发射阶段着陆器及关键机构动力学分析
2013-09-07 08:52:44陈金宝张则梅
中国机械工程 2013年19期
陈金宝 聂 宏 张则梅
1.南京航空航天大学,南京,210016 2.上海卫星工程研究所,上海,200011
0 引言
着陆器主结构和软着陆机构设计是月球探测器软着陆成功的关键,结构动力学分析是着陆器主结构和软着陆机构设计的重要手段和工具。目前,针对国内外着陆器相关性能的研究已广泛开展,其研究成果主要集中在着陆器新概念研究[1-4]、缓冲材 料 缓 冲 性 能 研 究[5-10]、着 陆 冲 击 过程动力学分析[11-14]、稳定性分析[15-19]及其他相关领域[20],上述研究成果主要围绕着陆器在月面着陆过程进行。文献[11]虽针对着陆器发射状态,即着陆器被放置在运载火箭整流罩内(此时软着陆机构处于收拢位置),研究了单着陆腿收拢状态动力学特性,而综合考虑着陆器整机及月球车、太阳电池帆板等关键机构并研究其在收拢状态下的运动特性,以及运载火箭产生的激励环境对着陆器整机及关键机构相关性能的影响的研究未见报道。
1 结构模态分析理论
模态是结构系统的固有属性,主要取决于系统结构的质量分布和刚度。任何一个系统的动力学特性可以表示为[21-23]

式中,M为系统的质量矩阵;C为系统的阻尼矩阵;K为系统的刚度矩阵;u(t)为位移响应矢量;F(t)为系统所受到的与时间相关的外力矢量函数;N为系统受到的与u(t)和(t)相关的非线性外力项矢量;Q 为边界约束力矢量。
系统结构的模态分析是在假设系统整体处于无外界激励的条件下进行的,故取F(t)、N、Q均为零矩阵。通常结构阻尼较小,对固有频率和振型的影响甚微,故忽略不计。因此系统结构的无阻尼自由振动方程为

若假设该系统做简谐振动,则有

式中,U为系统节点的振幅,表示结构振动的形态;ω为结构的固有圆频率;φ为初相角。
对式(3)中的u(t)求关于时间t的二阶导数,可得

将式(3)和式(4)代入式(2),整理可得

式(5)为典型的广义特征值问题。由相关矩阵知识可知,若系统发生自由振动,则此式一定有非零解,故矩阵KU-ω2MU为奇异矩阵,即

式(6)为多自由度体系的自由振动频率方程,是ω2的高次代数方程,其次数为该系统结构的自由度数n。可知,式(6)有n个根,记为,,…,。相应地,式(5)有一组线性无关解U1,U2,…,Un。在振动分析中,ωi和Ui(i=1,2,…,n)分别叫做结构的第i阶固有圆频率(频率为和与之相对应的振型。
2 着陆器及关键机构有限元模型
本文以课题组所设计的着陆器样机模型为研究对象(图1),该着陆器的主结构由探测机体、软着陆缓冲腿、铝蜂窝缓冲材料及足垫等组成,相关质量分布如表1所示。着陆器机体结构主要由顶板、底板、分割板、侧板以及主制动火箭喷口罩等构成。为深入研究发射阶段月球着陆器的整体安全性能,在该着陆器样机模型基础上增加了太阳电池帆板机构和月球车携带及降落机构,相关质量分布如表2所示。
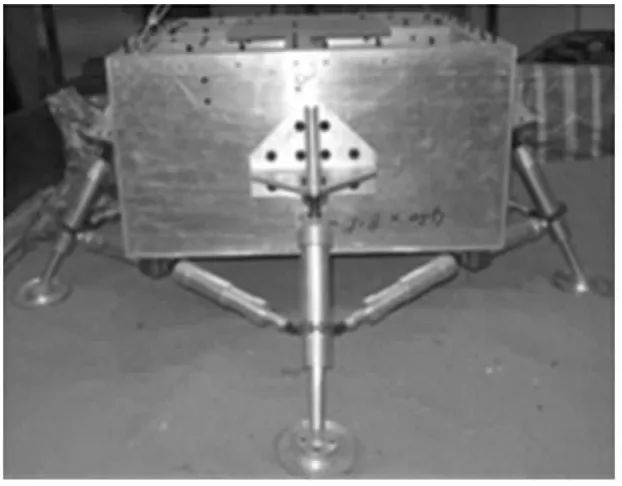
图1 课题组设计的着陆器样机
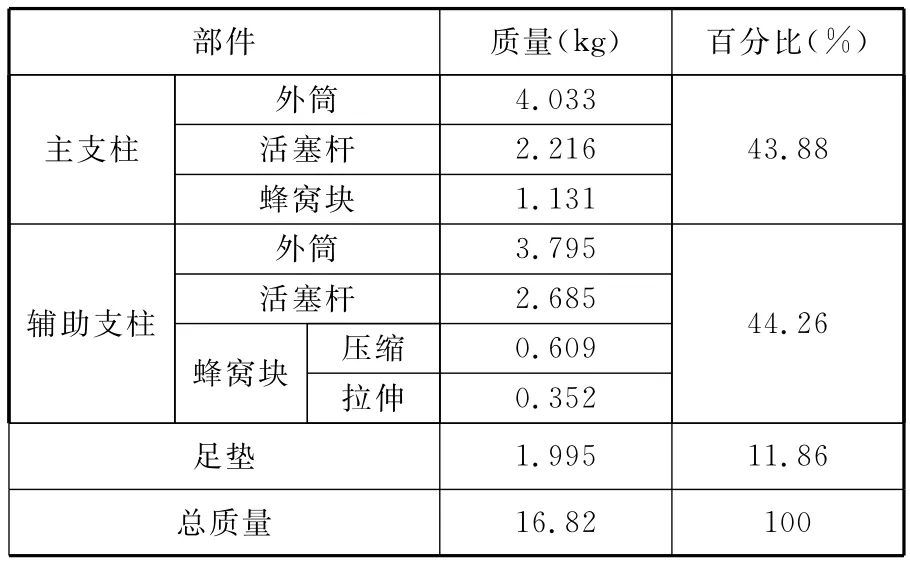
表1 单条着陆腿中不同部件的质量分布
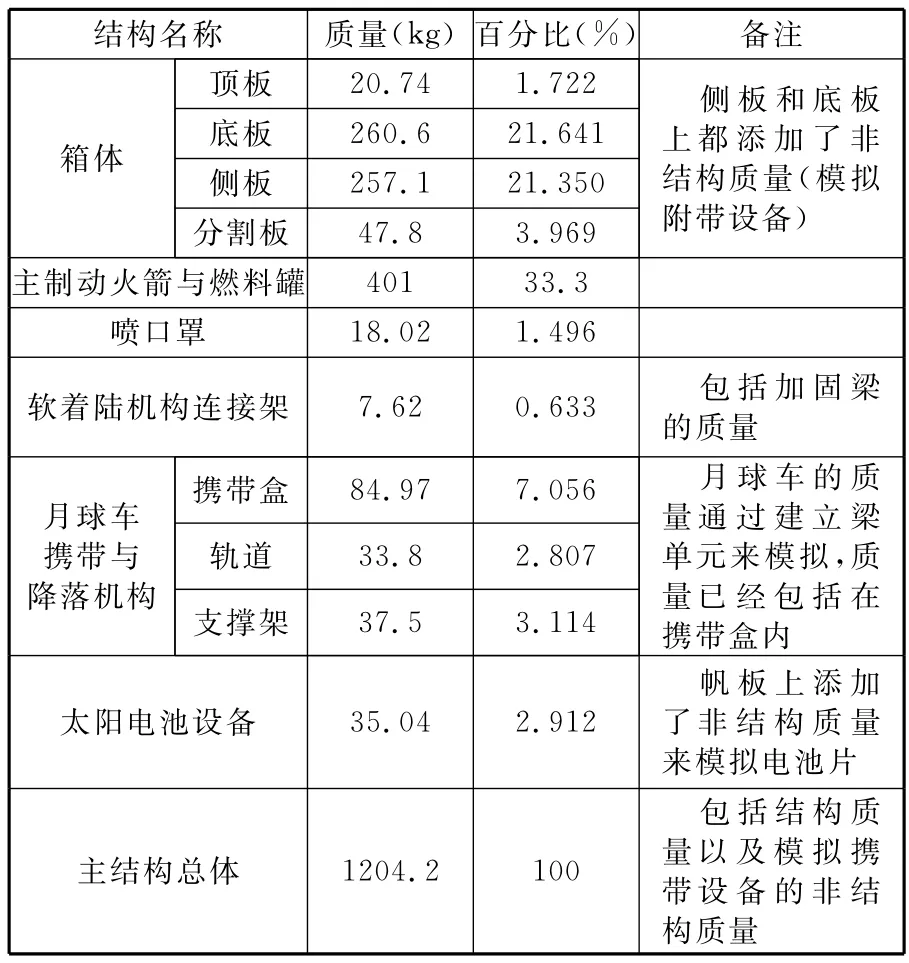
表2 月球着陆器主结构中各部分的质量分布
上述着陆器的主结构中,着陆器机体的顶板、底板、分割板、底板、连接架的横板以及月球车的携带系统均参考实际着陆器为铝蜂窝夹层板结构。为便于建立着陆器整机关键机构及相关有效载荷有限元模型,将图1所示的着陆器机体等效为八面体结构,所建立的着陆器及关键机构有限元模型如图2~图4所示。
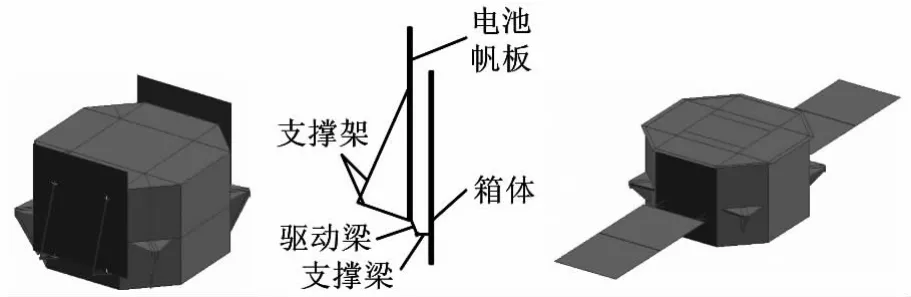
图2 着陆器机体及太阳电池帆板结构图
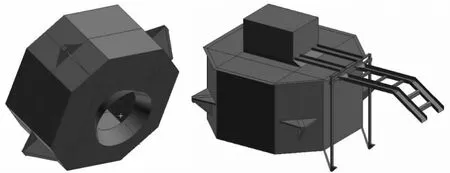
图3 着陆器月球车升降机构及主制动火箭喷口罩图
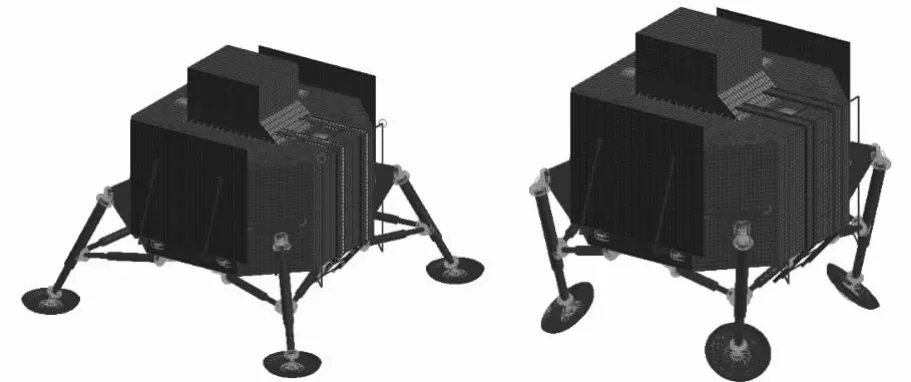
图4 处于展开及收拢状态月球着陆器有限元模型图
3 发射阶段着陆器收拢状态下的模态分析
目前,在国内外已广泛开展针对着陆器在月球表面着陆冲击过程相关动力学及稳定性分析,因此,本文在文献[9]研究的基础上综合月球车及其携带机构、太阳电池帆板、主制动火箭等因素对着陆器整体发射阶段的固有频率及振型进行分析。结合上述模型,在MSC.Patran中对软着陆机构处于收拢状态下的着陆器有限元模型施加边界条件,并在MSC.Nastran中进行模态分析,表3给出了着陆器收拢状态下前10阶固有频率。
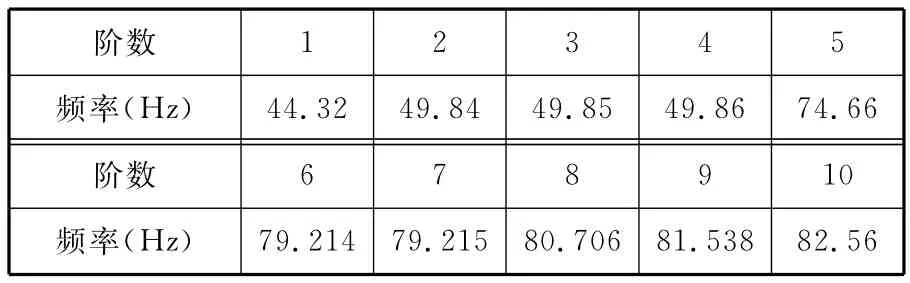
表3 着陆器收拢状态前10阶固有频率
其中,第1、5、8阶模态为着陆器的整体模态,分别对应着陆器及关键机构的一阶横向扭转变形(X 轴)、一阶横向扭转变形(Z轴)和一阶轴向振动(Y轴),相关振型如图5所示。

图5 着陆器收拢状态整体模态振型图
除上述介绍的着陆器3阶整体模态外,其他7阶模态为着陆器局部模态。相关主要振型图如图6所示,显然,第2阶振型主要由着陆腿主支柱的弯曲振动引起;第6阶振型主要由太阳电池帆板的扭转振动引起;第9阶振型主要由月球车携带及降落系统中垂直轨道的弯曲振动引起。
4 发射阶段着陆器整机频响分析
在发射阶段着陆器被放置在运载火箭整流罩内,其4条着陆腿处于收拢状态。发射过程中激励主要来源于火箭发动机不稳定燃烧产生的推力脉动变化,该频率变化范围为4~100Hz,如表4所示[11],其中g为重力加速度。
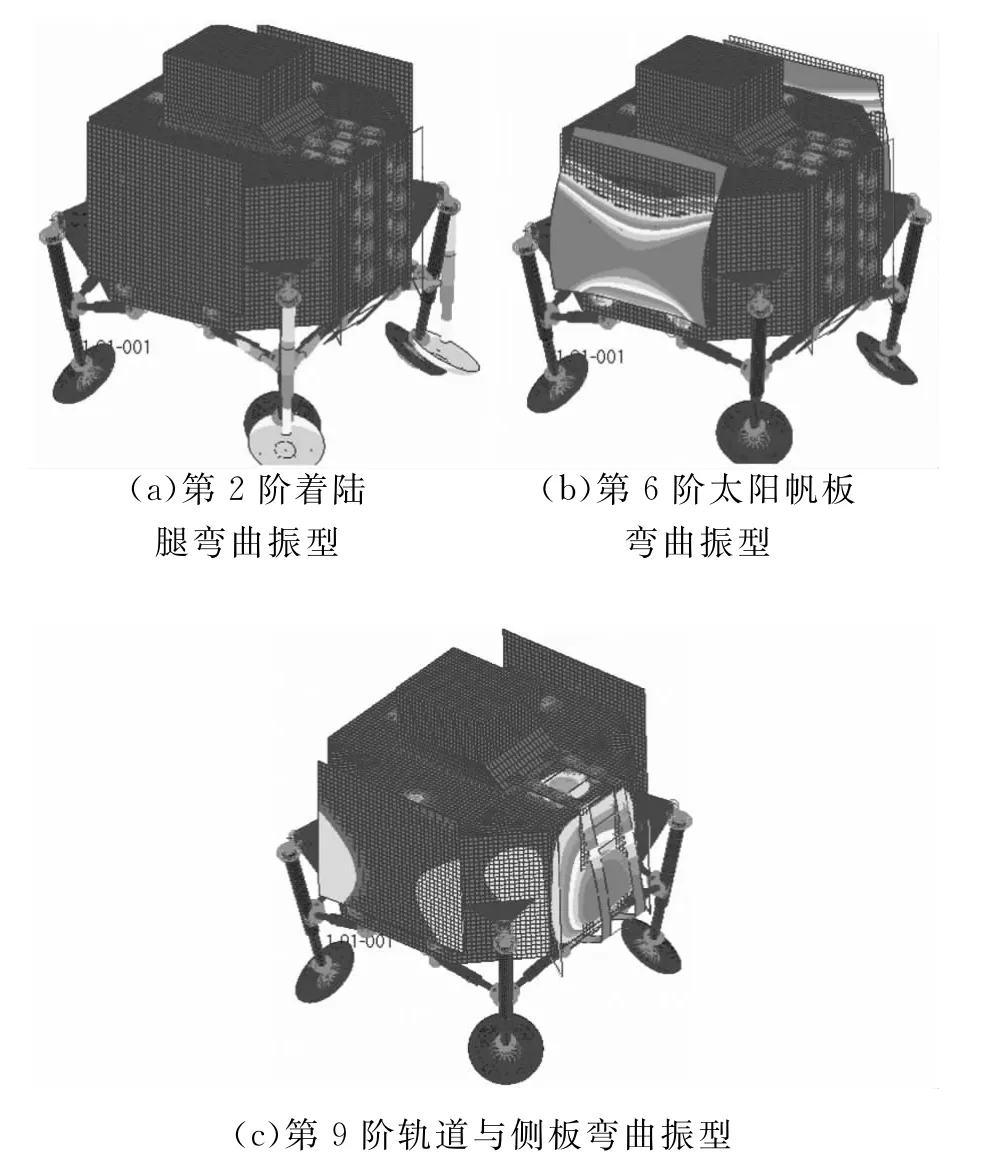
图6 着陆器收拢状态下局部振型图

表4 运载低频正弦载荷谱
本文针对上述低频正弦载荷激励对着陆器发射过程在收拢状态下进行频响分析,为突出主要问题,以运载激励对着陆器整机轴向激励为主要分析对象,忽略其他方向激励施加影响。结合发射阶段着陆器实际安装位置,上述激励施加点为着陆器机体与软着陆机构的连接点,所施加的频率—加速度载荷曲线如图7所示。
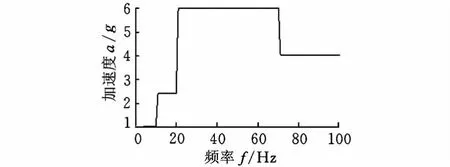
图7 施加于机体的频率—加速度载荷曲线
为研究着陆器关键机构及有效载荷,选取月球车中心点、主制动火箭中轴点、太阳电池帆板顶点及中心点、月球车轨道中心点及侧板中心点等关键机构及有效载荷的中心点为研究对象,经过分析,上述关键节点的加速度响应曲线如图8~图11所示。
通过对发射阶段着陆器及月球车、太阳电池帆板等关键机构进行频响分析,研究结果表明上述关键点加速度变化规律与模态分析结果吻合。其中最大输出节点加速度响应13.21g,该节点位于月球车降落机构中垂直轨道支撑梁处。从着陆器整体分析结果来看,在发射阶段,此轨道系统处于下垂状态,连接点处激励会引起轨道的较大幅度振动,该处为着陆器设计的薄弱环节。
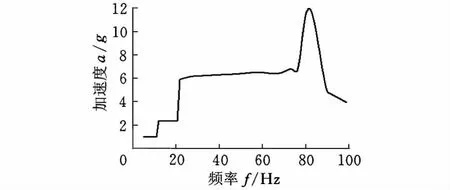
图8 月球车中心点的频率—加速度载荷曲线
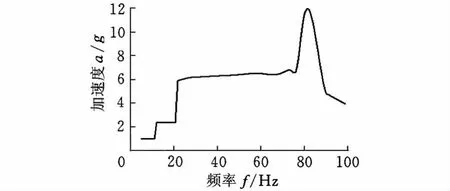
图9 主制动发动机中心点的频率—加速度载荷曲线

图10 太阳帆板顶点及中心点频率—加速度载荷曲线
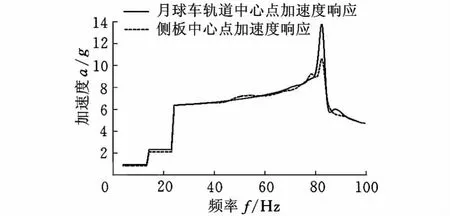
图11 月球车轨道及侧板中心点频率—加速度载荷曲线
5 结语
(1)结合课题组着陆器样机建立了包含月球车及降落系统、太阳电池帆板等在内的着陆器整机有限元模型,并对发射阶段处于收拢状态的着陆器整机进行模态分析,模态分析结果表明,着陆器振动以太阳电池帆板弯曲振动及着陆腿弯曲振动为主。
(2)发射阶段运载火箭不稳定燃烧会对着陆器及其关键机构及有效载荷带来不利影响,通过对发射阶段着陆器整机进行频响及模态分析,结果表明,除月球车降落机构轨道加速度响应较大外,着陆器整机其他各关键机构节点的加速度响应均在要求范围之内,该部分在工程实施中可在轨道下端增加锁定机构以提高其可靠性。
[1]Jon A L,John C.Lunar Lander Conceptual Design[R].Washington D C:NASA,1989:51-58.
[2]Dr George W.Botbyl,Final Design Report for the Self-Unloading,Reusable,Lunar Lander Project[R].Washington D C:B&T Engineering,Inc.,1991:29-33.
[3]陈金宝,聂宏,赵金才.月球着陆器软着陆缓冲机构关键技术研究进展[J].宇航学报,2008,29(3):731-735.Chen Jinbao,Nie Hong,Zhao Jincai.Review of the Development of Soft landing Buffer for Lunar Explorations[J].Journal of Astronautics,2008,29(3):731-735.
[4]陈金宝,聂宏,汪岸柳,等.月球软着陆系统关键技术研究与发展综述[J].中国机械工程,2006,17(增刊2):426-428.Chen Jinbao,Nie Hong,Wang Anliu,et al.Development of Soft Landing for Lunar Lander[J].China Mechanical Engineering,2006,17(S2):426-428.
[5]王少纯,邓宗全,高海波,等.月球着陆器用金属橡胶高低温力学性能试验研究[J].航空材料学报,2004,24(2):53-56.Wang Shaochun,Deng Zongquan,Gao Haibo,et al.Design of Impact Isolating Landing Legs for Micro-miniature Lunar Lander[J].Journal of Harbin Institute of Technology,2004,24(2):53-56.
[6]王少纯,邓宗全.新型涡流磁阻尼月球着陆器[J].上海交通大学学报,2006,31(12):2151-2154.Wang Shaochun,Deng Zongquan.A Novel Lunar Lander with Magnetic Damping of Eddy Current[J].Journal of Shanghai Jiaotong University,2006,31(12):2151-2164.
[7]陈金宝,聂宏,柏合民.铝蜂窝缓冲材料对着陆器缓冲性能影响试验分析[J].机械工程材料,2008,32(1):48-50.Chen Jinbao,Nie Hong,Bai Hemin.Study of Honeycomb on Buffering Performance of Lunar Lander[J].Material for Mechanical Engineering,2008,32(1):48-50.
[8]赵京东,王金昌,赵志军,等.基于半主动的小天体着陆缓冲器研究[J].振动与冲击,2010,29(8):78-80.Zhao Jingdong,Wang Jinchang,Zhao Zhijun,et al.Research on Buffer of Asteroid Lander on Semiactive Control[J].Journal of Vibration and Shock,2010,29(8):78-80.
[9]邓宗全,王少纯.三支撑月球着陆器缓冲性能试验研究[J].哈尔滨工业大学学报,2007,23(1):32-34.Deng Zongquan,Wang Shaochun.Experimental Research on Buffer Characteristics of Lunar Lander with Three Legs[J].Journal of Harbin Institute of Technology,2007,23(1):32-34.
[10]王少纯,邓宗全.月球着陆器用阻尼材料冲击性能试验[J].导弹与航天运载技术,2007(1):50-53.Wang Shaochun,Deng Zongquan.Experimental Research on Impact Characteristics of Damping Materials Used in Lunar Lander[J].Missiles and Space Vehicles,2007(1):50-53.
[11]王春洁,郭永.着陆器软着陆机构的动力学分析[J].北京航空航天大学学报,2009,35(2):183-187.Wang Chunjie,Guo Yong.Dynamic Analysis of Lunar Lander[J].Journal of Beijing University of Aeronautics and Astronautics,2009,35(2):183-187.
[12]梁东平,柴洪友,曾福明.月球着陆器着陆腿非线性有限元建模与仿真[J].北京航空航天大学学报,2013,39(1):11-15.Liang Dongping,Chai Hongyou,Zeng Fuming.Nonlinear Finite Element Modeling and Simulation for Landing Leg of Lunar Lander[J].Journal of Beijing University of Aeronautics and Astronautics,2013,39(1):11-15.
[13]逯运通,宋顺广,王春洁,等.基于刚柔耦合模型的月球着陆器动力学分析[J].北京航空航天大学学报,2011,37(11):1348-1352.Lu Yuntong,Song Shunguang,Wang Chunjie,et al.Dynamics analysis for Lunar Lander Based on Rigid-flexible Couple Model[J].Journal of Beijing University of Aeronautics and Astronautics,2011,37(11):1348-1352.
[14]王闯,刘荣强,邓宗全,等.月球着陆器着陆过程动力学分析[J].北京航空航天大学学报,2008,34(4):381-385.Wang Chuang,Liu Rongqiang,Deng Zongquan,et al.Dynamics Analysis of Lunar Lander’s Landing Process[J].Journal of Beijing University of Aeronautics and Astronautics,2008,34(4):381-385.
[15]苏庆华,赵剡.月球着陆器着陆安全分析方法[J].北京航空航天大学学报,2012,38(11):1522-1526.Su Qinghua,Zhao Yan.Analysis Method for Lunar Landers Landing Safety[J].Journal of Beijing University of Aeronautics and Astronautics,2012,38(11):1522-1526.
[16]胡亚兵,孙毅.腿式月球着陆器静态稳定性研究[J].中国空间科学技术,2009,23(2):18-26.Hu Yabing,Sun Yi.Research on Static of Lunar Lander with Legs[J].Chinese Space Science and Technology,2009,23(2):18-26.
[17]龙铝波,卿启湘,文桂林,等.基于ADAMS的着陆器软着陆稳定性仿真分析[J].工程设计学报,2010,17(5):334-338.Long Lübo,Qing Qixiang,Wen Guilin,et al.Simulation Analysis of Lander Soft landing’s Stability on ADAMS[J].Journal of Engineering Design,2010,17(5):334-338.
[18]陈金宝,聂宏,柏合民,等.月壤及缓冲支柱弹塑性变形对着陆器着陆性能影响分析[J].机械科学与技术,2008,27(12):1572-1575.Chen Jinbao,Nie Hong,Bai Hemin,et al.A Study of the Performance of Lunar Lander Considering the Deformation of the Buffering Struts and the Lunar Soil[J].Mechanical Science and Technology for Aerospace Engineering,2008,27(12):1572-1575.
[19]罗昌杰,邓宗全,刘荣强,等.基于零力矩理论的腿式着陆器着陆稳定性研究[J].机械工程学报,2010,32(11):38-45.Luo ChangJie,Deng Zongquan,Liu Rongqiang,et al.Landing Stability Investagation of Leggedtype Spacecraft Lander Based on Zero Moment point Theory[J].Journal of Mechanical Engineering,2010,32(11):38-45.
[20]高艾,崔平远,崔祜涛.深空着陆器对偶控制策略[J].哈尔滨工业大学学报,2012,26(11):75-80.Gao Ai,Cui Pingyuan,Cui Gutao.Dual Control Strategy of Planetary Lander[J].Journal of Harbin Institute of Technology,2012,26(11):75-80.
[21]Jan T B.Extended Modal Analysis Based on State-space Model Reveals New Information[R].AIAA-97-0942,1997.
[22]Mayuresh J P.Decoupled Second-order Equations and Modal Analysis of a General Nonconservative System[R].AIAA-2000-1654,2000.
[23]Aranda J,Crespo J.Modal Analysis Applied to Spacecraft Attitude Control[R].AIAA-2007-6444,2007.
猜你喜欢
新教育时代电子杂志(教师版)(2022年31期)2022-02-09 05:40:37
工业工程设计(2021年3期)2021-06-30 12:15:04
航天器工程(2019年4期)2019-11-11 03:41:00
伙伴(2019年12期)2019-01-17 04:38:56
北京航空航天大学学报(2017年4期)2017-11-23 05:48:48
太空探索(2016年9期)2016-07-12 10:00:05
红蜻蜓·低年级(2015年7期)2016-02-02 11:01:20
中学科技(2015年7期)2015-07-03 05:44:32
空间控制技术与应用(2015年4期)2015-06-05 12:22:40
发明与创新(2015年33期)2015-02-27 10:40:01