策略仿真研究*
2013-09-13 06:07潘再平
机电工程 2013年4期
张 淳,潘再平
(浙江大学 电气工程学院,浙江 杭州 310027)
0 引 言
微网将一定区域内的分布式电源组织起来,形成了一个微型电网为本地区的负载供电或与大电网连接。而在一些偏远地区或岛屿上,则更希望能充分利用各个分布式电源,实现能量的自给自足。在独立运行期间,微网中风能、光伏等所占比例较大时,因其自身的不稳定性,会出现能量供需不平衡的情况,引起微网电压的变化。因此,系统中需要有功率可调的电源,随时根据电网运行情况增大或减小输出功率,维持系统能量平衡。
微网的典型工作方式分并网运行、孤岛运行以及二者切换几个状态,构成微网的分布式电源多通过电力电子器件与电网连接。逆变器的控制方法主要包括恒压恒频(V/f)、恒功率(PQ)和下垂(droop)控制。3种控制方法各有特点:V/f 控制能直接控制输出电压和频率,适用于主从策略中主要发电单元的控制;PQ 控制能够直接控制有功功率和无功功率,使其按照指定的参考值向微网传递能量,但需电网自身能维持电压,适合于功率比例较小的分布式电源应用;而droop控制利用感性线路阻抗下并联电源输出有功功率与频率、无功功率与电压幅值近似呈下垂曲线的特性,根据输出功率改变电压和频率或者反向应用。其中,droop 控制是借鉴了以SPWM 逆变器为接口的不间断电源(UPS)的均流控制方法,能够在各发电单元无相互通信前提下,实现并联运行,合理分配负载功率,保持系统稳定。
针对微网控制策略已有多篇文章论述。文献[1-3]分别从小信号和向量等角度建立数学模型,为控制参数优化等微网研究提供了依据。文献[4]针对以并网运行为常态的微网在孤岛运行强制发生时,系统如何自动维持稳定以及其中储能元件的作用加以分析;文献[5]则针对传统V/f 下垂控制的不足,基于V/δ加以改进修正,在孤岛运行中有效跟踪功率变化动态特性,优化微网内部负荷分配,但仅限于对有功功率的研究;文献[6]介绍了微网工作模式切换中电源网侧变流器的控制方式,即在PQ 和V/f 两种方式中选择切换,但对象只针对单一电源;文献[7]则针对低压电网中因线路阻抗近似呈阻性而导致电源输出有功无功不解耦的情况,采取了适当变换进行解耦,并完成了基于小信号的稳定性分析。
本研究则基于线路阻抗等效为感性条件下,针对微网处于孤岛运行中电压频率的维持,以及各电源输出的有功和无功分配,进行仿真分析。
1 微网结构与控制原理
1.1 微网结构
微网结构如图1 所示[8],由直流源代替分布式发电电源中整流后的输出,经三相逆变器和LC 滤波后逆变成三相交流电与交流母线相连,连结成微网独立为负载供电。此时,微网与大电网间的开关处于关断状态[9]。
1.2 下垂控制原理与公式
对于并联电源,其输出功率存在以下关系式[10]:
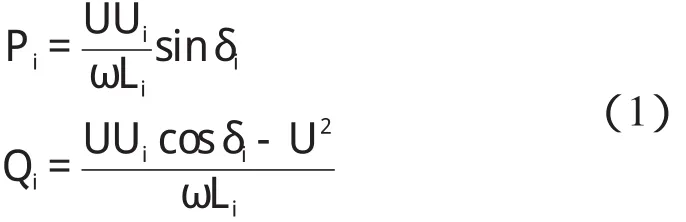
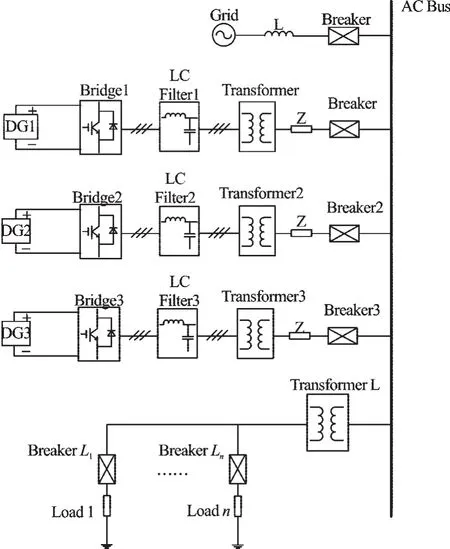
图1 微网结构
式中:i—电源编号,U—微网电压,Ui—电源端口输出电压,δi—电源端口电压Ui与微网电压U 的相位差,Li—输出阻抗。
因为逆变器的输出阻抗大多为高度感性,笔者将其等效为感抗。一般相位差δ都很小,可有sinδ≈ δ,而相位差 δ与频率 f 成正比,故存在P 与 f 之间的下垂特性关系,同理Q/U 下垂特性也存在。本研究考虑微网中分布式电源与内部负荷的动态变化,还增加了下垂控制修正项,用以提高系统稳定性。下垂控制公式为:

式中:a,b—频率和电压幅值的下垂系数,其值为负;a′,b′—修正项系数;f0,U0—额定条件下的频率与电压幅值;P0,Q0—额定条件下电源的输出有功功率和无功功率,大小由电源容量不同而异,其非零值的设置保证即使在微网内功率平衡或者与大电网并网状态下电源仍保持一定功率输送;P,Q—由当前输出电压、电流经计算而得到的有功功率和无功功率;f*,U*—当前状态下,频率和电压幅值的参考值。
可调电源功率参考值的计算由几部分构成:频率波动反映的功率补偿值,输出端电压跌落反映的功率补偿值和额定功率。系统内其他电源功率偏差造成了频率波动,可反向利用下垂特性,估算出一个功率补偿值;而同时由公式(1)可知,电源输出功率不仅与频率近似成正比,且与输出端电压Ui也呈正相关,电源的输出端电压的差值也能够一定程度上反映出当前微网中功率的缺失状况,用于可调电源有功功率参考值的计算中。无功功率则可由下垂特性曲线,根据端电压差值获得。故用于估算可调电源功率参考值的公式为:

式中:m2—电压与有功的比例系数;m1,n—下垂系数的倒数,但此处的下垂系数与其他电源无关,而是针对整个微网内部中有功与频率、无功与电压幅值间的对应关系确定的。
一般来说,每单位赫兹频率的偏差所反映的整个微网内有功功率的偏差应大于单个电源,电压幅值与无功功率的关系情况相同,故具体数值应另行设置。
2 控制策略与方案
2.1 综合控制方案
在微网孤岛运行中,下垂控制的应用实现了各并联电源的均流,避免了环流,同时共同参与了微网电压的调节。但对于一个实际的微网,一般会令风电、光伏等处于最大功率状态工作,此时电源的输出有功功率受电源侧(如风力发电机机侧变流器、光伏DC/DC 电路)的控制结果直接影响。由于自然环境中风速、光照强度的不确定性,加之负载的变化,微网系统中需要由可调电源随时根据电压频率情况调节输出功率。文献[4]与文献[9]的方法是通过中央控制器输出可调电源功率的参考值,令可调电源以恒功率方式工作,该方法对通讯要求较高,不适合基层分布式电源的自动化控制。如果不依赖中央控制器,而是在可调电源控制器处就根据输出端电压的情况将下垂特性曲线反向应用,自动修正输出功率参考值,则理论上可以弥补微网能量的不平衡,减小电压和频率的浮动。
故本研究提出一个微网综合控制方案,其系统结构框图如图1 所示,令一部分电源(DG1、DG2)以最大功率输出,逆变器采用下垂控制,有功功率参考值就采用当前电源的最大功率,无功功率参考值根据各电源容量设定;而可调电源(DG3)则通过检测电网电压的频率和幅值,先根据微网整体的下垂曲线估计得到功率参考值,再依据电源自身容量所具有的下垂特性调整输出电压幅值和频率。该方案使逆变电源全部参与了微网系统电压的调节,适用于多个逆变电源并联但缺少大比例稳定电源的情况。
2.2 逆变器控制策略
下垂控制环节中,系统检测的电压、电流值滤波后,可计算出电源实际输出的有功功率P,经过低通滤波器后,通过下垂系数调节可得到频率参考值 f*;无功功率Q 通过下垂公式调节后可得到电压幅值参考值。实质上,下垂控制也是一种恒压、恒频控制,只不过其电压、频率的参考值不是固定的指令值,而是跟随功率变化而定的。
频率参考值 f*经过积分后得到相位角θ,以此定向;本研究将电压参考值U*设定为d 轴电压参考值,而将q 轴电压参考值设为0。电压参考值经过电压电流双闭环控制得到PWM 触发脉冲。电压电流环采用“电压外环电容电流内环”的方式,因为相较于电压外环电感电流内环,前者的输出特性更硬,更适合作为恒压源逆变器来支撑微网电压。
可调电源功率补偿控制框图如图2 所示,系统检测到的三相电压Uabc,经过锁相环可计算出当前电源输出端电压的幅值和频率,再利用公式(3)将两部分补偿功率值与电源额定功率相叠加,可估算出此时可调电源应输出的功率参考值。再通过针对可调电源自身设置的下垂系数作为电压源输出,与微网内其他电源共同维持电网电压和频率。其中,频率和端电压分别与有功功率的比例系数根据未进行补偿前的实验结果获得的波动状况计算得到。
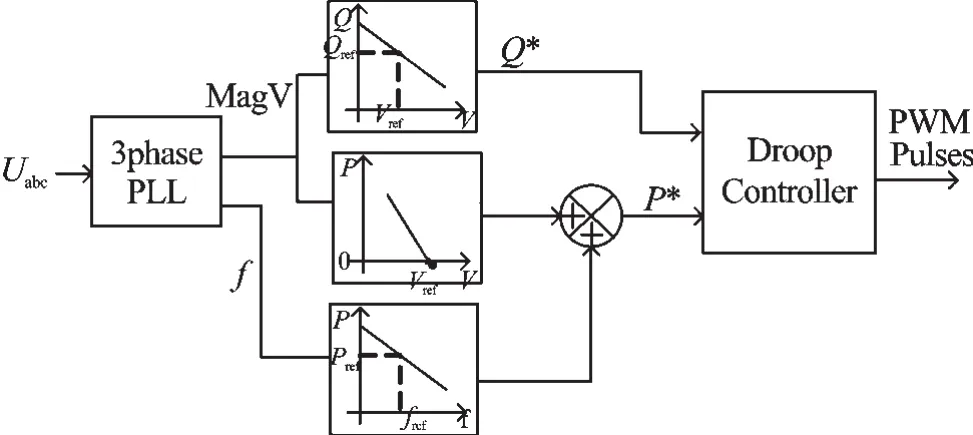
图2 可调电源功率补偿控制框图
3 仿真实验
仿真一系统结构如图2 所示,其中,DG1 和DG2 均以下垂控制方式工作,DG3 作为可调电源同时加入参考功率补偿环节。仿真二系统与之作为对比,结构与图1 相同,只是其中DG3 也以下垂控制方式工作,缺少参考功率补偿的环节。两种比较方法的下垂参数除功率补偿环节之外均一致,系数设置如表1 所示。
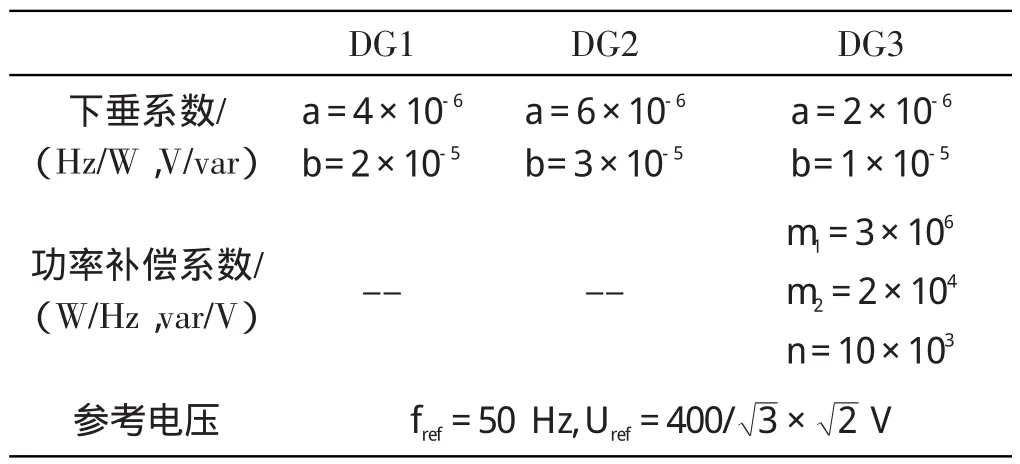
表1 控制参数设置
仿真初始,设定各电源参考功率分别为:Pref1=200 kW,Qref1=100 kvar;Pref2=300 kW,Qref2=100 kvar;Pref3=400 kW,Qref3=100 kvar。系统负载功率初始值为Pload=900 kW,Qload=300 kvar。在平稳运行后的第4 s,DG1 有功功率参考值减小为100 kW;第7 s,负载功率增加200 kW,100 kvar。
仿真一的结果如图3 所示,在DG1 输出有功减少的情况下,DG3 输出有功随之增加;在负载增加时,DG3 增大有功输出。电压幅值与频率变化情况如图4所示:微网负载处电压幅值先不变,然后在第7 s 跌落近5 V;频率则先降低0.02 Hz,再降低0.03 Hz。而仿真二的结果如图5 所示,电压一次变化1 V、11 V,频率依次减小0.035 Hz、0.11 Hz。对比图4、图5 可见,仿真一的电压幅值和频率波动更小,由此可以证明DG3 的功率补偿环节在其中起到了一定的作用。
4 结束语
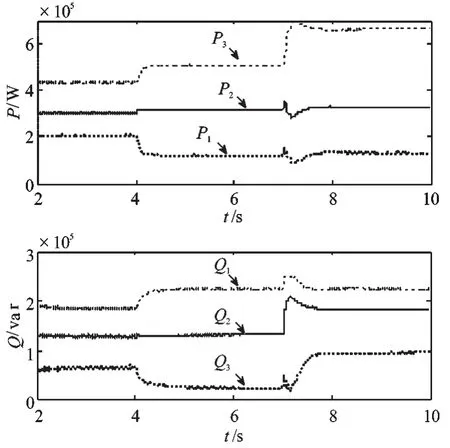
图3 各电源输出有功功率与无功功率(仿真一)
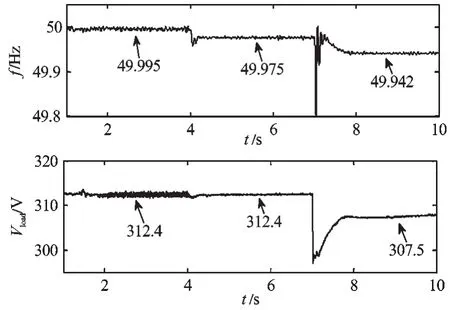
图4 电压幅值与频率(仿真一)
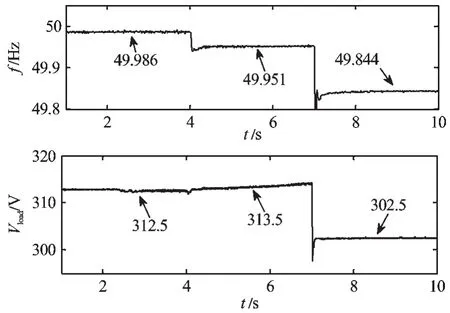
图5 电压幅值与频率(仿真二)
本研究在Matlab/Simulink 平台上仿真验证了基于下垂特性的功率补偿方法,即在下垂控制的基础上,反向利用下垂特性估计出可调电源应发出功率的参考值,再与系统中其他电源一起通过下垂控制共同维持微网电压和频率。该过程在发电单元控制器中完成,减少了与中央控制层以及电源之间的通讯强度,实现了“即插即用”的对等控制。仿真结果表明,该方法能够在一定程度上减小因负载和电源波动造成的电压跌落与频率波动,具有较好的可行性。
(References):
[1]曾 正,赵荣祥,杨 欢.含逆变器的微电网动态相量模型[J].中国电机工程学报,2012,32(10):65-71.
[2]张建华,苏 玲,刘若溪,等.逆变型分布式电源微网并网小信号稳定性分析[J].电力系统自动化,2011,35(6):76-80.
[3]张建华,苏 玲,刘若溪,等.逆变型分布式电源微网小信号稳定性动态建模分析[J].电力系统自动化,2010,34(22):97-102.
[4]PECAS LOPES JA,MOREIRA C L,MADUREIRA A G.Defining control strategies formicrogrids islanded operation[J].IEEE Transactions on Power System s,2006,21(2):916-924.
[5]李福东,吴 敏.微网孤岛模式下负荷分配的改进控制策略[J].中国电机工程学报,2011,31(13):18-25.
[6]CONTIS,GRECO A M,MESSINA N,Vagliasindi U.Gener⁃ators control systems in intentionally islanded MV mi⁃crogrids[C]//Proceedings of the International Symposiumon Power Electronics,Electrical Drives,Automation and Mo⁃tion.Italy:Ischia,2008,:399-405.
[7]LI Y,LI Y W.Decoupled Power Control for an Inverter Based Low Voltage Microgrid in Autonomous Operation[C]//Proceedings of IEEE 6th International Power Electron⁃ics and Motion Control Conference.2009.
[8]杨艳天,张有兵,翁国庆.微网并网控制策略的研究[J].机电工程,2010,27(2):14-20.
[9]刘 霞,江全元.基于飞轮储能和蓄电池的微电网控制策略[J].机电工程,2012,29(5):553-558.
[10]董 亮,张 尧,马 皓,等.微电网无互联线逆变器并联系统新型相位调节法[J].电力系统自动化,2012,36(2):52-57.
猜你喜欢
新疆大学学报(自然科学版)(中英文)(2020年2期)2020-07-25
医学新知(2019年4期)2020-01-02
水电站机电技术(2017年9期)2017-09-26
微特电机(2016年3期)2016-11-29
通信电源技术(2016年6期)2016-04-20
电测与仪表(2015年16期)2015-04-12
西南国防医药(2015年7期)2015-02-28
现代检验医学杂志(2015年1期)2015-02-06
江苏通信(2014年4期)2014-04-14
电测与仪表(2014年12期)2014-04-04