纯电动和串联式混合动力汽车电机传动系参数匹配*
2013-09-03 10:06:26宋珂,章桐,3
汽车工程 2013年6期
宋 珂,章 桐,3
(1.同济大学汽车学院,上海 201804; 2.同济大学新能源汽车工程中心,上海 201804; 3.同济大学中德学院,上海 200092)
前言
电机和与其相连的传动系统是电动汽车传动系统关键部件。电机传动系统参数的选择不仅决定电动汽车的动力性和经济性,而且影响动力系统构型、控制策略、制造成本和系统尺寸。纯电动汽车和各种串联形式的混合动力汽车,如内燃机串联式混合动力、电电混合燃料电池汽车、增程式纯电动汽车等,仅由电机提供行驶转矩,可以认为它们的电机传动系统参数设计方法相同;并联式和混联式混合动力汽车需要考虑电机和内燃机共同驱动车辆的情况。现有相关研究主要集中在电机本身的选型、参数设计和控制,用以提高电机性能,而电机参数选取对车辆动力性能的影响研究较少[1-2];对如何匹配电动汽车的电机传动系统参数,多限于电机功率、转矩和转速选取,针对传动比已知和未知两种不同情况下如何匹配电驱动系统参数,报道较少[3-6]。本文中主要针对纯电动和串联式混合动力汽车电机传动系的参数匹配设计展开论述。首先理论分析电机扩大恒功率区系数(电机最高转速与额定转速之比)的选取对车辆动力性能的影响,接着给出电动车电机传动系统主要参数匹配流程和方法,最后用实例验证该方法的可行性和有效性。
1 电机扩大恒功率区系数对整车动力性能的影响
1.1 满足加速性能要求的电机峰值功率
图1给出典型的电动汽车用驱动电机的转速-转矩特性曲线。转速低于额定转速ne时电机具有恒转矩特性,位于ne和最高转速nmax之间时电机具有恒功率特性。定义nmax与ne之比为电机扩大恒功率区系数k。
由汽车驱动阻力平衡公式得爬坡坡道角为
式中:fr为滚动阻力系数;D为动力因数;Ft为驱动轮上的驱动力,N;Fw为空气阻力,N;v为车速,m/s;M为车辆质量,kg;i0、ig分别为主减速比和变速器传动比;ηT为电机输出轴到驱动轮之间传动系的机械传动效率;rd为驱动轮半径,m;ρ为空气密度,kg/m3;CD为空气阻力系数;A为迎风面积,m2。
由电机特性和系数k可求得电机峰值转矩Tmax为
式中:Pm为电机峰值功率,kW。
由式(1)~式(3)可知坡道角α为系数k的函数。
从静止加速到某一较高车速vf所需时间ta可表示为
式中:δ为旋转质量转换系数;ve为电机额定转速所对应的车速,m/s。
式(4)为Pm和ve的超越方程,对于某给定加速时间ts,可以确定满足加速性能约束条件的Pm和ve。要获得式(4)的解析解非常困难,通常用数值解法求解。参考文献[7]中给出车辆加速运动时所需电机功率Pt的近似公式为
文献[7]中假设车辆速度和加速时间之间是二次幂关系,见式(7),代入式(8)滚动阻力和空气阻力平均消耗功率公式,求得式(6)中等号右边后面两项,即克服滚动阻力和空气阻力所需功率。研究中发现利用数值解法求解式(4),获得的加速所需电机峰值功率值Pm大于式(6)计算得出的电机功率值Pt。假设k=4,将表1中给出的车辆参数代入式(6),求得电机功率为87.82kW(设传动系效率为0.9),用Matlab的quad和fzero函数求解式(4)得到的电机功率为88.159kW。两者的差异在于实际车辆速度和加速时间之间更接近式(9)三次幂函数关系,其中a1~a4为常系数,由整车参数和加速性能要求决定。由式(10)可得电机峰值功率为88.159kW,其它参数同表1条件下的车辆加速时间与车速之间的关系见图2。从图中可见,三次幂函数能更好地反映实际车速与加速时间之间的关系。
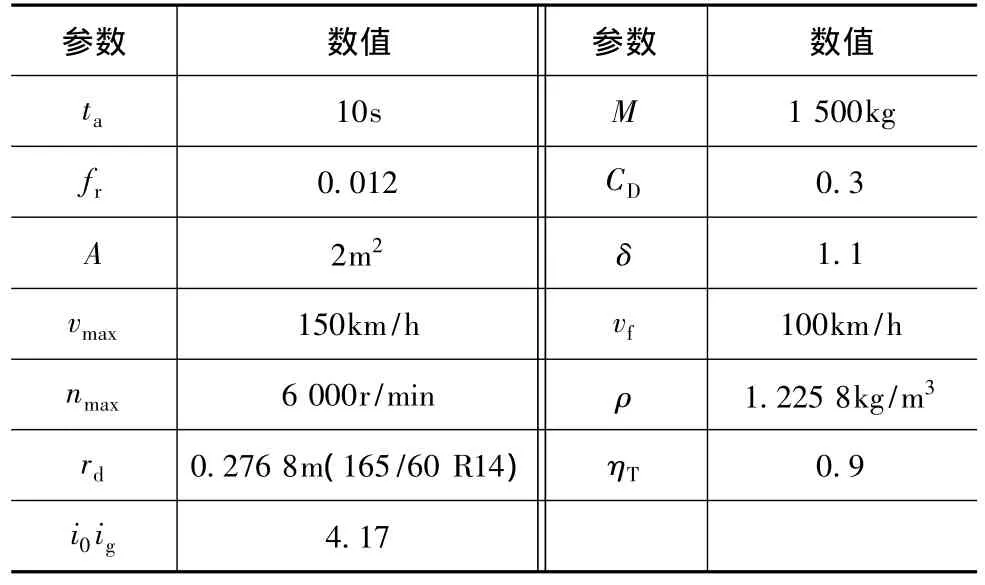
表1 计算时所用车辆参数
1.2 给定电机最高转速nmax,加速性能要求相同时,系数k对所需电机峰值功率的影响
假设车辆0-100km/h加速时间要求是10s,电机最高转速对应最高车速vmax,可由不同的k值得到额定车速ve,然后利用式(4)求解关于Pm的超越方程,结果见表2。图3为给定电机最高转速,相同加速性能要求下不同k值对应电机的转速-转矩特性曲线。图4和图5分别为电机最高转速一定时,为满足加速时间的要求,不同k值所需要的电机峰值功率和电机峰值转矩。由图3~图5可见,满足相同的加速性能要求,k值越大的电机,所需要的电机峰值功率越小,同时所能提供的低速峰值转矩越大。对电动汽车而言,电机峰值功率降低可选择较小的车载电源,减轻整车质量和制造成本;低速时驱动转矩大能增强爬坡能力。但当k>5后,这种功率降低的趋势不再明显,而峰值转矩增加的趋势依旧。
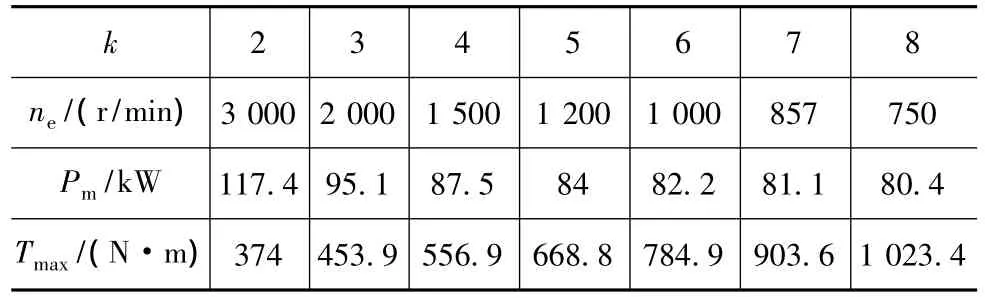
表2 10s加速时间要求下不同k值所需的电机峰值功率和峰值转矩
1.3 给定电机峰值功率Pm和电机最高转速nmax时,系数k对车辆加速性能和爬坡能力的影响
由式(3)和系数k定义得到不同k值情况下电机转速-转矩特性曲线(假设电机峰值功率30kW,其它参数同表1),如图6所示。当给定电机峰值功率和电机最大转速,随着k值的增加,电机能更快地达到峰值功率输出,同时恒转矩区段的峰值转矩也迅速增大,这样能够提高车辆加速性能和爬坡能力。为详细说明系数k变化对车辆加速性能的影响,用数值方法分段求解式(4),得到0-100km/h加速过程中恒转矩段和恒功率段所需要的时间,如表3和图7所示。随k值增加,恒转矩区和恒功率区加速时间呈现相反的变化趋势。其中恒转矩区加速时间t1逐渐减小,恒功率区加速时间t2逐渐增大,当k大于某值时(例中k>4),各自变化的趋势均趋缓,且因t1变化趋势大于t2,车辆总的加速时间ta随k增加而减小,加速性能提高。
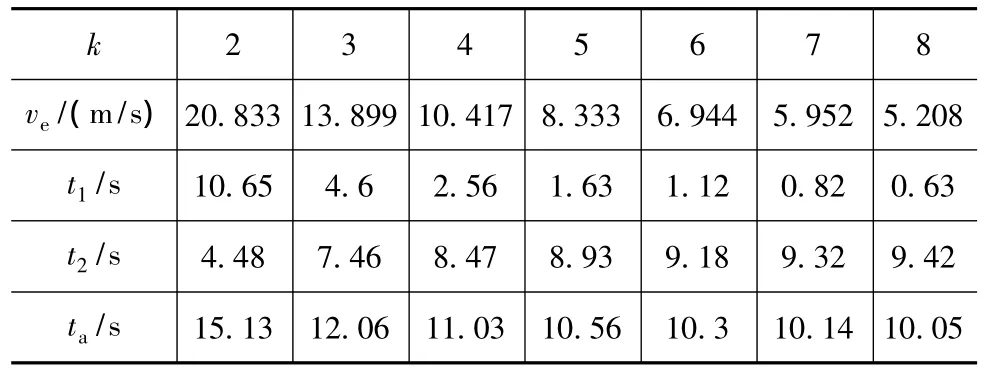
表3 不同k值0-100km/h加速时间
由以上分析可知,匹配较大的扩大恒功率区系数k可以选择峰值功率较小的电机来满足加速和爬坡性能要求,降低车载电池等能量源的功率等级和尺寸大小,简化动力系统结构,节约制造成本。而对于给定功率大小的电机,较大的k值同样可以得到更大的电机峰值转矩,提高车辆加速和爬坡能力。需要指出的是,以上两种情况均系在限定电机最高转速的情况下的分析。电机输出峰值转矩的增大要求电机具有更高的支撑能力,同时要求电机和电子设备能承受更大的通过电流,从而增加了硅钢片尺寸和传导损耗[8]。为减小电机峰值转矩过大带来的不利影响,同时保证电机有较大的扩大恒功率区,可在保持额定转速不变的情况下,选择高速电机,即提高电机最高转速nmax。
1.4 给定电机峰值功率和额定转速ne时,系数k对车辆动力性能的影响
由式(4)和表3可知,当电机峰值功率给定时,加速时间由电机额定转速对应的车速决定。ve越小,从零加速到vf所需时间越短。nmax提高后对电机功率和低速区电机转矩无影响,但传动系减速比i0ig增大,额定转速对应的车速ve减小,从而提高车辆加速性能。求解式(4)得到满足加速性能要求的最大ve值,设为vta(说明为了满足加速时间要求,存在一个最大额定转速对应的车速,当传动系速比已知时,即是存在一个电机最大额定转速),即
而电机最高转速对应的车辆最高车速为
由式(5)、式(11)和式(12)得
式(13)给出电机峰值功率Pm一定时,同时满足加速性和最高车速要求的电机扩大恒功率区系数需要超过的阈值。实际上k值的大小取决于电机类型和控制策略[9]。一般感应异步电机通过弱磁作用后 k 值能达到 3 ~5[8,10];永磁无刷直流电机和永磁同步电机由于存在永磁体,通常k<2。通过相绕组解耦处理后,k值能够达到4。开关磁阻电机因结构简单且没有转子导体,一般k值能达到6~8[11]。
2 电动汽车用电机主要参数匹配流程和方法
电动汽车用电机主要参数包括峰值功率、最高转速、峰值转矩、额定功率和额定转速等。匹配的原则是在满足车辆性能要求的前提下,尽量降低电机峰值功率,简化传动系统结构。电机参数的匹配选择是一个多变量问题,往往从已有参数出发,利用车辆性能约束条件求解其余参数,且可分为传动系速比已知或未知两种情况。图8为电机各主要参数匹配选择的正向设计流程。
2.1 已知设计值vmax,ta,某车速下最大爬坡角度αmax及传动系速比i0ig
(1)电机峰值功率 取平直路面上最高车速匀速行驶时所需功率P1、某给定车速va匀速爬坡(坡度角为α)所需功率P2和满足ta加速要求所需功率P3三者间的最大值为电机峰值功率Pm。
根据所选电机类型初步确定扩大恒功率区系数k,假设电机最高转速对应最高车速,可得电机额定转速对应的车速,代入式(4)中求得满足加速时间要求的电机功率,即P3。则电机峰值功率为
(2)电机额定功率 可根据最高车速匀速行驶时所对应的电机功率或某一较低车速下克服较小坡度持续匀速行驶所需电机功率来确定电机额定功率。
式中:vg为设定的较低爬坡速度,m/s;ag为设定的较小坡度角;P4为该行驶状况下所需功率,W。
(3)电机最高转速与额定转速 已知最高车速和传动系速比,可利用式(12)和式(13)求得电机最高转速和额定转速。
(4)电机峰值转矩 确定电机峰值功率和额定转速后,由式(3)求得电机峰值转矩。
2.2 已知设计值vmax,ta及某车速下最大爬坡角度αmax,传动系速比 i0ig未知
(1)电机峰值功率 方法同2.1节。
(2)电机额定功率 方法同2.1节。
(3)电机最高转速与额定转速 由电机类型和设定的k值可以初步选定nmax。且由前面的分析可知,较大的nmax有利于降低电机起动转矩对电机支撑能力的要求。电机最高转速对应最高车速,由式
(12)求得车辆减速比i0ig。根据系数k定义利用式
(13)求得电机额定转速。
(4)电机峰值转矩 方法同2.1节。
3 设计实例
采用上述方法和流程,现以某燃料电池轿车为例,匹配电驱动系统主要参数。该型燃料电池轿车为电/电混合动力系统构型,单电机前置配备单级减速机构提供驱动力。燃料电池堆和动力蓄电池并联,共同提供电机所需电能。整车主要参数和设计指标如下:M=1900kg(半载),A=2.156m2,CD=0.312,rd=0.317m,fr=0.012,i0ig=8.928,vmax≥150km/h,ta≤13s(0-100km/h),amax≥11.3°。按前述方法匹配得到的传动系统参数为:Pm=101.77kW,Pe=35.2kW,nmax=11207r/min,ne=4483r/min,k=2.5,Tmax=217N·m。综合考虑系统效率和国内车用驱动电机技术与工艺水平等因素,最终确定传动系统技术参数为:Pm=110kW,Pe=45kW,nmax=12000r/min,ne=4600r/min,k=2.6,Tmax=230N·m。
4 结论
理论与数值分析结果表明,车速与加速时间关系更接近三次幂函数关系。通过数值方法能较准确地求取满足加速性要求所需电机峰值功率。车用驱动电机选择较大的扩大恒功率区系数可用较小的电机峰值功率满足电动汽车动力性能要求。而对于功率一定的电机,较大的扩大恒功率区系数可获得更好的加速性能,恒转矩区能获得更大的峰值转矩。为在不过分增大电机输出轴转矩的前提下获得较大的扩大恒功率区系数,选用高速电机,增大电机最高转速是有效方法。最后给出在传动减速比已知和未知两种情况下,一般纯电动和串联式混合动力汽车车用驱动电机参数匹配的正向设计流程与方法。实例验证所提出的流程和方法切实可行,对该型电动汽车的开发具有一定的指导意义。
[1]Pellegrino G,Vagati A,Guglielmi P,et al.Performance Comparison Between Surface-Mounted and Interior PM Motor Drives for E-lectric Vehicle Application[J].IEEE Transactions on Industrial E-lectronics,2012,59(2):803-811.
[2]Chu L,Yin J,Yao L,et al.The Method for Matching The PMSM's Base Parameters of The Hybrid Electric Vehicle Based on Drive Cycle[C].2011 International Conference on Electronic & Mechanical Engineering and Information Technology,2011:3234-3237.
[3]Zhao H,Zhang B,Zhang B.Research on Parameters Matching of Parallel Hybrid Electric Vehicle Powertrain[C].2008 Vehicle Power and Propulsion Conference(VPPC),2008:1-4.
[4]Wu X,Lu L,Hu M,et al.Pattern Matching and Simulation Research of Extended Range Electric Vehicle[C].2011 International Conference on Electronic and Mechanical Engineering and Information Technology(EMEIT),2011:2590-2595.
[5]Lü C,Zhang J.Research of Parameter Design and Matching of Powertrain System in Plug-in Hybrid Electric Vehicle[C].2011 International Conference on Electric Information and Control Engineering(ICEICE),2011:2490-2493.
[6]Ehsani M,Gao Y,Emadi A.Modern Electric,Hybrid Electric and Fuel Cell Vehicles[M].Second Edition.Boca Raton:CRC Press Taylor& Francis Group,2010.
[7]Rahman K,Ehsani M.Performance Analysis of Electric Motor Drives for Electric and Hybrid Electric Vehicle Applications[C].IEEE Power Electronics in Transportation,1996:49-56.
[8]Ehsani M,Rahman K,Toliyat H.Propulsion System Design of E-lectric and Hybrid Vehicles[J].IEEE Transactions on Industrial Electronics,1997,44(1):19-27.
[9]Toliyat H,Rahman K,Ehsani M.Electric Machines in Electric and Hybrid Vehicle Applications[C].Proceeding of ICPE'1995,1995:627-635.
[10]Gao Y,Maghbelli H,Ehsani M.Investigation of Proper Motor Drive Characteristics for Military Vehicle Propulsion[C].SAE Paper 2003-01-2296.
猜你喜欢
当代陕西(2021年13期)2021-08-06 09:24:32
当代工人(2020年1期)2020-05-11 11:47:32
四川冶金(2018年1期)2018-09-25 02:39:26
汽车维护与修理(2018年1期)2018-04-04 01:13:22
国际木业(2016年10期)2016-12-21 03:12:38
通信电源技术(2016年1期)2016-04-16 04:57:26
电机与控制应用(2015年3期)2015-03-01 03:49:59
汽车维护与修理(2015年5期)2015-02-28 12:16:34
警察技术(2015年6期)2015-02-27 15:38:33
警察技术(2013年1期)2013-03-20 14:11:16