汽车变速杆操纵舒适性的矢量描述与聚类分析*
2013-09-03 10:06:18刘明周周维维张大伟沈维蕾
汽车工程 2013年6期
刘明周,周维维,张大伟,扈 静,沈维蕾
(合肥工业大学机械与汽车工程学院,合肥 230009)
前言
汽车变速杆的操纵舒适性对汽车操纵性有较大的影响[1]。影响变速杆操纵舒适性的因素很多,包括操纵过程产生的力、位移和角度等因素,其中操纵力是最能直观反映操纵舒适性的因素。
目前国内外学者对操纵力舒适性研究较少,多数研究集中在车辆静态舒适性和振动舒适性等方面[2-4]。文献[5]中以手柄力与手柄位移之间关系曲线为制动器操纵舒适性指标,提出采用Hausdorff距离度量舒适性曲线间的逼近度,以此为优化设计的目标,建立制动操纵舒适性优化设计模型。文献[6]中对汽车驾驶室“人-机”系统中操纵舒适性影响因素(相对代谢率、冲量、操纵力极值、极值点个数和斜率)进行了研究,采用模糊综合评价法对其进行评价,构建了汽车操纵舒适性评价系统,但此类方法对操纵力舒适性的分析和评价不够精确和可靠。
本文中从人体作业强度和心理感知强度两个方面考虑人体舒适性。在自制操纵装置操纵力实验台上模拟变速杆操纵过程,采集相应的样本数据,通过分析操纵力与作业强度和感知强度的映射关系,对操纵力舒适性进行矢量描述,并进行模糊聚类分析,实现对操纵力舒适性等级的有效划分。
1 相关参数
影响人体舒适性的关键因素主要是生理因素和心理因素。通过驾驶人能量消耗和心理感知两方面描述人体舒适性,其指标分别为作业强度和感知强度。通过建立操纵力与其评价指标的影响关系,研究操纵力舒适性的矢量描述和等级划分。
1.1 操纵力与作业强度的映射关系
人体进行作业或运动时所消耗的总能量,叫能量代谢量E。单位时间、单位表面积消耗的能量记为能量代谢率M,单位为kJ/(m2·h)。对于确定的作业个体,能量代谢量与作业强度直接相关,是评价作业负荷的重要指标。不同的驾驶人,由于体质的差异,其能量代谢不同。为消除作业者之间的差异因素,常用相对代谢率MR来衡量作业强度。本文中作业强度特指相对代谢率。
式中:M为能量代谢率,包括作业代谢率和安静代谢率,其中,作业代谢率可表示为操纵力F和操纵位移S的乘积;R为安静代谢率,即单位时间、单位表面积内,机体为保持各部分的平衡和某种姿势所消耗的能量;B为基础代谢率,反映单位时间、单位表面积人体的能量消耗量。为消除由于各物理量之间单位和量级造成的不同,常将各物理量进行无量纲化处理。根据文献[7]得到中国人的基础代谢率平均值,如表1所示。
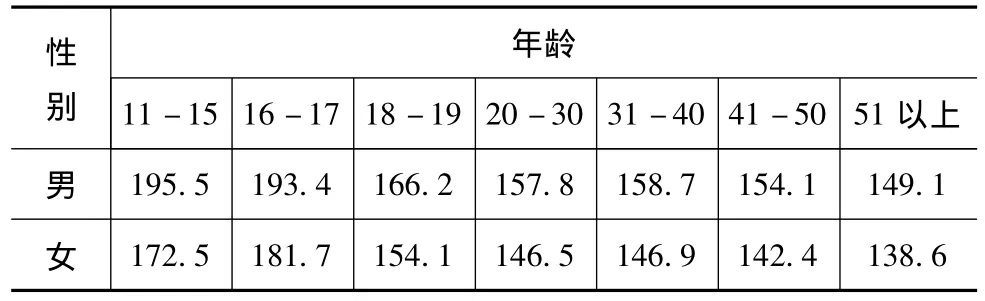
表1 中国人的基础代谢率平均值kJ/(m2·h)
1.2 操纵力与感知强度的映射关系
由于操纵力和操纵量之间存在一定的比例关系,因此操作者在分辨用力大小时,必须在力的差别达到或超过一定数值的情况下才能分辨出来,这个可分辨的力的最小差值称为差别阈值[7]。人体能够识别的操纵力差别阈值如图1所示。
感知强度是一种随物理刺激的大小而产生心理感觉变化的测度[8-9]。感知强度的大小取决于刺激的强弱,因此,操纵力的大小直接影响感知强度的大小。假设差别阈值不小于操纵力的大小,根据史蒂文斯幂定律,感知强度和操纵力的关系式为
式中:ψ为感知强度;φ为变速杆操纵力;φ0为操纵力的差别阈值;h为常数;q为代表感知强度随操纵力而变化的快慢程度的指数。式(2)经对数转换变成:
由式(3),可通过线性回归来确定感知变化率q和常数h。实验所得相关数据如表2所示,对数据进行直线拟合,如图2(a)所示,图中给出了拟合直线方程。在此基础上,确定变速杆不同操纵方式下的感知变化率q和常数h,得到感知强度随操纵力的变化曲线,如图2(b)所示。
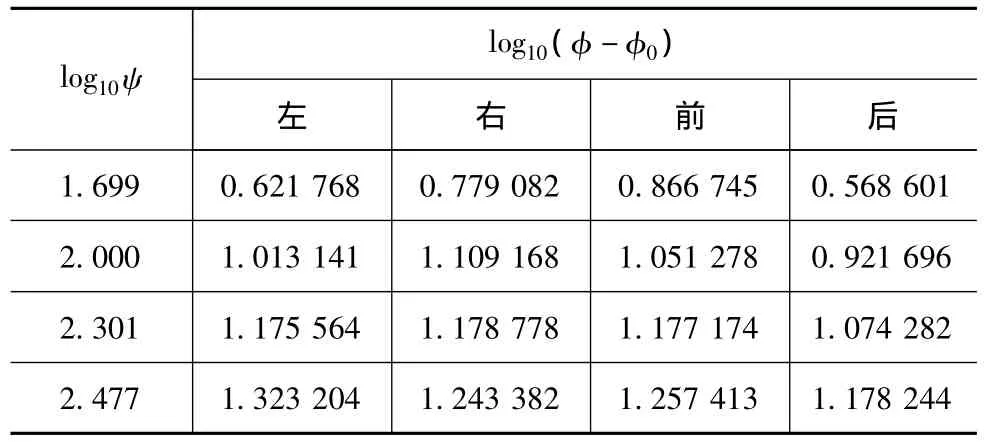
表2 感知强度对数与操纵力差量对数表
1.3 舒适性矢量描述
欧氏距离是描述距离最常用的函数之一[10]。以欧氏距离理论为基础,对操纵力舒适性进行矢量描述。具体方法如下:将实验过程中所采集得到的操纵力数据信息随机划分为初始样本和待分析样本,所述初始样本小于待分析样本;分别逐一计算初始样本和待分析样本中操纵力所对应的作业强度和感知强度,计算待分析样本和初始样本之间作业强度的欧氏距离D1(i),以及待分析样本和初始样本之间感知强度的欧氏距离 D2(i);针对 D1(i)和D2(i),将操纵力舒适性描述为矢量点集:(D1(1),D2(1),D1(2),D2(2),…,D1(m),D2(m)),这些矢量将被用于随后的模糊C-均值聚类分析。
2 聚类分析
最舒适的操纵力应同时满足作业强度低和感知强度高两个方面的要求。但操纵力过低,会导致感知强度低,甚至达不到操纵目的;操纵力过高,则作业强度较高,容易产生疲劳,甚至会对身体造成损伤。因此,对操纵力舒适性的等级划分就成为本文的研究重点。
模糊C-均值聚类算法(FCM)[11]基于最小类内加权平方误差和准则,其算法描述如下。

其中:U={ujk},V={vj}
其约束为
在式(5)约束下优化式(4)得
先给出初始方案,通过式(6)和式(7)反复迭代,使式(4)的目标函数值达到极小。将上述所得操纵力舒适性矢量点集作为聚类样本集,设定聚类数为5,通过Matlab实现具体聚类划分功能。
3 实验方法
3.1 仪器
实验采用自制设备——操纵装置模拟实验台,采集和分析汽车行驶过程中各种操纵力的数据。设备选用12位高性能模拟量与数字量I/O数据采集卡,采样速率可达到110千次/s,它可在各种环境下实现高速率连续平滑的数据采集。采用LSA-A-S1变速杆操纵力传感器,可同时获取x和y两个方向的分力。该传感器质量约100g,装在操纵杆上不会明显影响操纵过程,其可承受的最高载荷为300N。变速杆的操纵力一般不超过200N,因此,此传感器满足要求。
将传感器安装在实验平台的变速操纵杆上,通过信号线连接到装有采集卡的工作站上,操纵变速杆就可采集到相应的数据。
3.2 对象
选取58名身体健康的驾驶人参加实验,其中43名男性和15名女性,年龄在18~45岁(平均年龄28.6岁,标准差为2.7),平均身高是170.6cm,平均体质量为66.8kg。这些驾驶人包括出租车驾驶员、大学教师和大学生。所有实验对象都用右手操作,且驾龄均在两年以上。
3.3 实验设计
由于不考虑路况和行驶速度等的影响,在不失一般性的情况下,假定在平坦的路面上完成相关的动作。驾驶人操纵力的大小,取决于人体操作的姿势、着力部位、力的作用方向和用力方式。针对驾驶环境下操纵力的发生条件,要求在坐姿条件下测量驾驶人操纵变速杆时的作用力。实验参与者分别从左、右、前、后4个方向操纵变速杆。4个方向操纵力的测量顺序是随机的,分别记录胳膊的4种用力方式。每个方向从开始到结束的操纵过程大约持续0.2s,选取这一时间段的作用力平均值为研究对象。用前臂和手操作的操纵杆,一般最大操纵力在15~60N。操纵力数据采集方式如图3所示。
4 结果与讨论
参照汽车振动舒适性的等级划分和相关参数的选取要求,将舒适性划分为3个等级,即很舒适、舒适和很不舒适。但选取的参数评价标准是相反的,为了便于区别和分析,本文中将聚类数目设定为5。
对采集的232个(每人采集4个方向的力)样本数据进行预处理,将其对应的作业强度和感知强度数据点集描述成舒适性矢量形式。通过模糊C-均值聚类分析,形成了如图4所示的作业-感知强度二维散点图。
由图4可见,样本数据被清晰而规则地划分为5类,从左至右依次标记为Ⅰ、Ⅱ、Ⅲ、Ⅳ、Ⅴ区,其中Ⅲ区数据相对比较集中,被描述为很舒适区域。此区域作业强度处于[0.48,0.58]之间。由日本能率协会对作业强度的分级标准[12]可知,此区域的作业强度属于极轻作业,其工作特点是坐姿条件下手和手指的动作,能量消耗很小,而变速杆的操纵正是在此条件下进行的。在很舒适性区域,感知强度的范围为[167,248],而人体的触压觉的感觉阈值[7]一般在120左右,因此,该区域的操纵者能感受到较强的心理感觉,但还不会引起相应器官的损伤。
在Ⅱ区中,虽然作业强度值较小,但感知强度也相应较小。该区域的感知强度在[110,160]之间,也就是刚刚达到感觉阈值,不会给人强烈的触压感觉。在Ⅳ区则相反,感知强度较大,而作业强度也较大,相应的能量消耗也很大,但也不会对人体造成损害。因此,将Ⅱ、Ⅳ区域的操纵力定义为舒适区间。但在Ⅰ、Ⅴ区都有较大的超出标准或者阈值范围的情况,如Ⅰ区,感知强度很小,达不到人体触压的感觉阈值,给操纵者一种没有达到操纵目的的错觉,容易产生误操作;Ⅴ区的作业强度过大,能量消耗过大,使人容易产生疲劳,甚至有可能造成一定程度的损伤。综合上述,变速杆操纵力舒适性划分为5个区域、3个等级,如表3所示。

表3 变速杆操纵力舒适性等级划分表
5 结论
(1)将作业强度和感知强度点集转化成基于欧式距离的矢量形式,以此用来描述操纵力舒适性,对操纵力舒适性的评价具有很好的借鉴意义。
(2)采用模糊聚类分析法,可在无先验知识的情况下,对样本数据进行有规则的识别分类,为操纵力舒适性的等级划分提供了一种新方法。
[1]Haj-Fraj A,Pfeiffer F.Optimal Control of Gear Shift Operations in Automatic Transmissions[J].Journal of the Franklin Institute,2001,338:371-390.
[2]Zeng Zhiqiang,Wu Qun,Yang Cheng,et al.An Evolution Method of Driving Seat Comfort Based on Least Squares Support Vector Regression[C].2009 Fifth International Conference on Natural Computation,2009:455-459.
[3]Wang Xuguang,et al.Biomechanical Evaluation of the Comfort ofAutomobile Clutch Pedal Operation[J].International Journal of Industrial Ergonomics,2004,34:209-221.
[4]Miyuki Morioka,Griffin Michael J.Equivalent Comfort Contours for Vertical Vibration of Steering Wheels:Effect of Vibration Magnitude,Grip Force,and Hand Position[J].Applied Ergonomics,2009,40:817-825.
[5]杨晓明,邱清盈,潘双夏,等.基于Hausdorff距离的摩托车制动器操纵舒适性优化设计方法[J].机械工程学报,2006,42(6):170-173.
[6]刘正琼,刘明周,扈静.基于HFE理论的汽车操纵力舒适性测评仪[J].电子测量与仪器学报,2008,22(6):91-96.
[7]周一鸣,毛恩荣.车辆人机工程学[M].北京:北京理工大学出版社,1999.
[8]Ekman G.A Simple Method for Fitting Psychophysical Power Functions[J].Journal of Psychology,1961,51:343-350.
[9]Bolton Matthew L.Modeling Human Perception:Could Stevens'Power Law Be an Emergent Feature?[C].2008 IEEE International Conference on Systems, Man and Cybernetics,(SMC 2008),2008:1072-1077.
[10]Antonio Flores-Sintas,Cadenas Jose M,Martin Fernando.Detecting Homogeneous Groups in Clustering Using the Euclidean Distance[J].Fuzzy Sets and Systems,2001,120:213-225.
[11]Bezdek J C.Pattern Recognition with Fuzzy Objective Function Algorithms[M].New York:Plenum,1981.
[12]蔡启明,余臻,庄长远.人因工程[M].北京:科学出版社,2005.
猜你喜欢
世界建筑(2022年11期)2022-12-05 06:56:02
知识窗(2022年6期)2022-07-08 23:40:36
工会博览(2022年9期)2022-06-30 09:30:48
中老年保健(2021年10期)2021-11-30 09:34:06
中学生数理化·高一版(2021年11期)2021-09-05 12:21:24
建筑热能通风空调(2018年5期)2018-07-09 03:16:38
池州学院学报(2017年3期)2017-10-16 01:38:35
现代防御技术(2016年1期)2016-06-01 12:13:28
新高考·高一物理(2016年1期)2016-03-05 22:47:39
消费者报道(2016年3期)2016-02-28 19:07:32