
VisSim软件在自动化专业实验教学中的应用
2013-09-03 07:26:56宋春宁黄清宝林小峰宋绍剑
实验室研究与探索 2013年11期
宋春宁, 黄清宝, 林小峰, 宋绍剑
(广西大学电气工程学院,广西南宁530004)
0 引言
VisSim是一套集成型软件,可快速完成TI公司系列的DSP以及MSP430微控制器的系统原型机的开发测试工作;可为控制算法及指定的片内外设生成标准ANSIC定点代码,并进行仿真;支持TIF243、LF2407、F2808、F2812、F28335以及 MSP430微控制器的评估板。VisSim包含电机模块,可用于基于交流感应电机、无刷直流电机、步进电机等运动控制系统的模拟以及产品代码的生成。该模块包括了PID、3相PWM驱动、空间矢量波形发生器、Park和Clarke变换、V-H剖面图、无传感器磁通、转子速度评估、正交解码速度计算器[1]。VisSim是一套图形化的原型建模软件,能进行控制策略的开发与验证,执行脱机参数调整;用户可在Windows的环境中执行即时模拟、数据采集和控制工作,无需编辑复杂的代码即可得到与真实回路硬件系统相匹配的结果。将非线性系统线性化;生成BODE图,根轨迹图,以及连续和离散系统的Nyquist分析;同时还提供极点布局控制设计。提供DSP、动态、电机、电力、液压、化学、热与涡轮机等模型资料库[2-4]。和Matlab建模软件相比,具有以下优势:①软件生成代码小,直接可下载到TI公司系列的DSP以及MSP430微控制器。② VisSim使用图形化界面,用户可非常简单地创建、修改、以及维护系统模型。仿真内核为线性、非线性、连续时间、离散时间、时变、SISO、MIMO,以及混合系统设计提供了快速精确的解决方案,可模拟线性、非线性、连续、离散系统、时变和混合系统。VisSim软件不仅可用于电力电子技术、电机、自动控制原理、嵌入式控制器DSP的实验教学,而且还可作为各们学科的仿真建模软件[5-8]。
虽然VisSim软件具有强大的功能,但是配套的实验箱并不多见,在国外,VisSim软件研发公司(Visual Soluctions)提供的风门控制实验箱。TI公司提供了再生能源控制装置。在台湾,卓傑企业有限公司研制了VisSim通用型DSP控制器系统,采用dsp2407实现了的数字滤波、输出信号控制,具有直流伺服马达位置控制系统,交流伺服马达驱动与位置控制系统,倒立摆系统控制,双螺旋桨MIMO系统控制实验。清云科技大学采用RT-DAC4和VisSim软件构建自动控制实验教学。西南石油大学采用VisSim软件进行“电力拖动自动控制系统”的仿真实验,另外一些高校主要应用VisSim软件进行风力发电、电机控制建模的研究[9-10]。
目前,本校的电力电子技术、电机、自动控制原理的实验,只能开设一些传统的、验证性和演示性的实验。内容单一、技术较落后,严重地影响学生的学习兴趣和教学效果。而且由于实验装置局限性,不能进行建模和仿真,控制算法不能更改,更不能产生控制程序代码。能够进行原型机开发的实验装置比较昂贵,如德国dSPACE实时仿真系统十几万元,固高Matlab实时控制软件10万元左右,并且这些软件产生的c代码较大,阅读性较差,且难以脱离开发环境。因此,我们采用VisSim软件、数据采集卡、TMS320F2812开发板等开发了以下实验。
1 基于数据采集卡的信号采集和显示
采用研华数据采集卡PCL1710,采用VC++建立嵌入VisSim软件的模块:AD采集、DA转换、IO控制、脉宽调制PWM等模块。
以信号采集和显示为例,图1是采集卡、VisSim软件构成的信号采集和显示框图。

图1 信号采集和显示
A/D10为外部信号发生器所给的方波,图2是由外部所给的信号采集的方波,而D/A0是由VisSim传给外部的示波器波形。

图2 方波信号采集测试
2 自控原理建模与控制
自动原理可开展BODE图、根轨迹图,以及连续和离散系统的Nyquist分析,极点布局控制设计,PID控制器等实验。
由于实验室条件所限,大多数的控制器设计开发要进行为半实物仿真。原因是:①控制对象的实物比较昂贵或无法进行多次实验,为了验证控制器设计的可行性,则采用控制器的半实物仿真。② 工业过程控制中,在实物环境下不能轻易调整控制器,只能离线调整,根据数学模型验证控制算法。采用VisSim软件及研制的实验箱可以开展半实物仿真,利用VisSim软件建立被控对象模型,设计控制算法,优化控制算法参数,以达到满意控制效果。
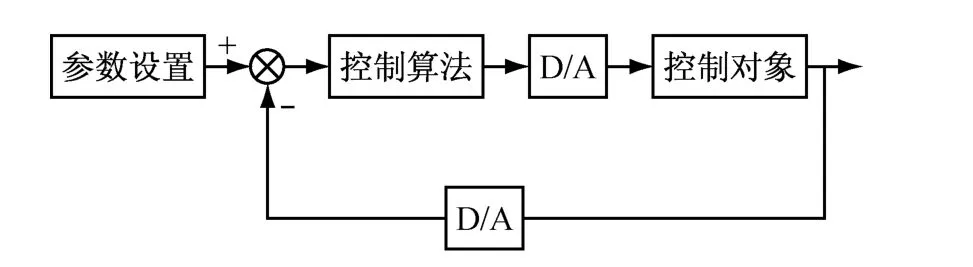
图3 是VisSim半实物仿真框图
以设计一个控制器为例,欲将状态x1(t)、x2(t)追踪xd1(t)、xd2(t)。其状态方程如下:


图4 控制器设计仿真
3 基于DSP嵌入式系统的帆板模糊控制
图5是基于DSP嵌入式系统VisSim实验箱的结构框图,主要由以下部分构成:① TMS320F2812开发板[11];② dsp仿真器;③ 12位 DA板;④ 数字量光电隔离输出;⑤模拟信号调理电路;⑥ 数字量光电隔离输入;⑦ 智能模块IPM;⑧ 编码器输入;⑨ LED状态指示;⑩帆板、12 V直流电机风扇。

图5 基于DSP嵌入式系统Vissim实验箱
帆板控制原理:电扇吹动帆板旋转一定的角度,编码器将产生具有一定频率、相差90°的脉冲的信号(旋转角度的大小决定正负号)。实验箱上的正交编码脉冲(QEP)电路将对编码器产生的信号进行脉冲计数[12],经过标度变换可以得到精确的帆板旋转角度。将设定值和旋转角度作为输入,运用模糊控制算法计算PWM控制量,控制IPM智能模块,实现对风扇转速进行控制。
在VisSim中所使用的模糊控制功能模块的建模是通过VC++编译所完成的。该模块以帆板旋转的角度设定值和实际值作为输入,PWM控制量作为输出。完成包括误差和误差变化率的计算,量化处理、查表和解模糊化的响应过程得到控制量的功能[13-16]。所完成的模糊控制功能模块如图6所示。所建立的VisSim程序中的旋转编码器旋转角度计算模块和PWM信号的计算与输出模块,如图7和8所示。程序中将帆板角度设定值和实际值、PWM输出值以图形的形式显示,方便用户的观察与控制。
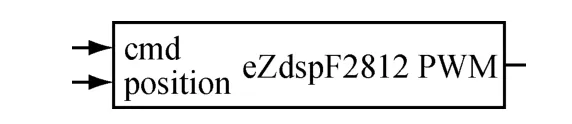
图6 模糊控制器功能模块

图7 PWM信号的计算与输出模块

图8 模糊控制结果
从图8可以看出,模糊控制几乎没有出现超调现象,且稳定时间也较短。体现了模糊控制系统对于动态系统的优越性。
4 教学实施及效果
我们编写VisSim软件配套实验指导书,实验装置可开出6个基本实验内容和3个综合设计内容,学生通过学习使用VisSim软件,借助于VisSim软件平台进行,并在相应的实验装置得以实施。实验3人一组,实验前学生根据实验内容先做预习报告,预习报告经任课老师批改,才允许学生做实验。实验前由实验教师简要介绍本次实验的内容与要求,示范仪器设备的使用和操作方法。学生做实验,实验中遇到问题由实验教师或任课教师只作少量提示,鼓励学生自行找到解决办法。通过VisSim软件对被控制对象的建模,设计控制算法,观察仿真输出波形,可灵活调整参数实现建模、控制算法优化设计。因此,学生不但可以清楚地理解原理,而且能培养他们独立思考和自学的能力,仿真验证的参数可进行实际系统调试,可起到事半功倍的效果。VisSim实验装置有助于培养学生的建模、控制算法设计与综合应用的能力,提高设计控制算法水平和实验技能,增强他们分析问题能力,培养学生综合运用所学知识解决实际问题的能力和创新研究能力。
5 结语
VisSim软件不仅可以采用自身定义的模块进行建模,而且可以嵌入 C++、Matlab、Mathcad、Maple建立的模块,采用VisSim软件不仅可开展电力电子技术、电机控制、自动控制原理、嵌入式控制器dsp的实验,而且将数学建模与这些课程有机结合在一起,使数据采集、控制策略、数字控制相结合,有效提高学生的综合素质和创新能力。
[1] Visual Solutions,Inc.VisSim User’s Guide Version 7.0[Z].2008.
[2] 纪志成,程永奇,沈艳霞.基于VisSim永磁同步电机矢量控制系统建模与仿真[J].系统仿真学报,2006,17(7):1569-1573.
[3] Ustun O,Yilmaz M,Tuncay R N.Simulation of power electronic circuits using VisSim software:a study on toolbox development[C]//Computers in Power Electronics.2000:183-187.
[4] Ozgur Ustun.Design,Analysis,and Control of a Novel Linear Actuator[J].IEEE Transactions on Industry Applications,2006,42(4):1007-1013.
[5] Jan T Bialasiewicz.Renewable Energy Systems With Photovoltaic Power Generators:Operation and Modeling[J].IEEE Transactions on Industrial Electronics,2008,55(7):2752-2758.
[6] Stephen P Tseng,Hu S S,Shaw J S.Control and Motion Cues Generation of Stewart Platform with a DSP Based Controller[C]//Proceedings of the 2005 IEEE International Conference on Mechatronics,2005:96-101.
[7] 谢文涛,童 玲,王 毅.基于VisSim/ECD的直流电机控制系统设计[J].单片机与嵌入式系统应用,2006(6):39-41.
[8] 李元龙,吴定会,纪志成.基于VisSim的SCIG风力发电机组动态模型建模与研究[J].微特电机,2009(7):4-7,61.
[9] 李红伟,王洪诚,赖 欣.VisSim在“电力拖动自动控制系统”教学中的应用[J].电气电子教学学报,2008,30(2):90-95.
[10] 李红伟,王洪诚.永磁同步电机矢量控制系统的VisSim建模与仿真[J].电机与控制学报,2007,11(5):533-537.
[11] 苏奎峰,吕 强.TMS320F2812原理与开发[M].北京:电子工业出版社,2005.
[12] 潘明东.光电编码器输出脉冲的几种计数方法[J].电子工程师,2004,30(8):69-71.
[13] 石辛民,郝整清.模糊控制及其MATLAB仿真[M].北京:清华大学出版社,2008.
[14] 李 宁,张乃尧.采用不同的模糊推理方法时典型模糊控制器的结构分析[J].模糊系统与数学,1998,12(3):85-92.
[15] 王立新.模糊系统与模糊控制[M].北京:清华大学出版社,2003.
[16] 郑金幸.采用DSP的感应加热模糊控制器的设计[C]//第五届工业电子及应用的IEEE会议,2010:2276-2280.
猜你喜欢
新教育时代电子杂志(教师版)(2022年31期)2022-02-09 05:40:37
制造技术与机床(2017年6期)2018-01-19 02:41:07
西南交通大学学报(2016年3期)2016-06-15 20:29:35
电子制作(2016年21期)2016-05-17 03:53:01
通信电源技术(2016年5期)2016-03-22 01:09:57
红蜻蜓·低年级(2015年7期)2016-02-02 11:01:20
电源技术(2015年11期)2015-08-22 08:50:38
空间控制技术与应用(2015年4期)2015-06-05 12:22:40
电源技术(2015年9期)2015-06-05 09:36:06
发明与创新(2015年33期)2015-02-27 10:40:01
